




 广告
广告





















































不同力传感器介绍

根据GB/T 36378.1-2018《传感器分类与代码第1部分:物理量传感器》规定,力学传感器是指对如压力、重力、应力、力矩、位置、速度、加速度等参数进行测量的传感器,其中在在汽车、航空航天、机械制造、医疗等多个领域的应用中,通过将力/力矩转换为电信号以供系统使用的传感器称作力传感器。
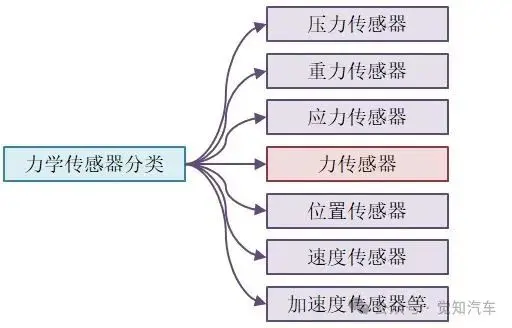
图1 力学传感器分类
力传感器按其对力/力矩的测量原理的不同,可将其分为应变式、压电式、电容式、光学式等数种类别,其中:
应变式力传感器是最常见的一种力传感器类型,它基于金属或半导体材料的电阻值随其形变而变化的性质。即当外力作用于传感器时,内部的应变片(通常是电阻丝或箔片)会发生形变,导致其电阻值发生变化,这种变化可以通过惠斯通电桥电路检测并转换成电压信号输出,这类传感器具有高精度、稳定性好、线性度高等优点。
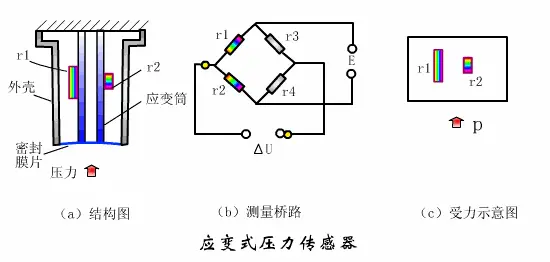
图2 应变式力传感器
压阻式力传感器利用半导体材料的压阻效应,即材料的电阻率随着施加的应力而改变。当外力作用于压阻元件上时,其内部的半导体材料会因应力而改变电阻,进而影响通过该材料的电流或电压。这种传感器通常用于需要高灵敏度和快速响应的应用场合。
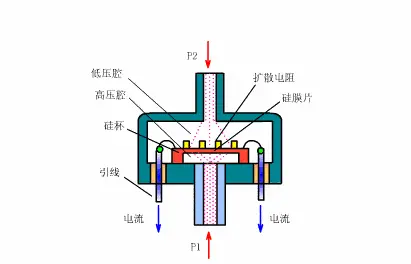
图3 压阻式力传感器
压电式力传感器在受到机械应力作用时会产生电荷,这种现象称为压电效应,其在应用过程中通过将外力直接转换成电荷或电压信号,从而实现对外力的测量,常见的压电材料包括石英、锆钛酸铅等。这类传感器响应速度快、灵敏度高,但需要额外的电荷放大器来处理输出信号。
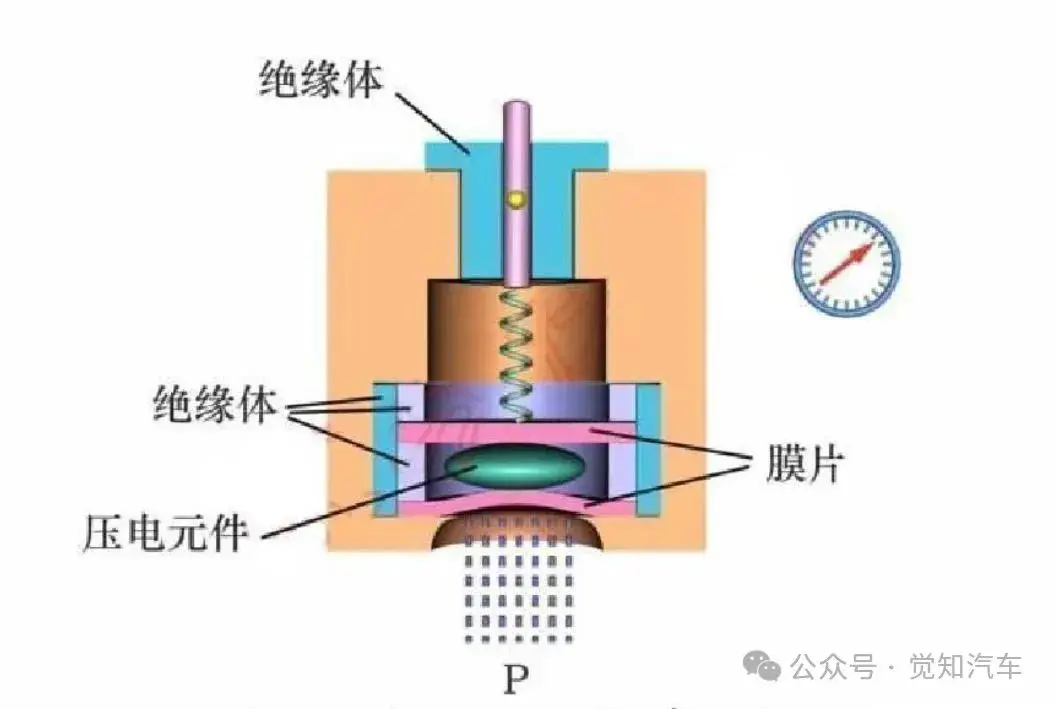
图4 压电式力传感器
电容式力传感器基于电容的变化来测量力。电容由两个平行的导体板组成,中间隔着一层绝缘介质,当外力作用于其中一个导体板时,使其与另一个导体板的距离发生改变时,此时电容值也会随之变化,这种变化可以转化为电信号输出。电容式传感器具有结构简单、动态范围大等特点
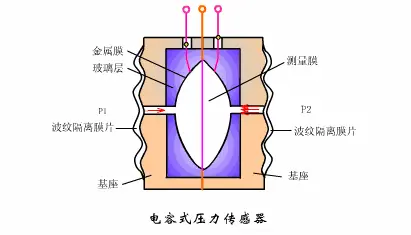
图5 电容式力传感器
光学式力传感器利用光的传播特性来测量力。当力作用于传感器时,会引起光纤弯曲或折射率变化,从而影响光的传输,通过检测光强、相位或偏振的变化,可以间接测量出作用力的大小。这类传感器通常具有高精度和抗电磁干扰的能力。
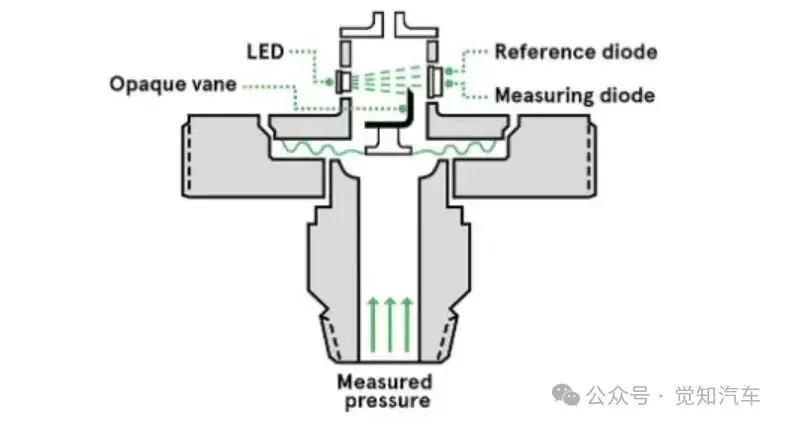
图6 光学式力传感器
对不同工作原理的力传感器对比如下:
表1 不同工作原理力传感器对比
力传感器类型
工作原理
精度
适用场景
特性
成本
应变式
利用金属或半导体应变片的电阻变化,通过弹性体的形变转换为电信号
高
静态和动态力测量
良好的线性度
较高
压阻式
半导体材料的压阻效应,应力引起电阻率变化
高
需要快速响应的动态力测量
快速响应
一般
压电式
晶体材料在受力时产生电荷
高
高频动态力和振动测量
自发电,无需电源
较高
电容式
力作用下改变电容器的电容值,通常通过改变极板间距实现
较高
触摸屏和触摸面板
小尺寸,高灵敏度
一般
光学式
利用光的强度、相位或偏振状态的变化来测量力
高
高温、高压或强电磁场环境
抗电磁干扰
高
力传感器按照其能够测量的力或力矩维度,可以分为一维、三维和六维力传感器,它们分别对应着不同复杂程度的应用需求。其中:
一维力传感器是最基本的类型,它只测量一个方向上的力,如垂直或水平的直线力。这类传感器广泛应用于各种场合(如拉伸和压缩实验中的力值测量)具有结构相对简单,成本较低的特点。
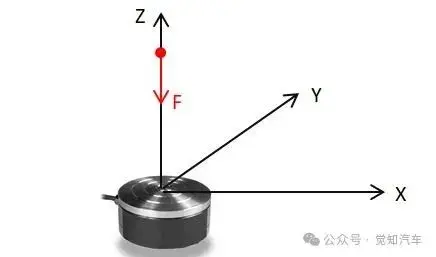
图7 一维力测量
三维力传感器能够同时测量三个互相垂直方向上的力,即X、Y和Z轴方向的力。这类传感器增加了复杂性,可以在机器人手臂的应用中,用于控制末端执行器的接触力,避免损坏或过度用力。相比于一维力传感器,三维力传感器可以提供更全面的力分布信息,适用于需要控制或分析三维空间中力的应用。
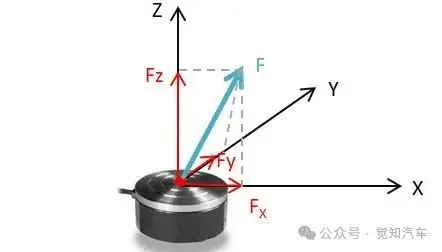
图8 三维力测量
六维力传感器是当下技术状态中最复杂的力传感器类型,它能够同时测量三个方向上的力(Fx、Fy、Fz)和绕这三个轴的力矩(Mx、My、Mz)。这种传感器主要用于需要精确控制和感知物体在三维空间中的所有自由度的应用。如在人形机器人的应用中,通过六维力传感器提供完整的力和力矩信息去实现高精度力控和复杂机械臂操作,从而实现精细的环境互动和物体操作能力。
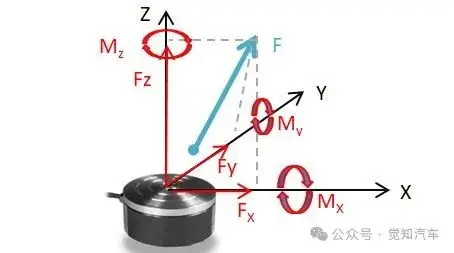
图9 六维力测量
对不同维度力传感器特性整理如下:
表2 不同维度力传感器特性
一维
三维
六维
测量维度
Fx
Fx, Fy, Fz
Fx, Fy, Fz, Mx, My, Mz
主要应用领域
压力测量、拉力测试
机器人、材料测试、生物力学研究
高级机器人、航空航天、精密装配
复杂度
低
中
高
精度要求
一般
高
极高
成本
低
一般
高
数据处理难度
低
中
高
在汽车行业中,力传感器的应用场景多样,其中,一维力传感器在车辆制动系统中可用于测试和监测制动系统的压力,确保制动效能符合安全标准。在发动机测试中,通过测量活塞或曲轴的轴向力,可以评估其内部机械部件的负荷和磨损情况。还可在胎压监测系统(TPMS)中用于监测轮胎内部的压力,防止爆胎或非正常磨损,从而提高行车安全性。
三维力传感器可在汽车碰撞测试中,用于测量碰撞瞬间车身各部位承受的力。在悬挂系统的开发和调校过程中,可测量悬挂组件在不同路况下的受力情况,从而优化驾驶舒适性和操控性。在底盘测试中,可用于分析车辆在转弯、加速和制动时的受力情况。
六维力传感器可以监测车辆底盘在行驶过程中受到的各种力和力矩,如垂直力、侧向力、纵向力、滚动力矩、俯仰力矩和偏航力矩等。在轮胎与路面的摩擦力和附着力研究中,六维力传感器的应用可为系统提供详细的动态交互数据。在自动驾驶中,可用于精确测量车辆与周围环境的物理交互,从而确保自动控制的精度和安全性。
- 下一篇:长沙将发放首批功能型无人车示范应用编码
- 上一篇:新实施│轮胎3C认证规则



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
