




 广告
广告





















































ENCAP2026对车道偏离碰撞避免的要求(中)

1.背景、定义&测试设备
2.测试程序
3.测试执行
4.评估标准和评分
5.对向来车&超车测试用例
6.车道偏离路径
2.测试程序
对车道支持系统LSS进行测试,驾驶员监控DSM系统将用于识别驾驶员是否处于分心状态(如适用)。
对于第5章中未定义的测试路径,请参阅第6章“车道偏离路径”以了解更多详细信息。
2.1 单一车辆
2.1.1 驾驶员接受性
2.1.1.1 驾驶性能
a)超控扭矩Overriding
以70km/h的车速,在每个指定的车道偏离测试点上执行两次闭环校准运行:路沿、实线、LKA虚线。
完成校准运行是为了确定:VUT的车道支持系统响应时间和特征。
运行1:在关闭所有车道支持系统的情况下完成所需的测试路径; 运行2:在打开所有车道支持系统的情况下完成所需的测试路径。
测试实验室应在两次测试中记录和监测VUT方向盘扭矩,并进行纵向比较,以确定任一系统设置的超控扭矩要求的显著差异
b)持续干预
将在0.2m/s和0.6m/s的横向速度之间进行连续的干预测试(如下表所示)。测试实验室必须对VUT两侧的实线和虚线标记,每个横向速度进行两次测试运行。
运行1:在关闭所有车道支持系统的情况下完成所需的测试路径; 运行2:在打开所有车道支持系统的情况下完成所需的测试路径。 VUT应以70km/h的速度行驶,并遵循测试路径(保持路径模式),测试实验室将监控和记录方向盘扭矩。
 干预持续时间将从[第一次转向扭矩表明LSS响应处于激活状态]开始测量,直到LSS响应被完全抑制,并且转向扭矩要求与非活动系统测量密切一致。这适用于车道偏离-路缘、实线、LKA-虚线在标准范围内的任何速度。
干预持续时间将从[第一次转向扭矩表明LSS响应处于激活状态]开始测量,直到LSS响应被完全抑制,并且转向扭矩要求与非活动系统测量密切一致。这适用于车道偏离-路缘、实线、LKA-虚线在标准范围内的任何速度。
c)转向速度
测试实验室应记录和监测VUT转向速度(或车辆制造商指定的替代指标),直到所有车道偏离-路缘的测试结束。
d)纠偏横向速度Vlat
测试实验室应记录和监测所有车道偏离-路缘场景的VUT横向速度,直到测试结束。
2.1.1.2 驾驶员状态链接
如果车辆配备了驾驶员状态监控系统,该系统可以针对驾驶员的注意力水平提高LSS灵敏度;鼓励制造商向ENCAP官方通报驾驶员状态链接策略的具体细节。 根据制造商所提供的信息,并在ENCAP的指导下,测试实验室将验证驾驶员分心和未分心状态下的车道支持系统性能。
2.1.2 车道偏离
2.1.2.1 道路边缘
车道偏离-道路边缘的标准和扩展测试范围如下图所示:
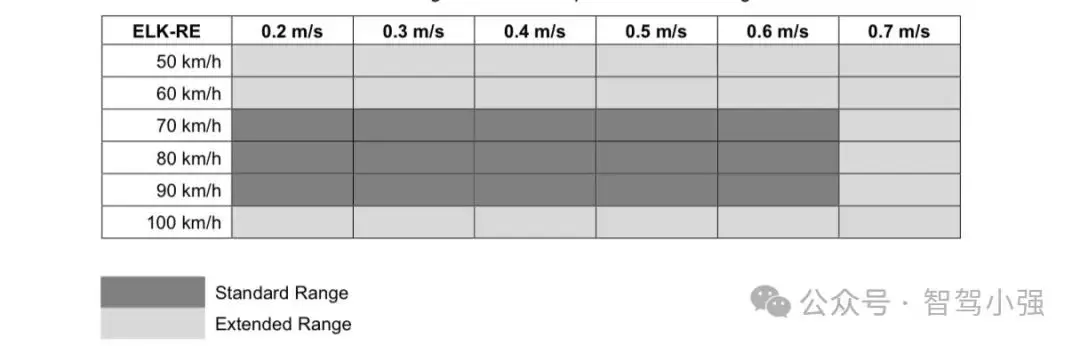
以下测试轨道和车道标记适用于标准和扩展测试范围。

测试实验室应记录和监控车道偏离警告(仅限触觉)在车道偏离-路缘扩展范围进行测试期间的时间。
2.2 车辆和摩托车
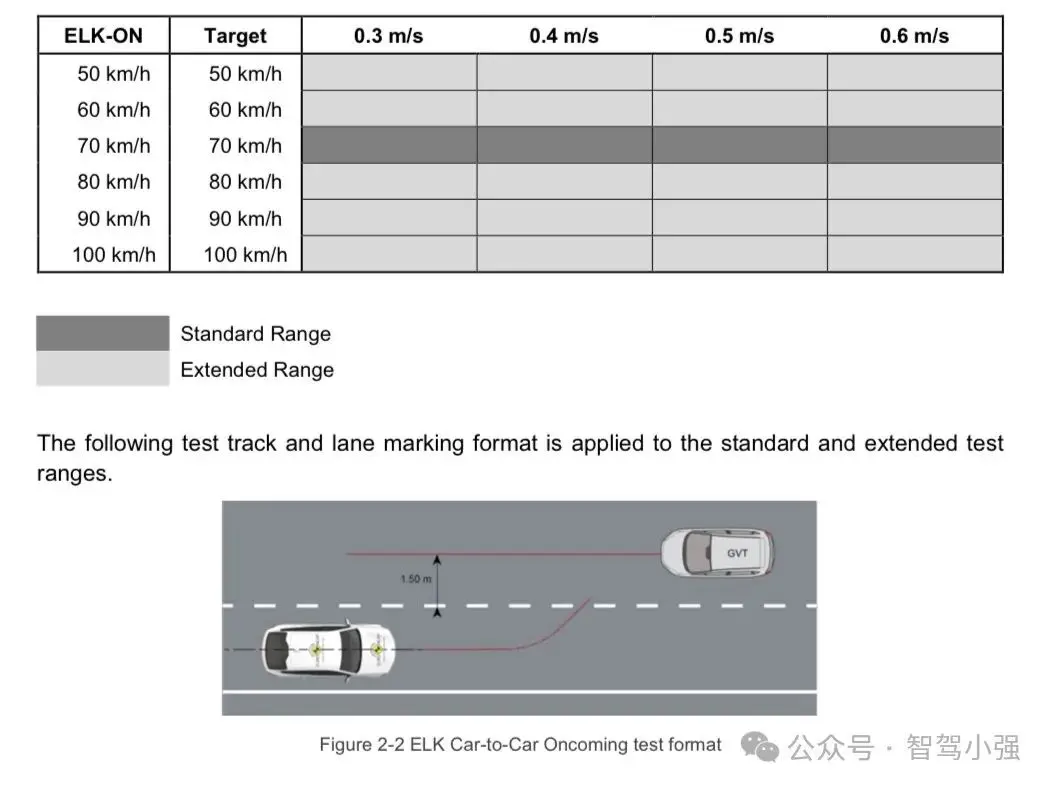
2.2.1 ELK对向来车
对于对向来车的场景,GVT将沿着与VUT初始位置相邻的车道直线行驶,方向与VUT相反。GVT目标的直线路径距离VUT车道的中心虚线标记内侧1.5m。
VUT和目标车辆的路径将同步,以便GVT的参考点与VUT前部的90%的碰撞位置与相遇(假设没有系统反应)。
ELK Car-to-Car Oncoming的标准和扩展测试范围如下所示:
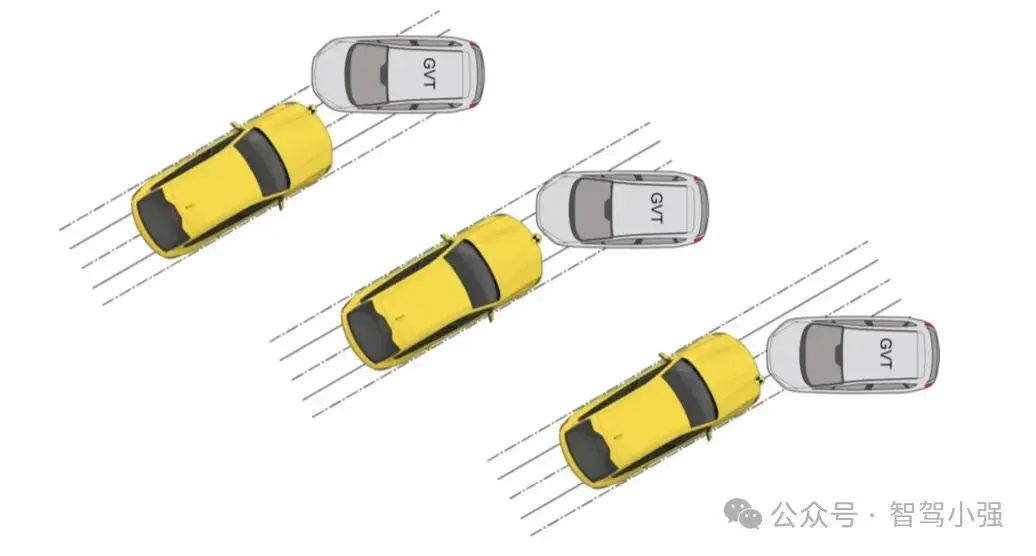
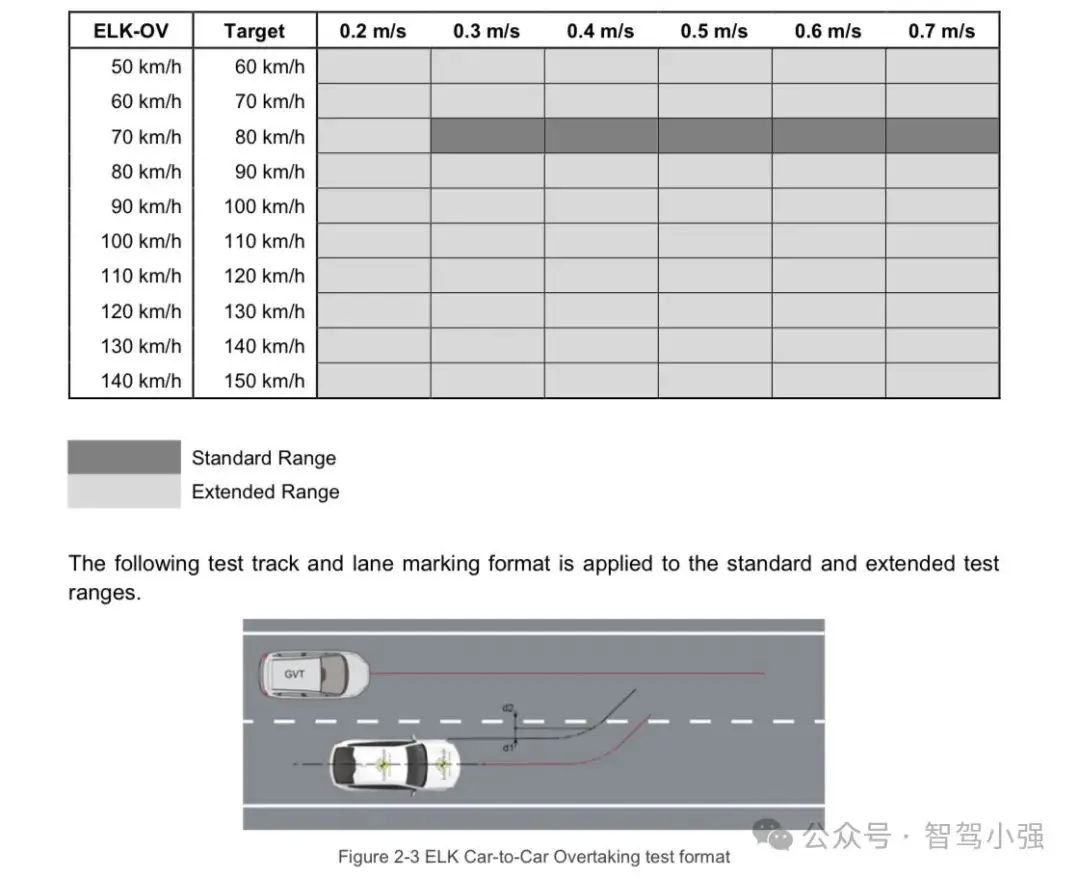
2.2.2 ELK超越汽车
对于超车场景,GVT将在与VUT驾驶员侧相邻的车道上直线行驶,方向与VUT相同。GVT目标的直线路径距离VUT车道的中心虚线车道标记内侧1.5m。
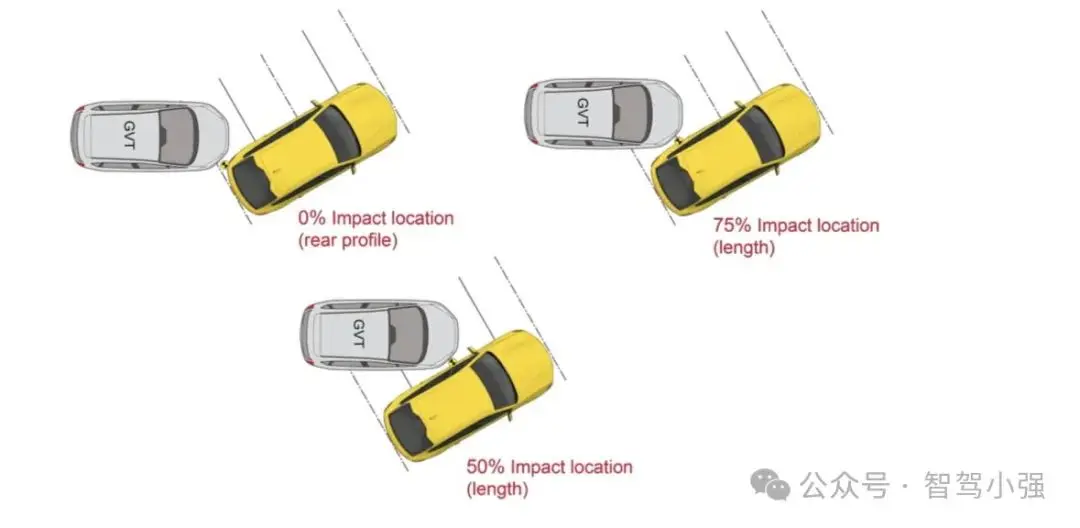
VUT和目标车辆的路径将同步,以便目标车辆前缘的0%位置参考点与VUT的后轴参考点相遇(假设没有系统反应)。
对于无意变道,ELK Car-To-Car超车测试将在0.3~0.6m/s的横向速度范围内以0.1m/s的增量阶梯进行;对于仅向驾驶员侧出发的有意变道,将在0.5~0.7m/s的范围内以0.1m/s的增量阶梯进行。有意变道操作将在转向指示灯打开时进行。
ELK Car-to-Car Overtaking的标准和扩展测试范围如下所示:
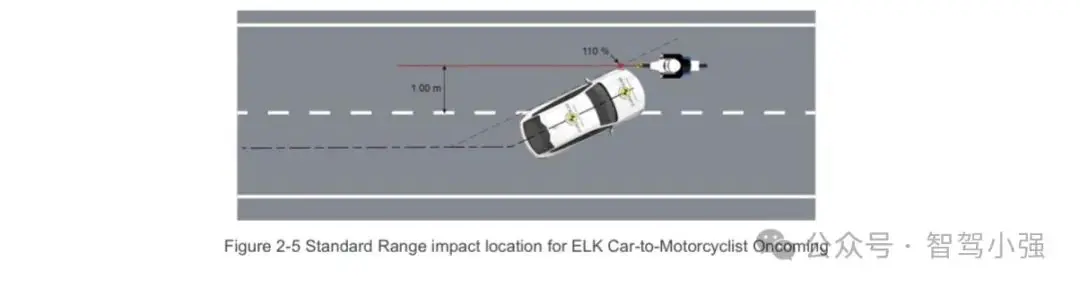
2.2.3 ELK对向来摩托车
对于对向来摩托车的场景,EMT将沿着与VUT初始位置相邻的车道以70km/h的速度直线行驶,方向与VUT相反。EMT目标的直线路径距离VUT车道的中心虚线标记内侧1m。
ELK Car-to-Motorcyclist Oncoming的标准和扩展测试范围如下所示:
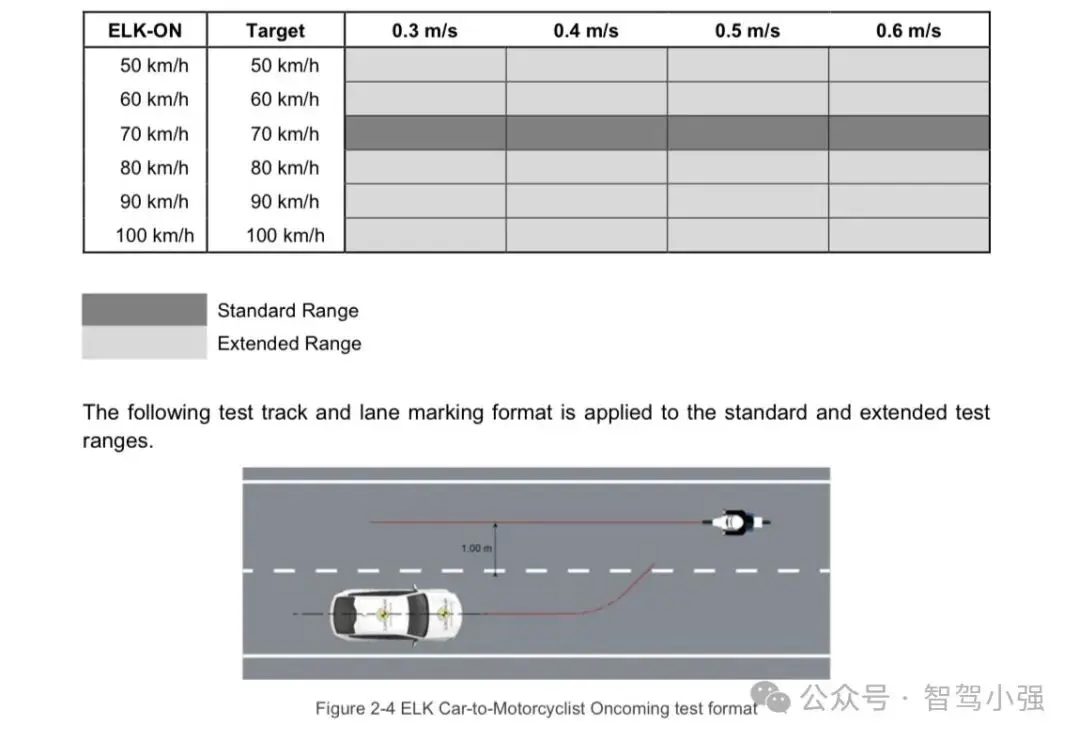
VUT和摩托车目标EMT的路径将同步,以便EMT目标的前轮参考点与VUT的110%碰撞位置参考点相遇(假设没有系统反应)。
2.2.4 ELK超越摩托车
对于超越摩托车场景,EMT将在与VUT驾驶员侧相邻的车道上直线行驶,方向与VUT相同。EMT目标的直线路径距离VUT车道的中心虚线车道标记内侧1m。
对于无意变道,ELK Car-to-Motorcyclist超车测试将在0.3~0.6m/s的横向速度范围内以0.1m/s的增量阶梯进行;对于仅向驾驶员侧出发的有意变道,将在0.5~0.7m/s的范围内以0.1m/s的增量阶梯进行。有意变道操作将在转向指示灯打开时进行。 ELK Car-to-Motorcyclist Overtaking的标准和扩展测试范围如下所示:
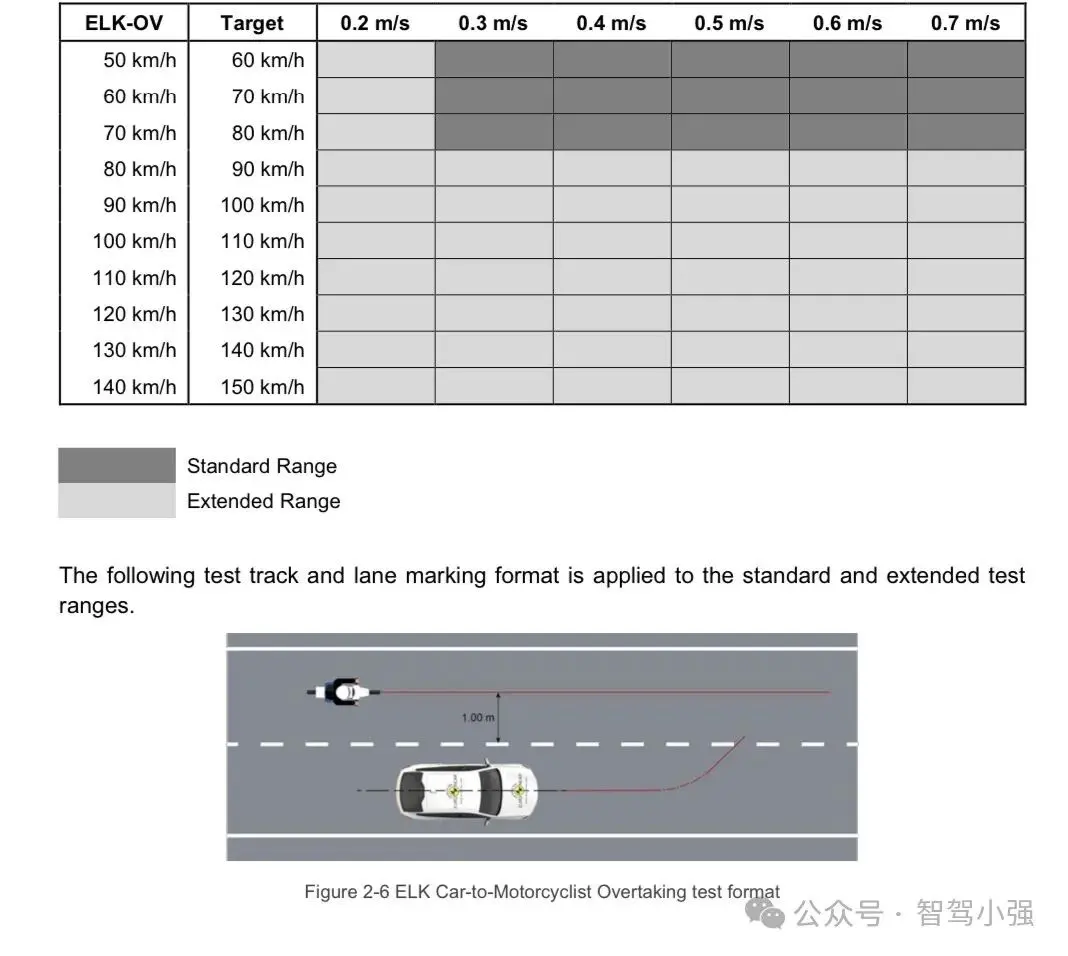
VUT和EMT的路径将同步,以便EMT的前轮碰撞点与VUT的后轴参考点相遇(假设没有系统反应)。
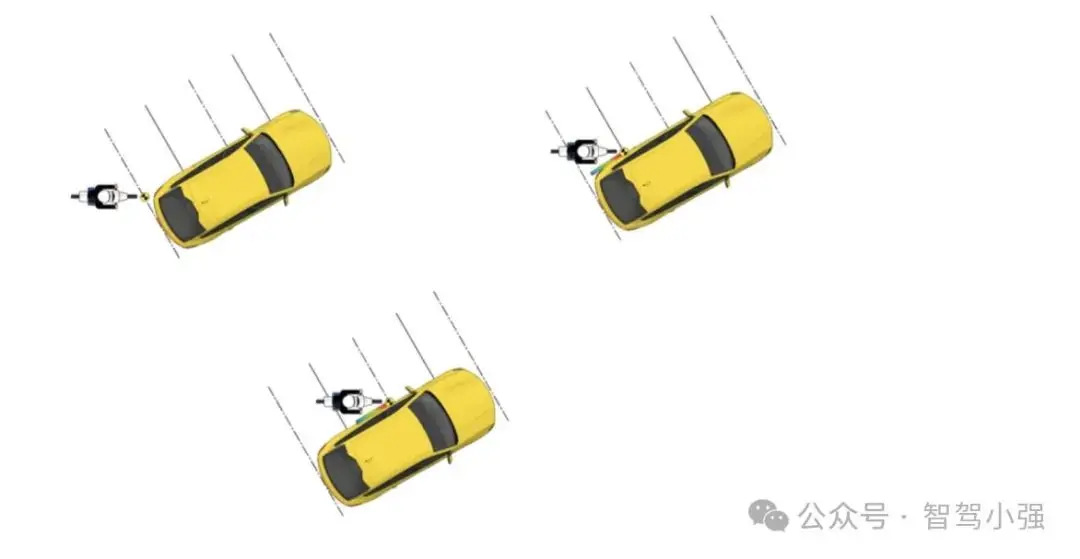
2.2.5 盲点监测
如果测试车辆无法满足ELK超车(汽车和/或摩托车)扩展场景的评估标准,则对盲点监控系统进行评估。即在扩展范围的适用纵向速度下检测到两侧相邻车道上的摩托车手和汽车。
3.测试执行
3.1 VUT测试前调节
3.1.1 一般要求
一辆新车被交付给测试实验室;然而,该车可能已被用于其他ENCAP主动安全测试,如AEB和低速碰撞避免等。
如果车辆制造商要求,并且该车尚未进行其他测试,可以在城市和农村道路的混合道路上行驶最多100公里,使用其他交通和路边公共设施来“校准传感器系统”。过程中应避免剧烈的加速和制动
3.1.2 轮胎
如果之前没有进行过其他测试,或者实验室没有进行100公里的驾驶,请以以下方式对车辆轮胎进行打磨,以去除轮胎表面脱模剂:
围绕直径约30m的圆圈行驶,速度足以产生大约0.5~0.6g的横向加速度,顺时针三圈,然后逆时针三圈。(30km/h左右)
在绕圈驾驶之后,立即以56km/h的速度进行四次麋鹿测试,在每次麋鹿测试中以1Hz的频率和足以产生约0.5~0.6g的峰值横向加速度的振幅进行十个正弦转向输入周期。 使最后一次麋鹿测试的最后一个周期的方向盘振幅是之前输入的两倍。
在正弦输入不稳定的情况下,将转向输入的振幅降低到适当的安全水平,并继续四次麋鹿测试。
新轮胎的花纹比较深,轮胎与地面接触部分没有完全磨合好,且新轮胎表面一般都有脱模剂,导致轮胎的抓地力不强,会对轮胎的制动效果产生不好的影响。
3.1.3 系统检查 在任何测试开始之前,最多执行十次运行,以确保系统正常运行。
3.2 测试场景
所有情况下的测试都将在为测试场景指定的横向速度范围内以0.1m/s的增量阶梯进行。
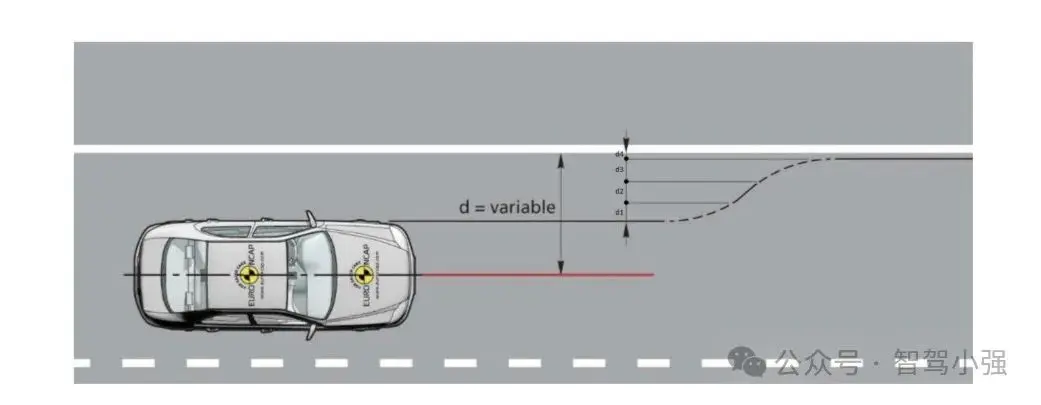
出于测试目的,测试路径为:初始直线路径→固定半径的弯道路径→直线路径。使用驾驶员输入或可以操控车辆的替代控制系统控制VUT,根据需要调节车辆控制以执行测试。
车辆制造商应提供信息,描述闭环路径和/或速度控制结束时的位置,以避免干扰每次测试的系统干预。然后,测试实验室应验证最高横向速度的释放点。否则,当车辆制造商未提供信息时,应对每个横向速度进行两次校准运行,以确定系统何时激活。比较两次运行的方向盘扭矩、车辆速度或偏航率,并确定哪里有显著差异来识别干预位置。
运行1:在关闭所有车道支持系统的情况下完成所需的测试路径,并测量控制参数;
运行2:在打开所有车道支持系统的情况下完成所需的测试路径,并测量控制参数。
在系统激活之前结束(转向)闭环控制。在校准运行的情况下,转向控制的释放应发生在测试路径上,并且在干预位置之前,不小于纵向5m。
司机在车内,称量车辆的前轴和后轴载荷。
如果在VUT达到选定的横向速度Vlat,vut之前就发生了干预,测试实验室将使用与弯曲车道标记相交的直线车辆路径对Vlat,vut=0.6m/s测试用例(包括虚线和实线)进行验证检查,该直线车道产生所需的偏航角度(Ψvut)。最多应进行3次运行(包括实线和虚线),其中系统干预和由此产生的DTLE被监控。
当闭环路径结束时,驾驶员的手或控制系统将在方向盘上保持被动,而不会施加有意的力,反映了分心的驾驶员握着方向盘的行为。
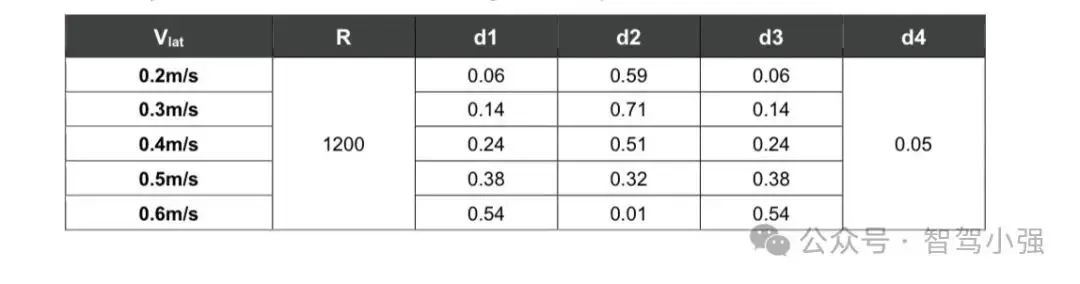
3.2.1 测试参数
3.2.2 以下图片详细说明了用于创建测试路径的参数:
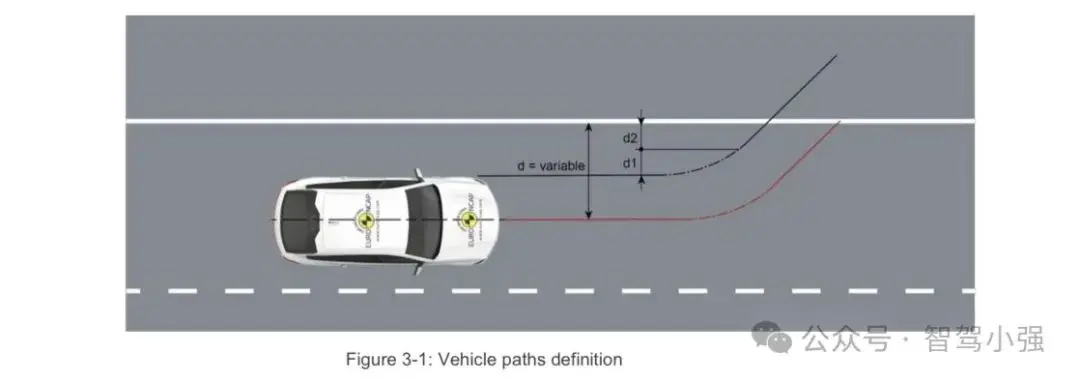
有关每个测试场景的测试路径的完整定义,详见第6章“车道偏离路径”。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
