




 广告
广告





















































智能汽车冗余电控制动系统电流传感器故障容错控制

传感器故障根据故障后的信号表现形式主要可以分成3种:传感器卡滞故障、传感器增益故障、传感器恒偏差故障。由于实际故障是危险的、不易发生的,因此通过算法模型模拟传感器故障信号进行电流传感器故障注入,故障注入试验列表如表3所示。为方便绘图与说明,将电流传感器无故障状态定义为故障状态0,单相电流传感器故障为故障状态1,相电流传感器故障为故障状态2。
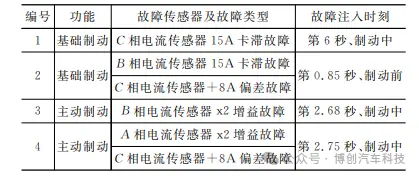
表3 故障注入试验列表
故障注入试验 1 为基础制动功能下单相电流传感器故障,试验结果如图11所示。在注入卡滞故障后,C相电流发生突变,残差立刻超过阈值,在超过阈值状态下维持10ms后,判定C相电流传感器故障。由于是单相电流传感器故障,故障状态为1,采用基于坐标变换的软件冗余容错控制方法仍由IBC进行制动,使a相与A相轴线处于同一方向的坐标变换完成控制,从制动压力控制情况可以看到制动系统仍可根据目标压力完成建压动作。
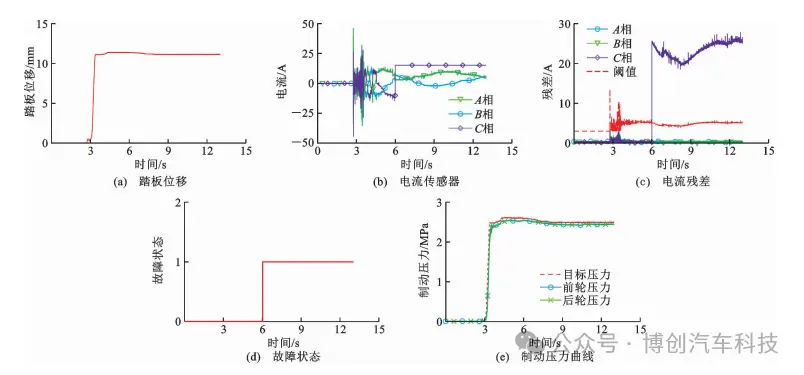
图11 故障注入试验1测试结果
故障注入试验2为基础制动功能下多相电流传感器故障,试验结果如图12所示。在制动前分别向B相和C相注入卡滞和偏差故障后,两相电流残差均立刻超过阈值,在超过阈值状态下维持10ms后,判定B相和C相电流传感器故障。由于是多相电流传感器故障,故障状态为2,在输出传感器故障状态的同时,IBC进入机械备份状态,同时向RBU发送激活信号,由RBU对两前轮轮缸建压。从制动压力曲线可以看到,前轮可以由RBU建压达到目标压力,完成制动动作。
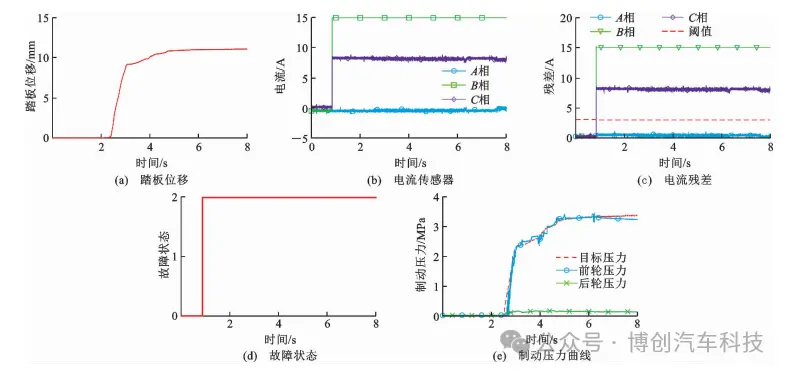
图12 故障注入试验2测试结果
故障注入试验3为主动制动功能下单相电流传感器故障,试验结果如图 13 所示。由图 13 可见:在制动初期电机启动,电机电流出现较大波动造成1.6s 左右残差信号短暂超过阈值,从图 13(b)的局部放大图中可以看到,此时电流残差信号虽然存在短暂超过阈值的现象,但持续时间未超过10ms的时间阈值,因此判定为无故障。在注入增益故障后,B相电流发生突变,残差立刻超过阈值,在超过阈值状态下维持10ms后,判定B相电流传感器故障。由于是单相电流传感器故障,故障状态为1,采用基于坐标变换的软件冗余容错控制方法仍由IBC进行制动,由a相与C相轴线处于同一方向的坐标变换完成控制,从制动压力控制情况可以看到制动系统仍可根据目标压力完成建压动作。由于本文采用的故障诊断算法在诊断出故障后需手动重置故障状态,因此在4~5s期间虽然由于电流残差低于阈值,但是故障状态依然为1,由基于坐标变换的软件冗余容错控制完成制动动作。
图13 故障注入试验3测试结果
故障注入试验4为主动制动功能下多相电流传感器故障,试验结果如图14所示。由图14可见:同样地,由于制动初期电机电流波动较大,导致1.5s左右残差信号短暂超过阈值,但从图14(b)中的局部放大图中可以看到,其持续时间未超过10ms的时间阈值,因此判定为无故障。在注入故障后,由于A相电流传感器为增益故障,在故障注入时刻A相电流信号接近为0,未能立刻检测出故障;C相电流传感器为偏差故障,电流信号发生突变,残差立刻增大,超出时间阈值10ms后,判断C相电流传感器故障,为单相电流传感器故障,故障状态为1,仍由IBC进行制动;待A相电流开始变大,残差增加并于3.498s时超过阈值,在维持10ms到达3.508s后判定A相电流传感器故障,此时A、C相电流传感器皆为故障,为多相电流传感器故障,故障状态为2,在输出传感器故障状态的同时,IBC进入机械备份状态,同时向RBU发送激活信号,由RBU对前轮轮缸建压。从图14(d)可以看到,在由IBC切换到RBU控制后,重新计算目标压力对前轮轮缸压力进行控制,同时后轮泄压,由建压结果可知前轮由RBU建压达到目标压力,完成制动动作。
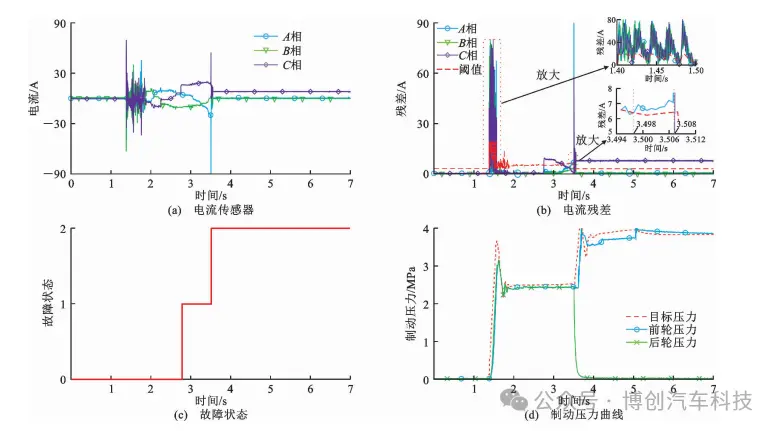
图14 故障注入试验4测试结果
上述故障1~4的故障注入试验结果可以说明,在基础助力功能和主动制动功能下,本文设计的冗余电控制动系统容错机制能够根据电流传感器故障状态选择正确的容错控制方法,且本文设计的容错控制方法能够在故障下进行压力控制,完成冗余电控制动系统的容错控制,能够满足智能汽车对制动系统的要求,提高了智能汽车制动系统可靠性。
4 结语
(1)本文针对冗余电控制动系统,设计了电流传感器故障的容错机制,根据电流传感器故障状态选择不同的容错控制方法,设计了基于坐标变换的软件冗余容错控制实现单相电流传感器故障容错控制,设计了RBU压力控制实现多相电流传感器故障硬件冗余容错控制。
(2)本文的容错控制机制融合了软件冗余及硬件冗余容错控制方法,弥补了纯软件冗余在可靠性方面的不足,补充了冗余电控制动系统容错机制方面的研究,可以满足L3及以上等级自动驾驶系统对制动系统安全的要求。
(3)受条件所限,本文的冗余电控制动系统容错控制仅考虑电流传感器故障,而在冗余电控制动系统中存在多个对压力控制起到关键作用的传感器,
如何针对不同类型传感器的故障实现容错控制,将是接下来的研究方向。
作者:
朱冰, 党瑞捷, 赵健, 陈志成 吉林大学 | 隋清海,官浩,劳德杏,刘志鹏 中国第一汽车股份有限公司



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
