




 广告
广告





















































ENCAP2026对车道偏离碰撞避免的要求(上)

1.背景、定义&测试设备
2.测试程序
3.测试执行
4.评估标准和评分
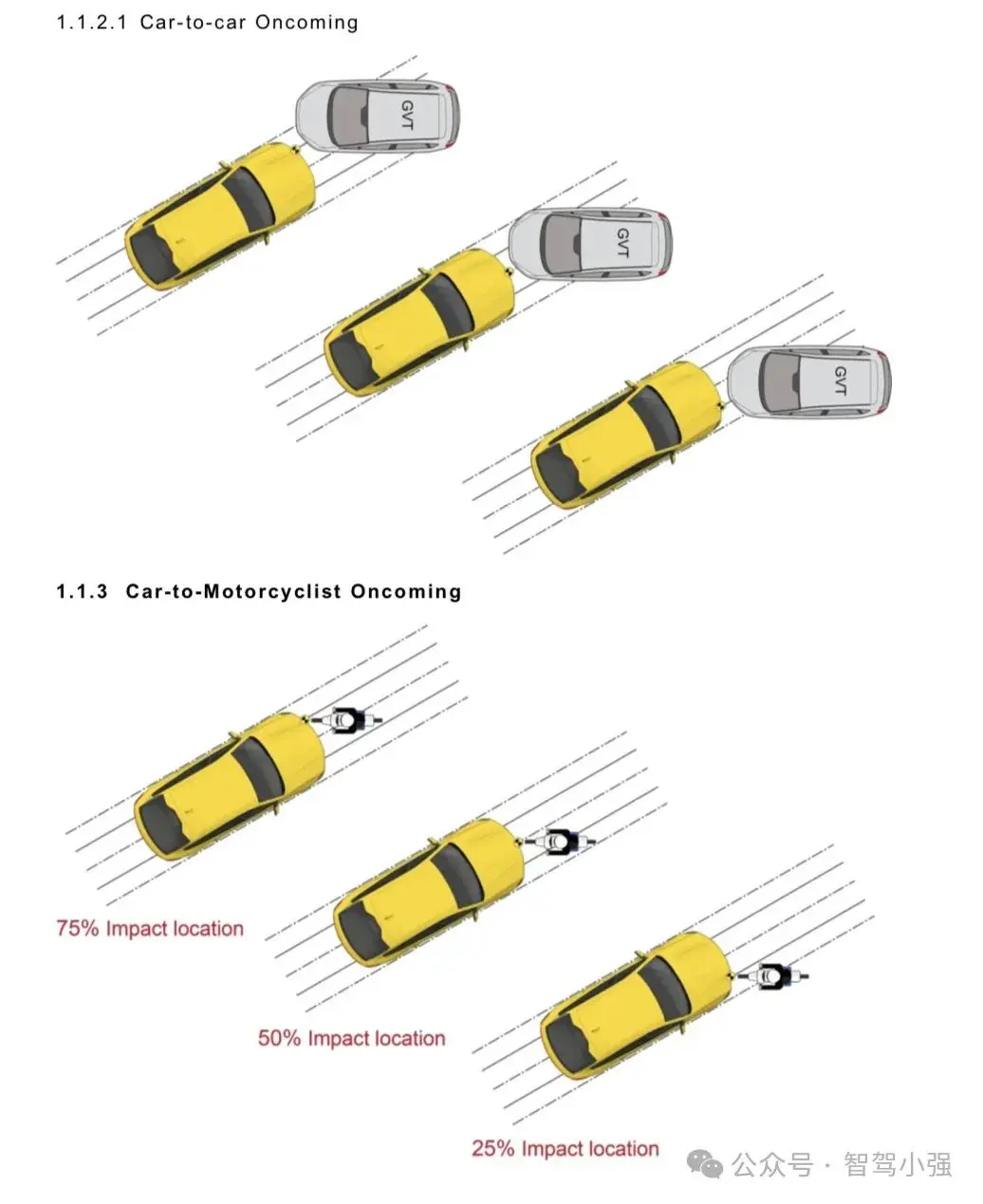
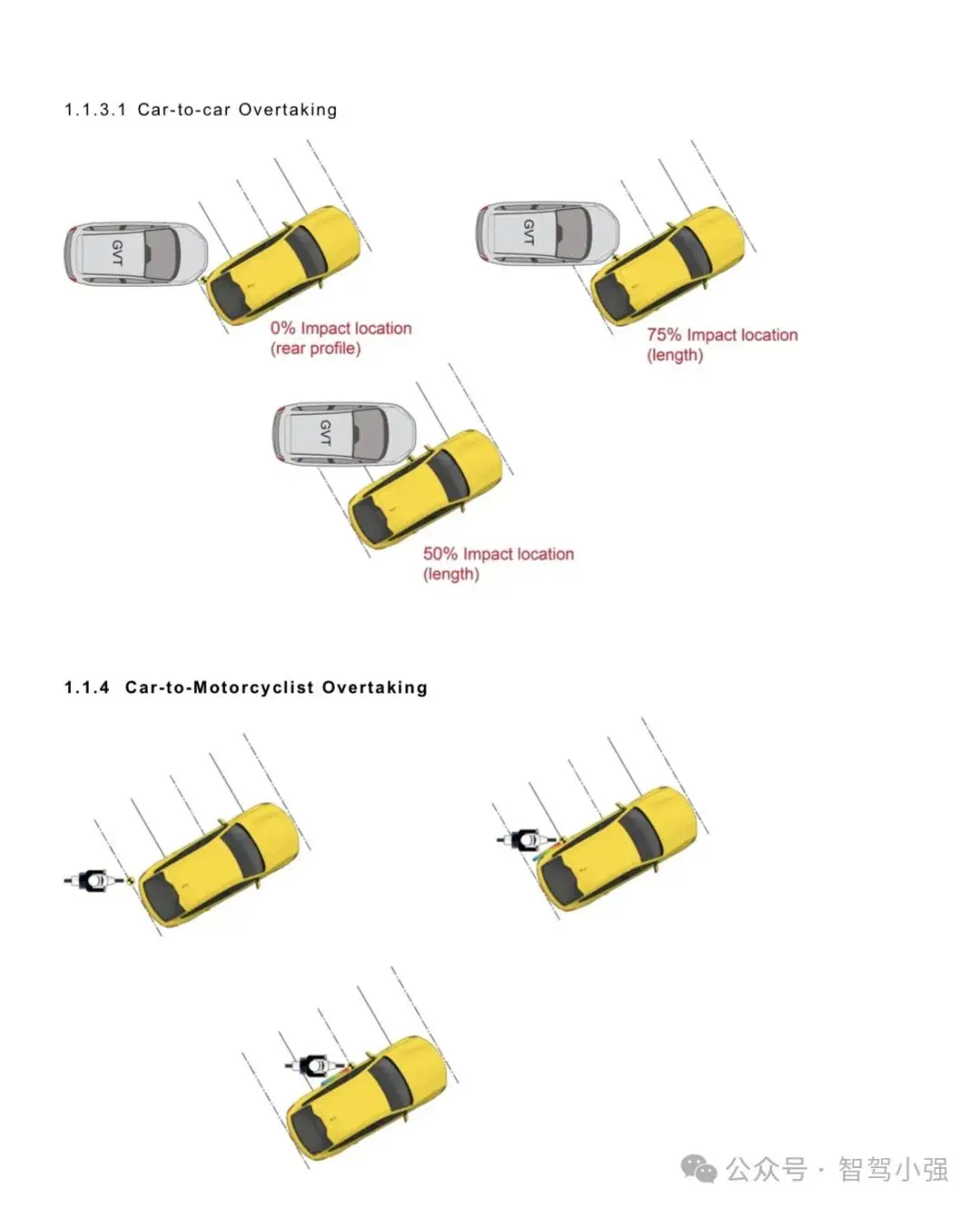
5.对向来车&超车测试用例
6.车道偏离路径
1.背景、定义&测试设备
2026年1月起,欧洲新车测评规程将实行ENCAP2026-2028版。
由前文《25年6月的新车要按ENCAP2026测试了?》可知,ENCAP2026分为四部分,分别是:
安全行驶Safe Driving
碰撞避免Crash Avoidance
碰撞保护Crash Protection
撞后安全Post Crash Safety
碰撞避免Crash Avoidance满分100分,分为前向碰撞避免(60分)、车道偏离碰撞避免(20分)、低速碰撞避免(20分)三部分。
碰撞避免前向碰撞60车辆和摩托车40行人和自行车20车道偏离碰撞20仅自车10车辆和摩托车10低速碰撞避免20车辆和摩托车10行人和自行车10
峰值制动系数PBC(Peak Braking Coefficient):使用UNECE R13H中规定的方法,根据滚动轮胎的最大减速量测量轮胎与路面的摩擦。
紧急车道保持ELK(Emergency Lane Keeping):当检测到车辆即将偏离车道边界(即实线标记、道路边缘等)或进入相邻车道的对向或超车场景时,自动应用的默认开启的航向校正。
车道保持辅助LKA(Lane Keeping Assist):车辆在检测到车辆即将漂移到当前行驶车道的划定边线之外时自动应用的航向校正。
车道偏离报警LDW(Lane Departure Warning):由车辆自动提供的警告,以响应车辆即将漂移超出当前行驶车道的划定边线。
被测车辆VUT(Vehicle under test):指根据本协议测试的配备了紧急车道保持ELK、车道保持辅助LKA和/或车道偏离报警LDW系统的车辆。
全球车辆目标GVT(Global Vehicle Target):指IS019206-3:2021中定义的本协议中使用的车辆目标。
ENCAP摩托车骑手目标EMT:指ISO 19206-5中定义的摩托车骑手和摩托车目标。
真实摩托车(Real Motorcycle):指可以在本协议的盲点监测测试中使用的摩托车骑手目标,作为EMT的替代方案。真实摩托车应是一种经过型式认证的两轮摩托车,设计最大速度至少为80km/h,没有前整流罩或挡风玻璃。它应与EMT非常相似,轴距在1405~1445mm之间。
碰撞时间TTC(Time To Collision):指VUT撞击测试目标之前的剩余时间,假设VUT和测试目标将继续以其行驶速度行驶。
标准范围(Standard range):最基本、参数最受控的标准测试场景。标准范围内的测试被认为是任何给定测试场景的基本性能期望。
扩展范围(Extended range):是指在标准范围的测试中引入较小复杂程度的测试点。该范围的变化仅限于VUT和/或测试目标的横向或纵向速度变化。
鲁棒性层(Robustness layer):指引入测试复杂性和变化,旨在挑战车辆系统并鼓动可靠的“真实世界”性能。
车道边缘(Lane Edge):车道标志或道路边缘的内侧。
到车道边缘的距离DTLE(Distance To Lane Edge):指在VUT穿过车道边缘之前,车道边缘和轮胎最外缘之间的剩余横向距离(垂直于车道边缘),假设VUT将继续以相同的横向速度向其行驶。车道边缘内为正直,外部为负值。
驾驶员意图监测系统DIMS(Driver Intention Monitoring System):一种有效区分有意和无意车道偏离并抑制不希望的干预和/或警告的系统。
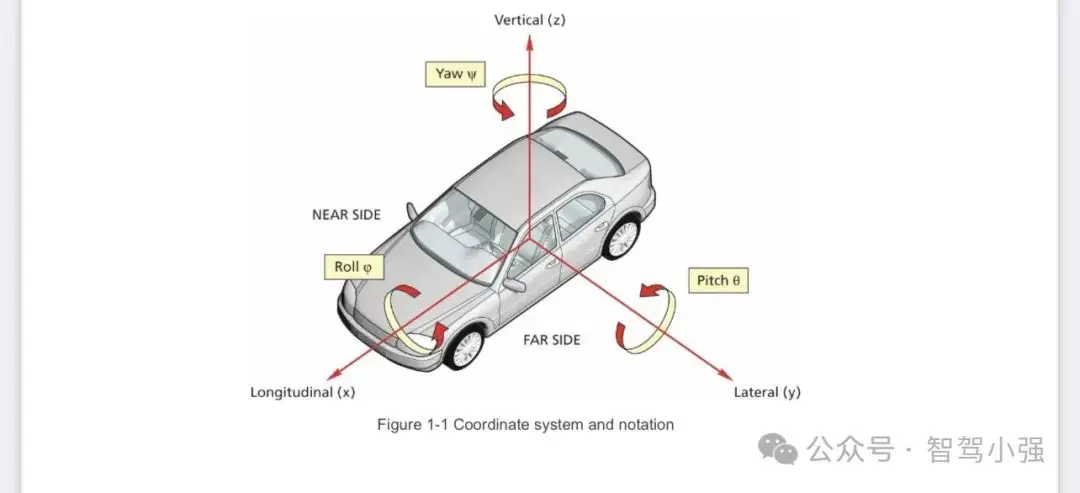
1.1 参考坐标系
使用ISO 8855:2011中规定的约定,原点位于VUT中心线上的最前方点,用于动态数据测量。如下图所示,该参考系统应用于左驾驶和右驾驶车辆。在图中,左舵车辆显示了近侧和远侧。对于右舵车辆,近侧和远侧刚好反过来。
1.2 碰撞位置
1.3 测量量和变量
以至少100Hz的频率采样并记录所有动态数据。使用DGPS时间戳将目标数据与VUT的数据同步。
DGPS即差分全球定位系统,详见前文:
自动驾驶从小白到小强18~GPS与DGPS
1.3.1 变量
T0:在直线路径上行驶2s的时间
TLDW:LDW激活的时间
Tsteer:VUT进入曲线段位置的时间
Tcrossing:VUT穿过车道线或道路边缘的时间
XVUT,YVUT:整个测试期间VUT的位置
XGVT,YGVT:整个测试期间GVT的位置
XEMT,YEMT:整个测试期间EMT的位置
Vlong,VUT:整个测试期间VUT的纵向速度
Vlat,VUT:整个测试期间VUT的横向速度
VGVT:整个测试期间GVT的速度
ψVUT:在整个测试期间,VUT的偏航角速度
ψtarget:在整个测试期间,目标的偏航角速度
ΩVUT:在整个测试期间,VUT的方向盘转速
1.3.2 测量精度
为VUT和GVT配备数据测量和采集设备,数据采集和记录精度至少为:
VUT和目标速度精度为:0.1km/h;
VUT和目标横向和纵向位置精度为:0.03m;
VUT方向角度精度为:0.1°;
VUT和目标偏航角速度精度为:0.1°/s;
VUT和目标纵向加速度精度为:0.1m/s²;VUT方向盘转速精度为:1.0°/s。
1.4 数据滤波
过滤测量数据如下:
位置和速度不需过滤,而是在其原始状态下使用。 加速度、偏航角速度、方向盘扭矩和方向盘转速,使用截止频率为10Hz的12极相位的Butterworth滤波器过滤。
1.5 测试路面
在干燥(表面无可见水分)、均匀、实心的铺装路面上进行试验,最大纵向坡度为±1%,最大横向坡度为±3%。
试验路面应具有0.9的最小峰值制动系数(PBC),测试轨道表面必须为铺装路面,测试车道中心两侧3.0m的横向距离内不得含有不规则干扰(例如,大倾角或裂缝、井盖或反光螺柱),这些不规则干扰可能会导致传感器测量异常,不得出现在测试路径中心两侧横向距离3.0m内,和测试结束时VUT前方纵向距离30m内。
1.5.1 车道标记和路沿
本文档中描达的测试场景需要使用两种不同类型的车道标记,这样车道标记需要符合UNECE R130法规中定义的车道标记之一。车道标记内侧边缘和道路边缘之间的车道宽度为3.5~3.7m:
宽度在0.10~0.25m之间的虚线(中心线为0.1~0.15m); 宽度在0.10~0.25m之间的实线;
由草和/或砾石或任何其他批准的替代品组成的路沿。
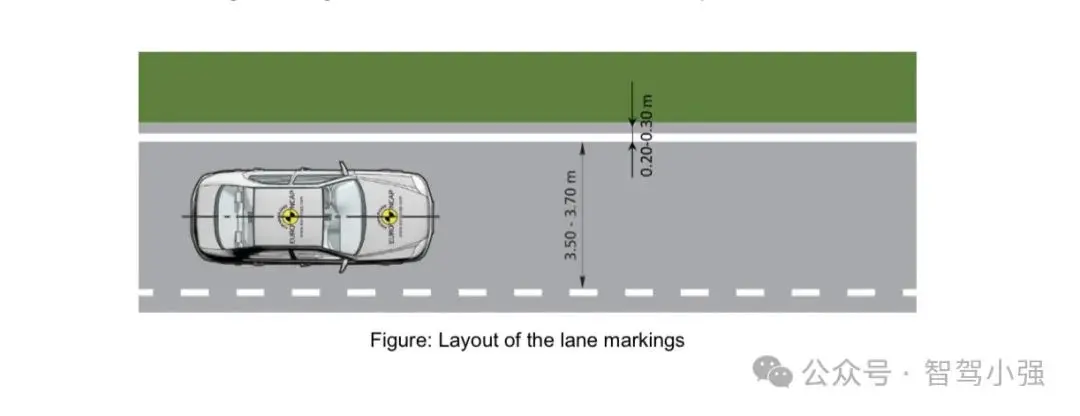
如适用,车道标记的内缘应距离道路边缘0.20~0.30m(在铺面路面和道路边沿材料之间的过渡)。 车道标记和/或路缘应该足够长,以确保测试完成后,车辆前面至少还有20m的标记。
1.5.2 天气条件
在环境温度高于5°C和低于40°C的干燥条件下进行测试。
不得有降雨,地面水平能见度应大于1km。风速应低于10m/s,以尽量减少对VUT的干扰。
自然环境照明必须在测试区域内均匀,并且在白天测试中环境光需超过2000勒克斯。除VUT引起的阴影外,测试区域内不得有强烈的阴影。确保在阳光直射时,测试不会朝着或远离太阳进行。
在每次测试开始时或至少每30分钟测量并记录以下参数:
以°C为单位的环境温度; 以℃为单位轨道温度;
风速单位为m/s;
方位角°和/或罗盘点方向的风向(监控);
环境亮度,单位为LUX。
1.6 VUT准备
1.6.1 系统设置
将系统的任何驾驶员可配置元素[例如车道偏离警告或车道保持辅助的时间(如果有)]设置为中间设置或中点下一个性能较差的设置,类似下图所示示例的设置。
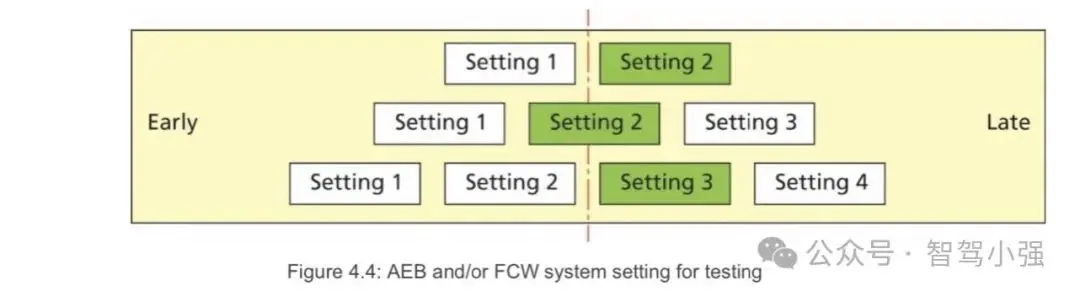
车道居中功能应关闭。此外,如果车辆的系统可以选择ELK或ELK+LKA模式,请在ELK+LKA模式下测试车辆。
1.6.2 轮胎 使用车辆制造商指定的品牌、型号、尺寸、速度和负载等级的新原装轮胎进行测试。允许更换由制造商提供或在代表制造商的官方经销商处购买的轮胎,前提是这些轮胎与原始设备的品牌、型号、尺寸、速度和负载等级相同。将轮胎充气到汽车制造商推荐的轮胎冷充气压。使用与最小负载正常条件相对应的充气压力。
更多乘用车轮胎信息,详见前文:
R30法规对乘用车轮胎的要求(上)
R30法规对乘用车轮胎的要求(中)
R30法规对乘用车轮胎的要求(下)
根据轮胎调节程序进行轮胎磨合。磨合后,在测试期间将磨合轮胎保持在车辆上的相同位置。
1.6.3 车轮定位测量 车辆应接受车辆(直列)几何形状检查,以记录OEM设置的车轮定位。这应该用车辆的空载重量来完成。
1.6.4 空载重量
如使用,在油箱中添加至少90%的燃料。
检查机油液位,必要时加到最高位。同样,如有必要,将所有其他液体的液位补充到最大液位。
确保车辆已安装备胎(如果配置),以及车辆随附的任何工具。车里不应该有其他物品。
确保所有轮胎都按照制造商的说明充气,以达到最低负荷状态。
测量前桥和后桥质量并确定车辆的总质量。总质量是车辆的“空载质量”。在测试细节中记录此质量。
通过从所需的200kg内部负载中减去驾驶员和测试设备的质量,计算所需的加载质量。
1.6.5 车辆准备
将车载测试设备和仪器安装在车辆中。还要安装任何相关的电缆、配电盒和电源,并放置具有压载质量的配载。任何添加的物品都应牢固地连接到汽车上。
驾驶员在车内时,称量车辆的前后轴载荷,并将这些载荷与“空载质量”进行比较。
车辆总质量应在空载质量的基础上加200kg之和的±1%以内。前/后轴载荷分布需要在原始空载质量加全燃料载荷的前/后轴载荷分布的5%以内。如果车辆与本段中给出的要求不同,可以移除或添加对其性能没有影响的物品到车辆上。任何增加车辆质量的物品都应牢固地固定在汽车上。 在添加或移除重量时需要小心,以尽可能接近原始车辆的惯性特性。在测试细节中记录最终前后轴载荷。在“测试”状态下记录VUT的前后轴载荷。
应进行车辆尺寸测量。就本测试程序而言,车辆尺寸应由二维多边形表示,该多边形由使用标准ISO 8855坐标系与车辆重心相对的横向和纵向尺寸定义。多边形的角由每个轮胎外缘平面与道路接触的横向和纵向位置定义。如下图所示,该平面是通过从轮胎最外侧边缘到轴距处的地面垂直线来定义的。
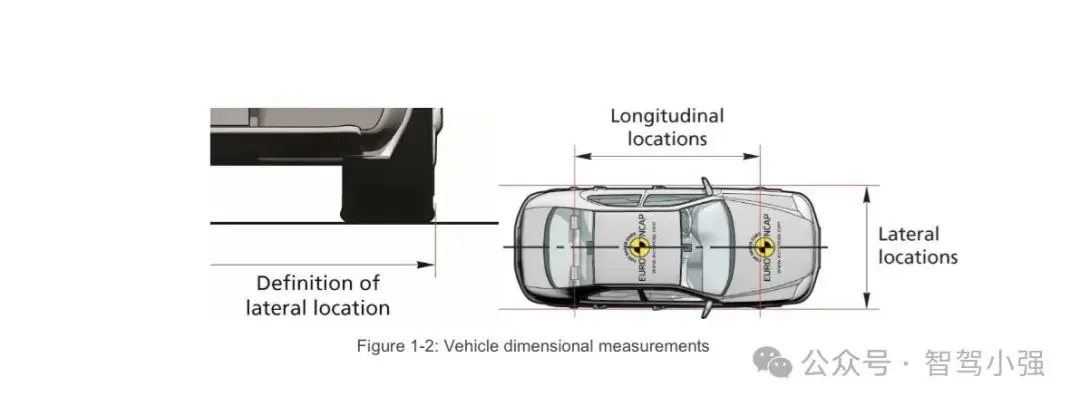
应测量和记录车辆的轴距以及横向和纵向位置。在测试前应检查转向机器人摩擦水平的要求,详见技术公告TB038。
- 下一篇:高通座舱芯片架构分析
- 上一篇:《“车路云一体化系统”建设与应用实施方案图》正式发布







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
