




 广告
广告





















































法规标准-C-NCAP评测标准解析(2024版)

车辆直行经过前方运动的行人
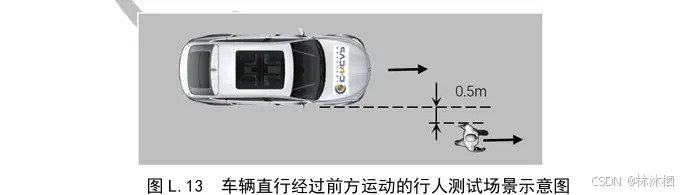
在本测试场景下,VUT以30km/h的速度沿直线行驶,行人目标在VUT路径右侧以5km/h的速度向前移动,其朝向与VUT行进方向相同。在VUT经过行人目标时,保证VUT车身最外缘(近行人目标侧,不包括外后视镜)与行人最外侧(近VUT侧)之间的横向距离为0.5m。当VUT最前缘与行人目标的纵向距离为100m时试验开始,当VUT车身完全经过行人目标时,试验结束
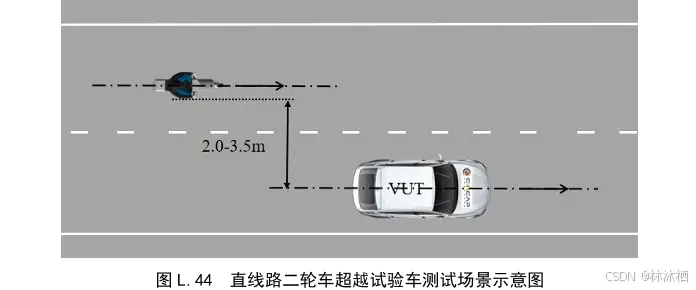
车辆直行经过对向运动的二轮车

在本测试场景下,VUT以30km/h的速度沿直线行驶,二轮车目标在VUT路径左侧以10km/h 的速度向前移动,其朝向与VUT行进方向相反。在VUT经过二轮车目标时,保证VUT车身最外缘(近二轮车目标侧,不包括外后视镜)与二轮车(包含驾驶员)最外缘(近VUT侧,不含后视镜)之间的横向距离为0.5m。当VUT最前缘与目标二轮车最后缘的纵向距离为100m时试验开始,当VUT车身完全经过二轮车目标时,试验结束
车辆直行避让本车道前方静止车辆
在本测试场景下,VUT以40km/h的速度沿直线行驶,一个静止的车辆目标被放置在VUT路径上,重叠率为100%,其朝向与VUT行进方向相同。VUT在接近目标车时开始向左侧邻车道转向避让。当VUT开始转向时,对目标车的TTC≤4.2s。在换道过程中,VUT的速度保持40km/h,当VUT与目标车的重叠率为0%时,对目标车的TTC≤3.3s。当VUT与目标车距离为100m时开始试验,当VUT车身完全经过目标车时,试验结束
车辆直行经过单侧顺序停放的车辆
在本测试场景下,VUT以20km/h的速度沿直线行驶,经过路径一侧停放的三辆静止目标车辆,目标车之间的纵向距离为1.0m。在VUT经过静止目标车辆时,第一、二辆目标车最外缘(近VUT侧,不含后视镜)与VUT车身最外缘(近目标车侧,不含后视镜)之间的横向距离为0.8m,第三辆目标车最外缘(近VUT侧,不含后视镜)与VUT车身最外缘(近目标车侧,不含后视镜)之间的横向距离为0.5m。在第一、二辆目标车中间放置一个静止的行人目标,朝向目标车路径一侧,行人目标最外缘与第三辆目标车最外缘平齐。当VUT最前缘与第一辆目标车辆最后缘的纵向距离为100m时试验开始,当VUT车身完全经过三辆目标车时,试验结束
车辆直行经过双侧顺序停放的车辆
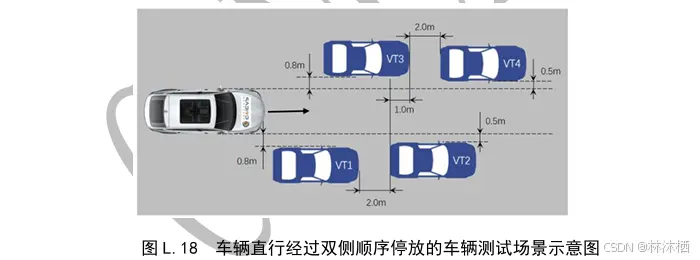
在本测试场景下,VUT以20km/h的速度沿直线行驶,经过路径两侧停放的四辆静止目标车辆,同侧目标车之间的纵向距离为2.0m。左右两侧车辆在纵向上错位摆放,左侧第一辆目标车车头最外缘超过右侧第二辆目标车车尾最外缘1.0m。在VUT经过静止目标车辆时,左右两侧第一辆目标车最外缘(近VUT侧,不含后视镜)与VUT车身最外缘(近目标车侧,不含后视镜)之间的横向距离为0.8m,左右两侧第二辆目标车最外缘(近VUT侧,不含后视镜)与VUT车身最外缘(近目标车侧,不含后视镜)之间的横向距离为0.5m。当VUT最前缘与右侧第一辆目标车辆最后缘的纵向距离为100m时试验开始,当VUT车身完全经过四辆目标车时,试验结束
车辆转弯经过弯道外侧行人

在本测试场景下,VUT以30km/h的速度向道路外缘半径为30m的弯道行驶,一个静止
的行人目标被放置在车道外缘和VUT路径中心线延伸的交点上,行人朝向沿车道外缘切线方向,与车辆行驶方向相同。VUT在进入弯道前制动减速,使之在开始转弯时,车速≥22km/h,对静止行人目标的TTC≤1.6s。在弯道中,VUT行驶在外侧车道中间。之后,VUT继续以≥22km/h 的恒定速度在弯道内转弯。当VUT与行人目标的重叠率变为0%时,对行人目标的TTC≤1.1s。当 VUT 距离弯道起始处为100m时试验开始,当VUT车身完全经过行人目标时,试验结束。
车辆直行前方行人横穿终止
在本测试场景下,VUT以30km/h的速度测试,在车辆右侧放置护栏,护栏边缘(近试
验车侧,不包括底座)到车辆车身最外缘(近护栏侧,不包括外后视镜)的距离为0.5m,护栏总长度不少于10m。行人以5km/h的速度以与车辆行驶方向垂直的方向移动,在接近护栏时行人停止,行人停止后其轮廓最外缘距离车辆车身最外缘(近行人侧,不包括外后视镜)的距离为0.5m。行人停止时,VUT对行人的TTC≤1.4s。行人路径总长度为5m,其中加速段和减速段各1m,匀速3m。当VUT距离行人轨迹100m时试验开始,当VUT车身完全通过行人目标时,试验结束
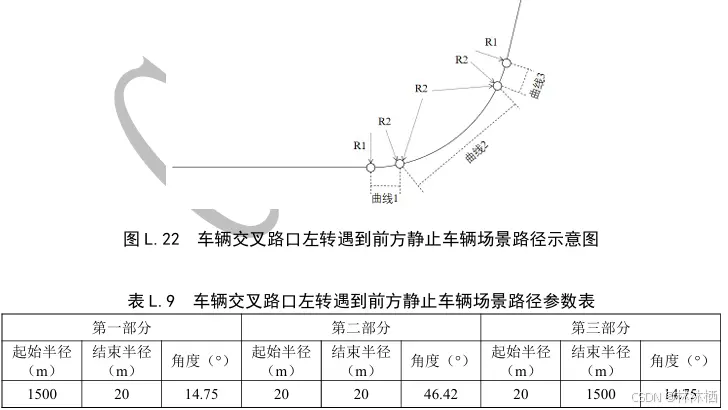
车辆交叉路口左转遇到前方静止车辆
在本测试场景下,VUT以30km/h的速度向交叉路口行驶,一辆静止的目标车摆放在VUT对向邻车道,目标车左前侧与其车道线外缘平齐,目标车与其车道线的夹角为20±10°(如图L.21)。VUT在开始左转向时制动减速至≥16km/h,与迎面车辆目标的TTC≤2.8s。VUT在十字路口左转过程中,速度降低到≥10km/h。当VUT与对向车辆的重叠率变为0%时,与对向车辆的TTC≤1.7s。当VUT距离目标车100m时试验开始,当VUT完成左转弯时,试验结束。
VUT转向路径的具体参数设置如下:
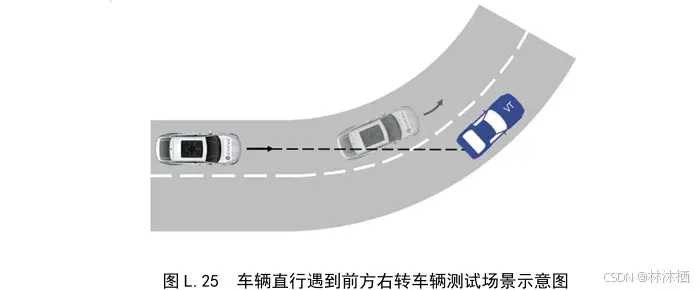
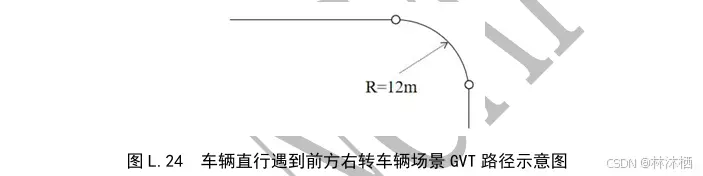
车辆直行遇到前方右转车辆
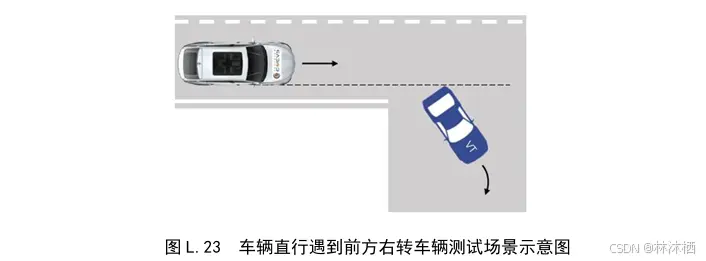
在本测试场景下,VUT跟随前方VT,均以40km/h的速度在直路上行驶。之后VT通过制动减速至10km/h以在拐角处右转,VUT也通过制动减速以与VT保持适当距离。当VT开始向右转弯时,VUT的速度不小于26km/h,与VT的TTC≤4.7s。之后,VUT减速至≥20km/h的速度,然后匀速行驶。当VUT与VT的重叠率变为0%时,VUT对VT的TTC≤2.5s。
VT转向路径的具体参数设置如下:弧线部分半径为12m,角度为90°



 广告
广告




最新资讯
-
NOFFZ 发布全新板级测试治具以及测试设备的
2025-03-10 15:47
-
精准测量,绝缘护航 ——陶瓷基板绝缘电阻
2025-03-10 12:13
-
【线下研讨会邀请】NG-eCall车载事故紧急呼
2025-03-10 12:12
-
越野车的性能——可变形路面上的车辆动力学
2025-03-10 12:12
-
韩国修订新车准入标准,2025.5.30开始执行
2025-03-10 09:00
