




 广告
广告





















































ENCAP2026对车道偏离碰撞避免的要求(下)

1.背景、定义&测试设备
2.测试程序
3.测试执行
4.评估标准和评分
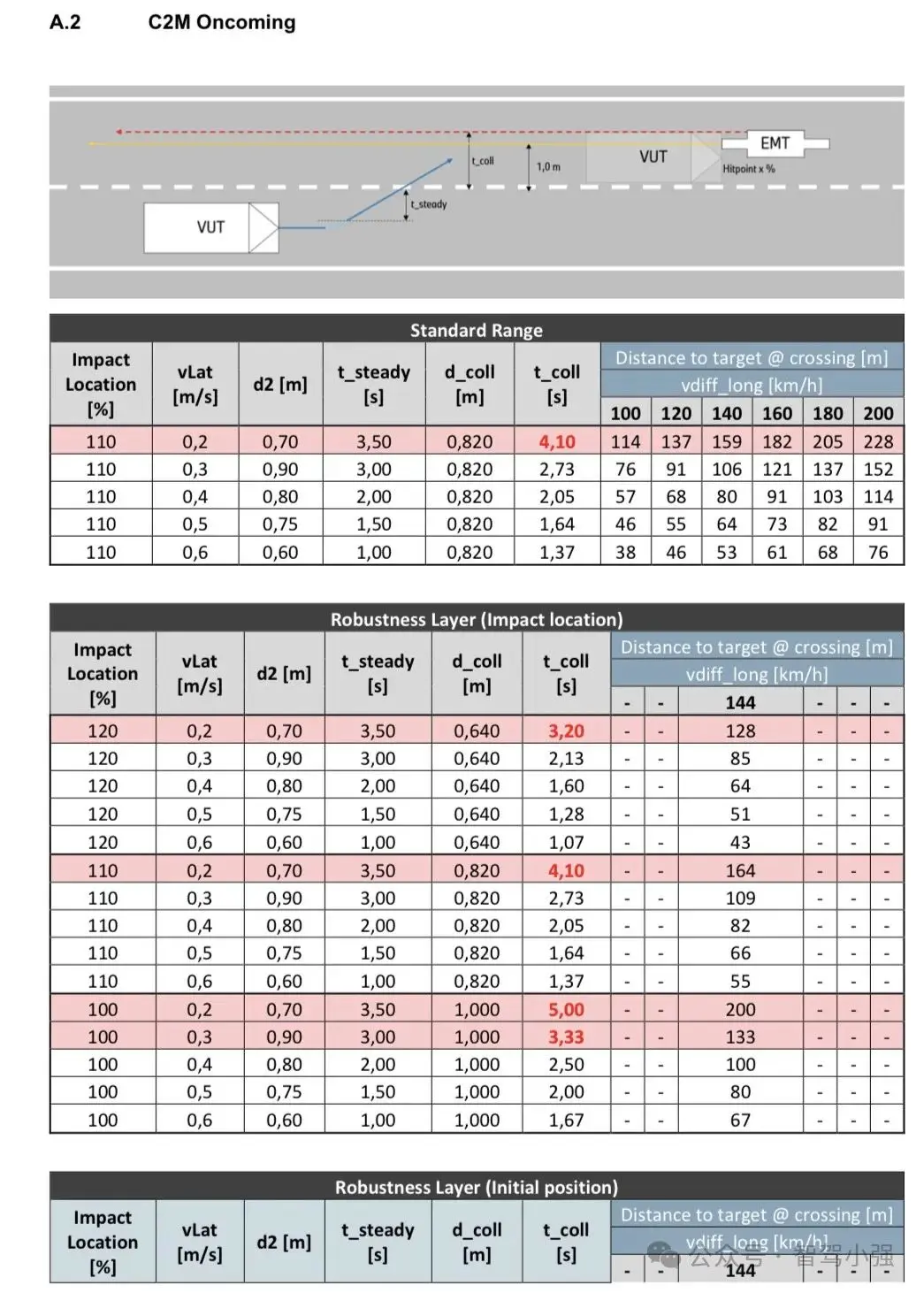
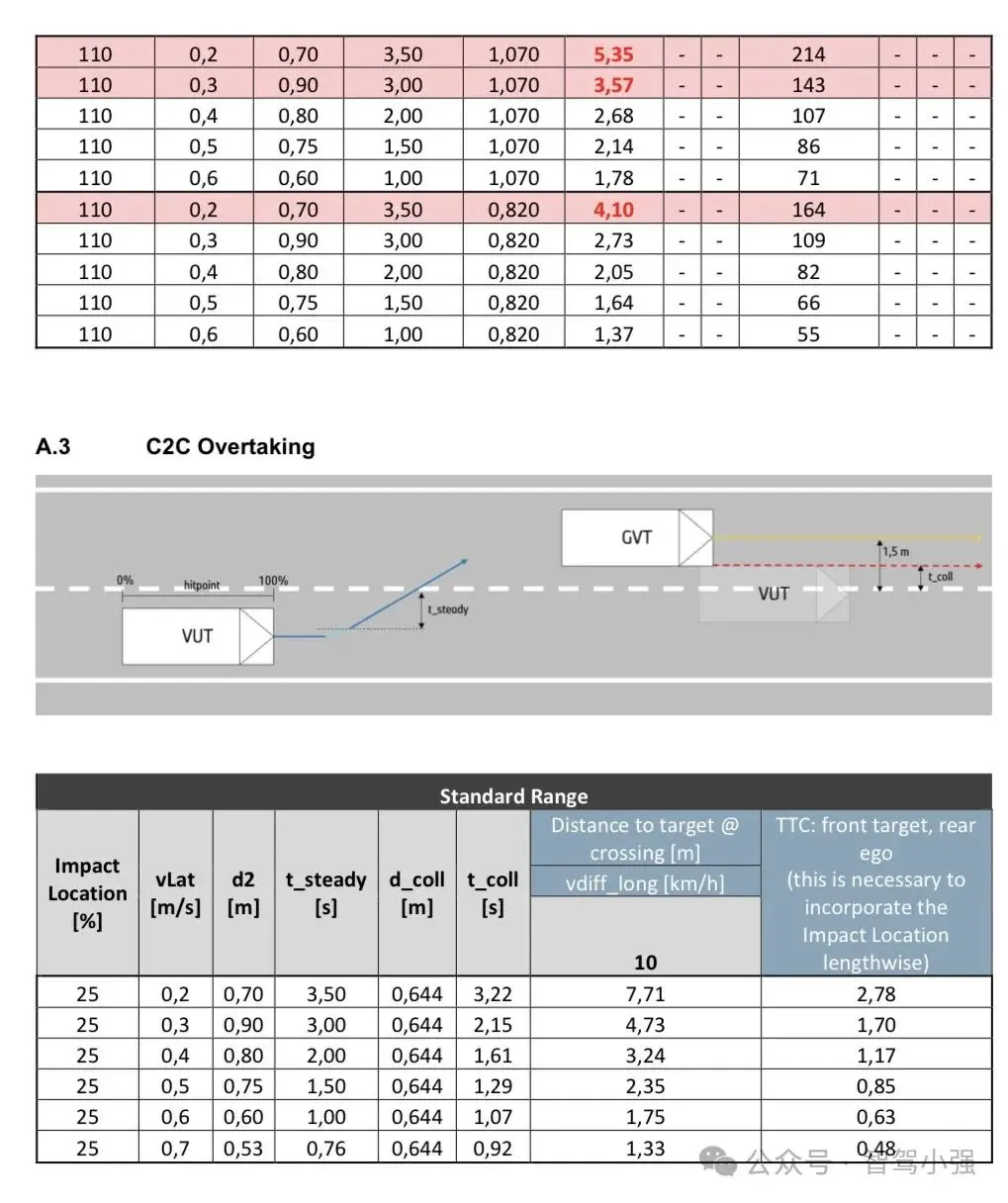
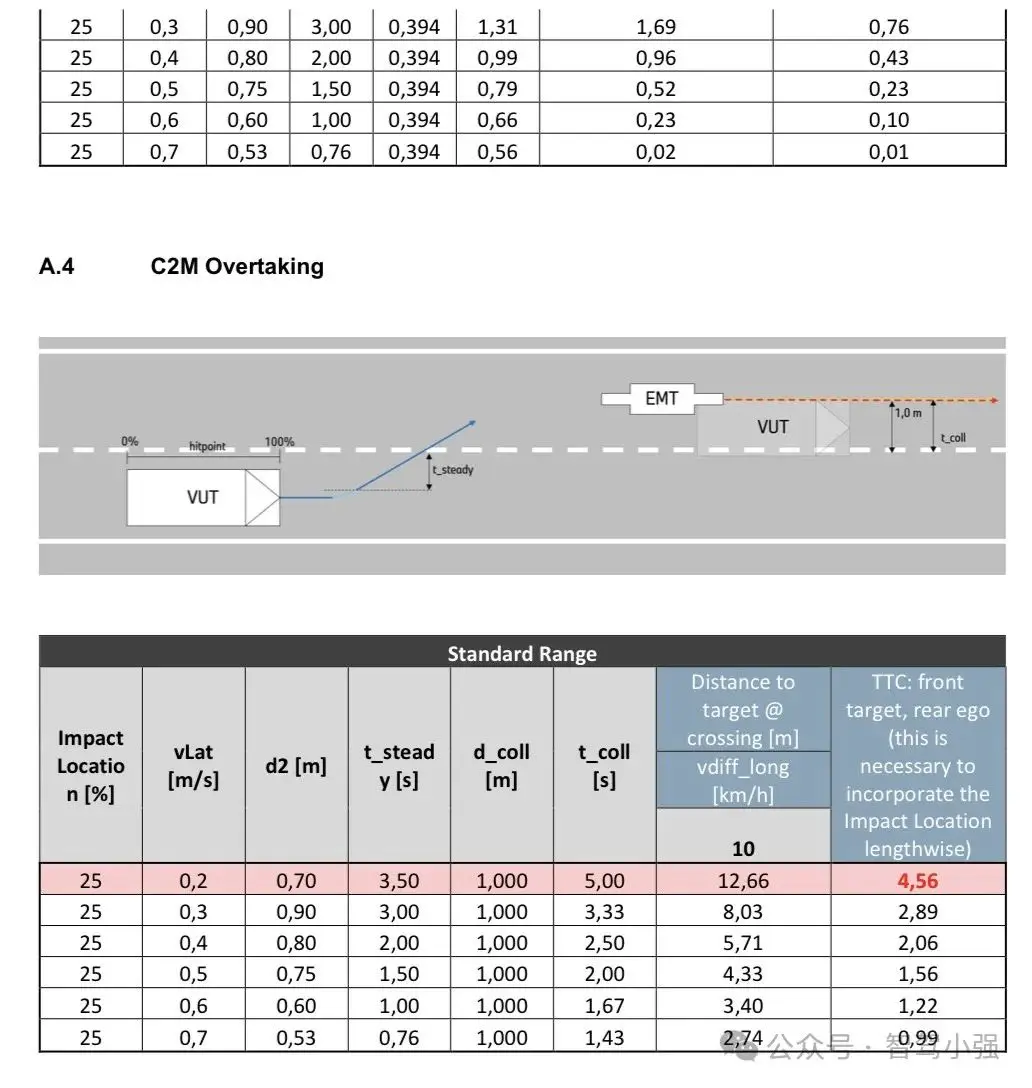
5.对向来车&超车测试用例
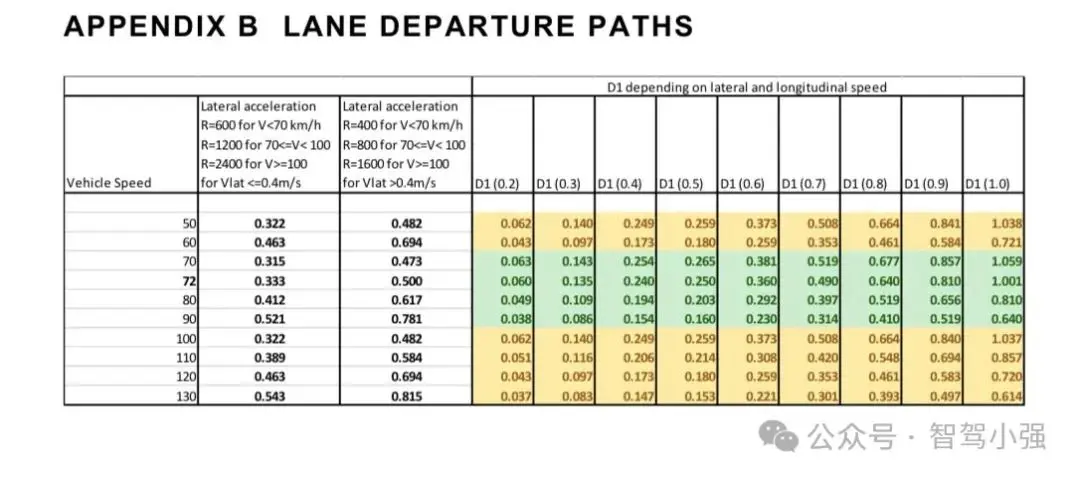
6.车道偏离路径
4.评估标准和评分
4.1 一般要求
4.1.1 驾驶员接受性
驾驶员接受 - 可驾驶性规定的要求适用于车辆的车道支持系统LSS的整个运行速度。ENCAP将在标准范围纵向速度内进行的所有测试中监控这些指标的性能;并且还可能进行抽查,以验证每种场景的标准和扩展范围以外的速度的性能。
要有资格在驾驶员状态链接中得分,系统应满足可驾驶性的要求。
4.1.2 车道偏离
要有资格在车道偏离中得分,LSS系统的ELK功能需要在每次旅程开始时默认开启,并且不能通过短暂的单次按下按钮来停用系统。
对于任何系统,驾驶员必须能够覆盖override系统的干预。
4.2 评估方法
车辆制造商应向ENCAP提供详细“说明LSS系统在所有测试场景中预测性能”的数据。预测性能将作为参考,以确定预测结果和测试结果之间的差异。
本评估中的每个场景(驾驶员接受度除外)由一个结合了车辆和目标纵向速度以及车辆横向速度范围的矩阵组成。矩阵中的每个组合都被称为网格单元格。形成测试场景矩阵的网格单元被分为两组:标准范围和扩展范围。
4.2.1 标准范围 对于标准范围内的得分计算,每个网格单元格的最大得分为1分。积分的授予方式如下:
车辆和摩托车:
PASS(避撞):1分
FAIL(碰撞):0分
单一车辆,横向速度Vlat从0.2到0.6m/s:
ELK(PASS):1分
ELK(FAIL):0分
然后将各场景测试范围的总分归一化为该场景标准测试范围的最大可用分数(四舍五入到小数点后一位)。
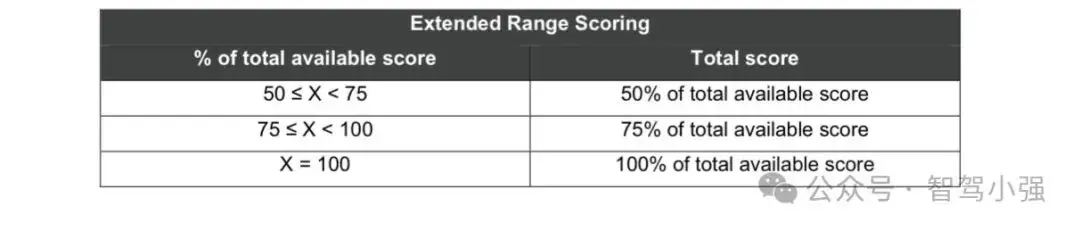
4.2.2 扩展范围
要获得扩展范围内的得分资格,标准测试范围至少需要获得可用总分的50%。
对于在扩展范围内的得分计算,根据车辆制造商的预测,每个通过验收标准的网格单元格都会获得0.5分或1分的分数。积分的授予方式如下:
车辆和摩托车:
PASS(避撞):1分
盲区监测BSM:0.5分
FAIL(碰撞):0分
单一车辆,横向速度Vlat从0.2到0.7m/s:
ELK(PASS):1分
LDW(PASS):0.5分
LDW&ELK(FAIL):0分
然后,将扩展范围中求和的分数归一化为每个场景的每个标准范围的最大可用分数(四舍五入到百分位)。
在任何给定场景中,每个扩展范围的总分计算如下:
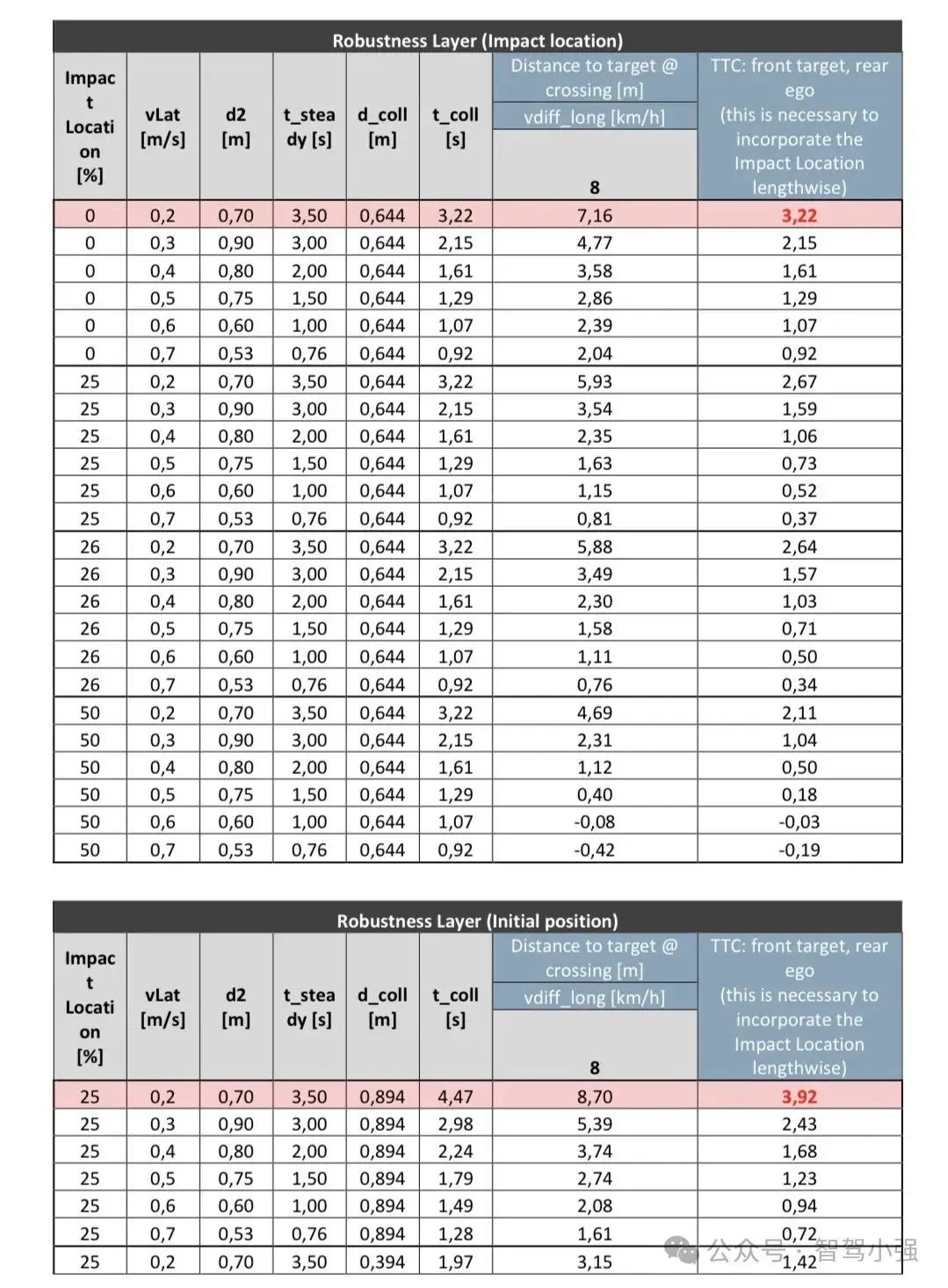
4.2.3 鲁棒性
为了有资格在各个场景的鲁棒性层中得分,需要在标准测试范围内获得总可用得分的≥50% 在任何给定场景中,每个鲁棒性层的分数计算如下:
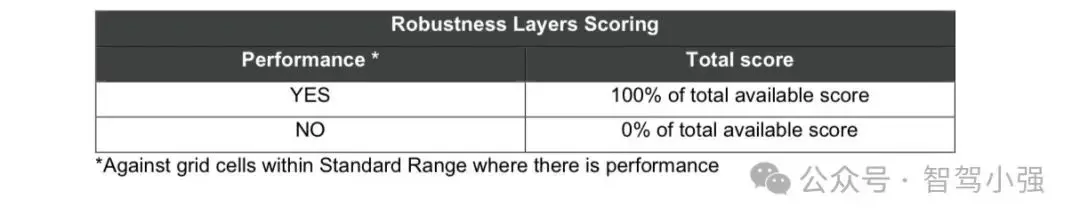
*鲁棒性层只针对标准范围内具有性能的网格单元
4.2.4 验证测试
[验证测试的确切数量和验证测试的总体验收标准仍有待与工作组商定]
4.3 评估标准
4.3.1 单一车辆
4.3.1.1 驾驶员可接受性
驾驶员可接受性最多5分:可驾驶性2分,驾驶员状态链接3分。
4.3.1.2 可驾驶性
LSS系统应满足以下条件,才能在可驾驶性方面得分:
a)超越扭矩:当车道支撑系统处于激活状态时,转向机器人为保持方向盘角度而施加的扭矩不得超过3.0Nm+[0.5Nm]。
如果车道支撑系统LSS通过驾驶员意图监控(DIM)策略受到抑制,则此KPI不适用。
b)持续干预:车辆的车道支撑系统不得试图干预驾驶员的意图超过3秒。
如果车道支撑系统LSS通过驾驶员意图监控(DIM)策略受到抑制,则此KPI不适用。 c)转向速度:对于≥70km/h的测试,车道支撑系统不得提供导致方向盘转速超过下表中定义的极限的航向校正。

由测试实验室自行决定,转向速度限制从转向机器人进入开环或从VUT达到测试选定的Vlat开始。 d)纠偏速度Vlat:对于Vlat>0.3m/s的每个测试,车道支撑系统应重定向VUT,以便校正导致返回的横向速度小于或等于测试的目标Vlat。返回Vlat的测量将在最大DTLE后两秒进行。对于Vlat ≤0.3m/s的测试场景,返回的Vlat应≤0.3 m/s。
如果车辆不符合这些标准,或者如果指标与VUT的车道支撑系统(例如差速制动系统等)不兼容;汽车制造商可以向ENCAP秘书处提出上诉,说明车道支撑系统设计避免了严厉或突然的干预,并且对驾驶员来说是可接受的。
基于这一理由,ENCAP秘书处可能会推翻可驾驶性评估。
4.3.1.3 驾驶员状态链接
为了能够在驾驶员状态链接中得分,应满足以下条件:
a)如ENCAP驾驶员在环监控中所述,LSS系统的警告和干预灵敏度应根据DSM检测到的驾驶员状态而变化。
b)DSM应在不同的驾驶员状态中提供以下最低性能,具体如下:
长时间分心、短时间分心、电话使用:分别≥总干预分数的50%;
受损驾驶(嗜睡); 睡眠(如果没有可用的横向和纵向联合控制)。
c)如果DSM降级、无法使用或关闭,灵敏度变化应立即恢复到标称值。
当驾驶员被归类为分心和/或受损时,LSS灵敏度变化应确保LKA和LDW的可用性,当司机被归类为专注(眼睛在路上)和非受损时,部分或完全抑制干预。
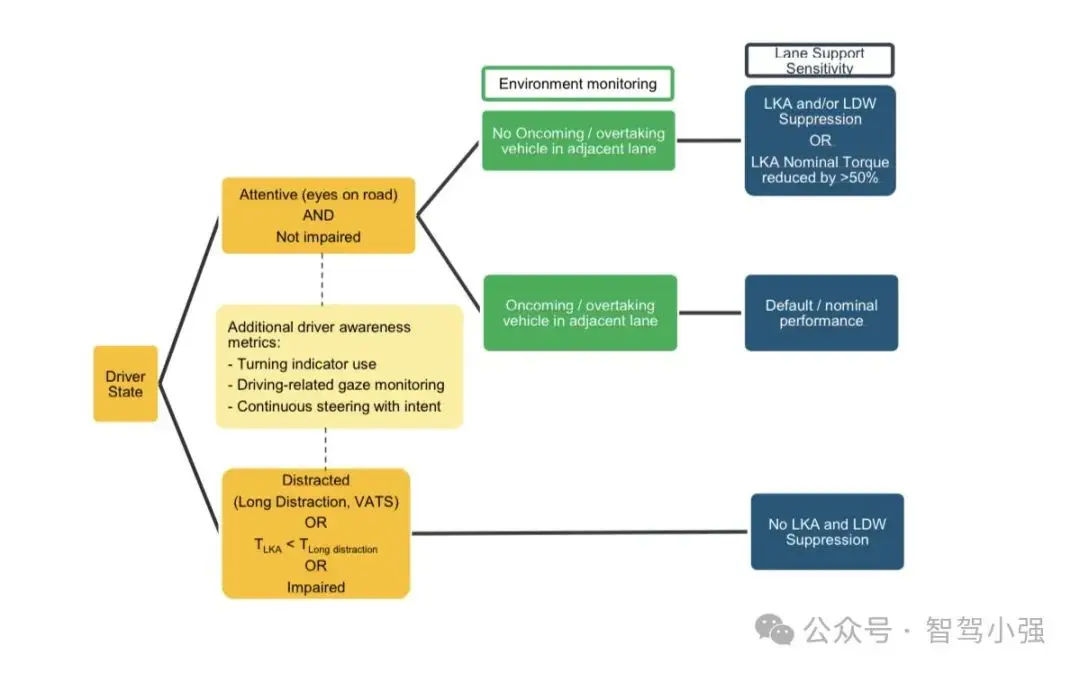
注意力指标awareness metrics:表明示驾驶员对车道中车辆位置的意识的特点条件。允许OEM根据以下条件实施特定的车道支持灵敏度变化:
a)转向指示器的使用:例如,推翻LKA对先前被评估为受损的驾驶员的干预
b)视线监控:特定车道支撑灵敏度取决于驾驶员的视线方向,例如:
凝视中央向下区域(例如,车内信息娱乐系统):漂移到左侧或右侧车道边界的车辆的前方支撑灵敏度变化;
向右侧区域凝视(例如,乘客侧后视镜):漂移到左侧车道边界的车辆的车道支撑灵敏度变化; 向左侧区域凝视(例如,驾驶员的窗户):漂移到右侧车道边界的车辆的车道支撑灵敏度变化。
对于横向支撑灵敏度,应激活干预策略:
最迟当驾驶员状态被归类为瞬态时; 如果LKA干预的预估时间比长时分心的时间短(TLkA < TLong),则在任何连续远离前方道路视野的长时分心开始后≤ 1s。
4.3.1.4 车道偏离
4.3.1.5 路缘
车道偏离-路缘测试中DTLE的极限值设置为-0.1m,这意味着只允许车辆前轮的一部分在道路边缘之外。
4.3.1.6 车道偏离警告
如果测试车辆无法满足车道偏离-路缘测试的扩展范围的评估和性能标准,则车辆有资格获得车道偏离警告的评估。
在以至少0.7m/s的横向速度激活时,在-0.1m的DTLE之前,LDW系统发出的任何与驾驶员注意到车辆横向控制(例如显著的转向校正、方向盘振动等)明确相关的触觉警告,可以获得积分。
4.3.2 汽车和摩托车
4.3.2.1 ELK Oncoming&Overtaking
对于所有ELK车对车和车对摩托车的对向来车和超车测试,使用的评估标准是“无碰撞”,这意味着VUT不允许在测试期间的任何时间接触被超车或迎面而来的车辆目标。
对于摩托车手来说,在整个测试期间,VUT和迎面而来或被超车的EMT之间的横向分离都必须>0.3m。
4.3.2.2 盲点监控BSD
如果测试车辆无法满足ELK超车(汽车和摩托车骑手)测试场景中扩展范围的评估和性能标准,则测试车辆有资格获得盲点监测系统的评估。
对于盲点监测测试,所使用的评估标准是针对VUT盲点中的车辆提供的视觉盲点信息。
4.3.3 鲁棒性
为了评估系统的整体鲁棒性,在每个场景的标准范围内(在有性能的前提下)根据称为鲁棒性层的单个参数或条件变化进行评估,这些鲁棒性层聚集在3中类型中:VUT、目标和环境。
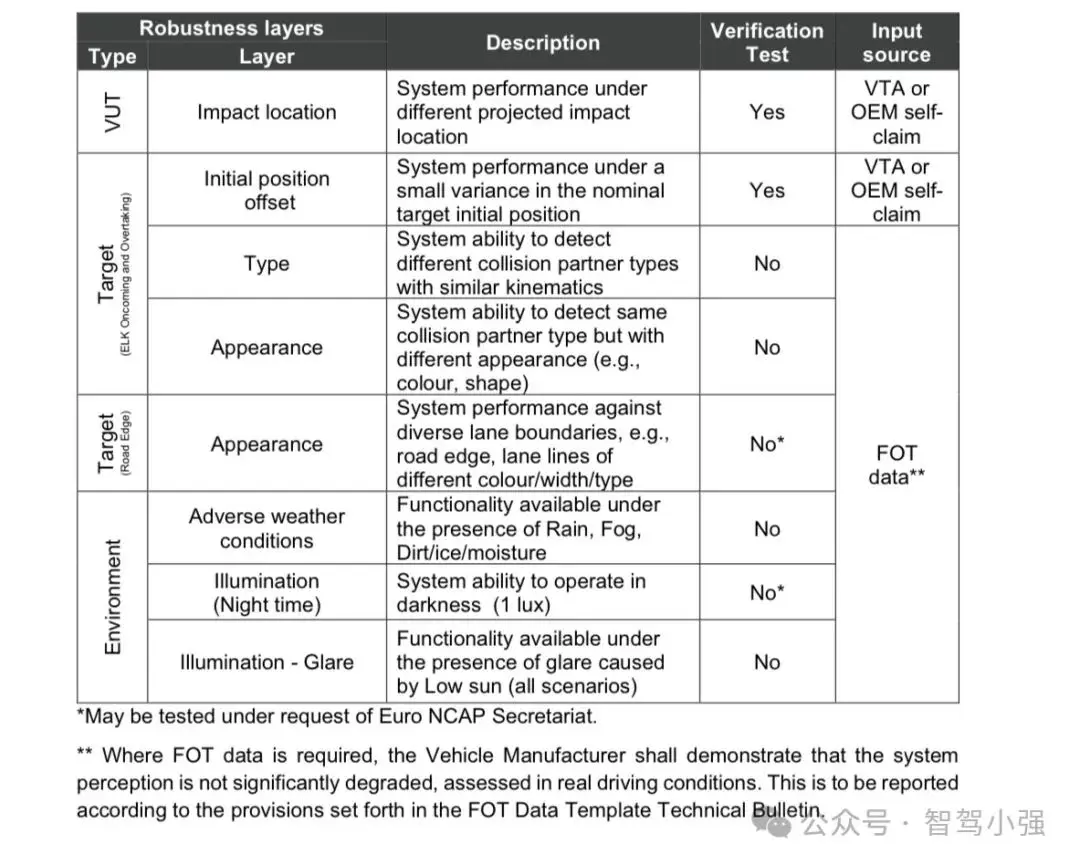
*可应ENCAP秘书处的要求进行测试。
**在需要FOT数据的情况下,车辆制造商应证明在实际驾驶条件下进行评估时,系统感知没有明显退化。这将根据FOT数据模板技术公告中的规定进行报告。
4.3.3.1 验证测试 进行验证测试时,适用以下条件:
*与标准范围内使用的条件相比。**参数组合应确保TTC ≤ 3s(见4.4)。
4.4 评分
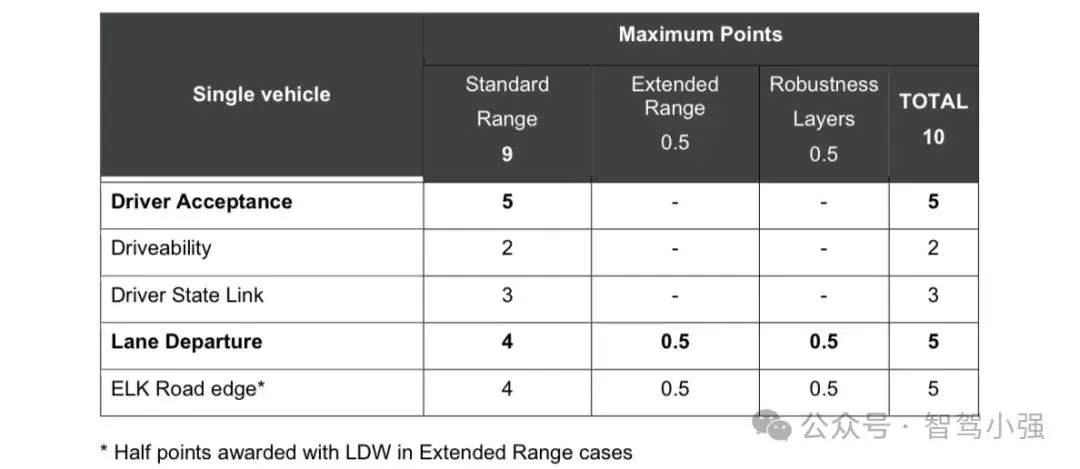
4.4.1 单一车辆
单一车辆的分数分布总结如下表所示:
4.4.2 车辆和摩托车
车辆和摩托车的分数分布总结如下表所示:
*扩展范围内,BSD可以获得一半的分。
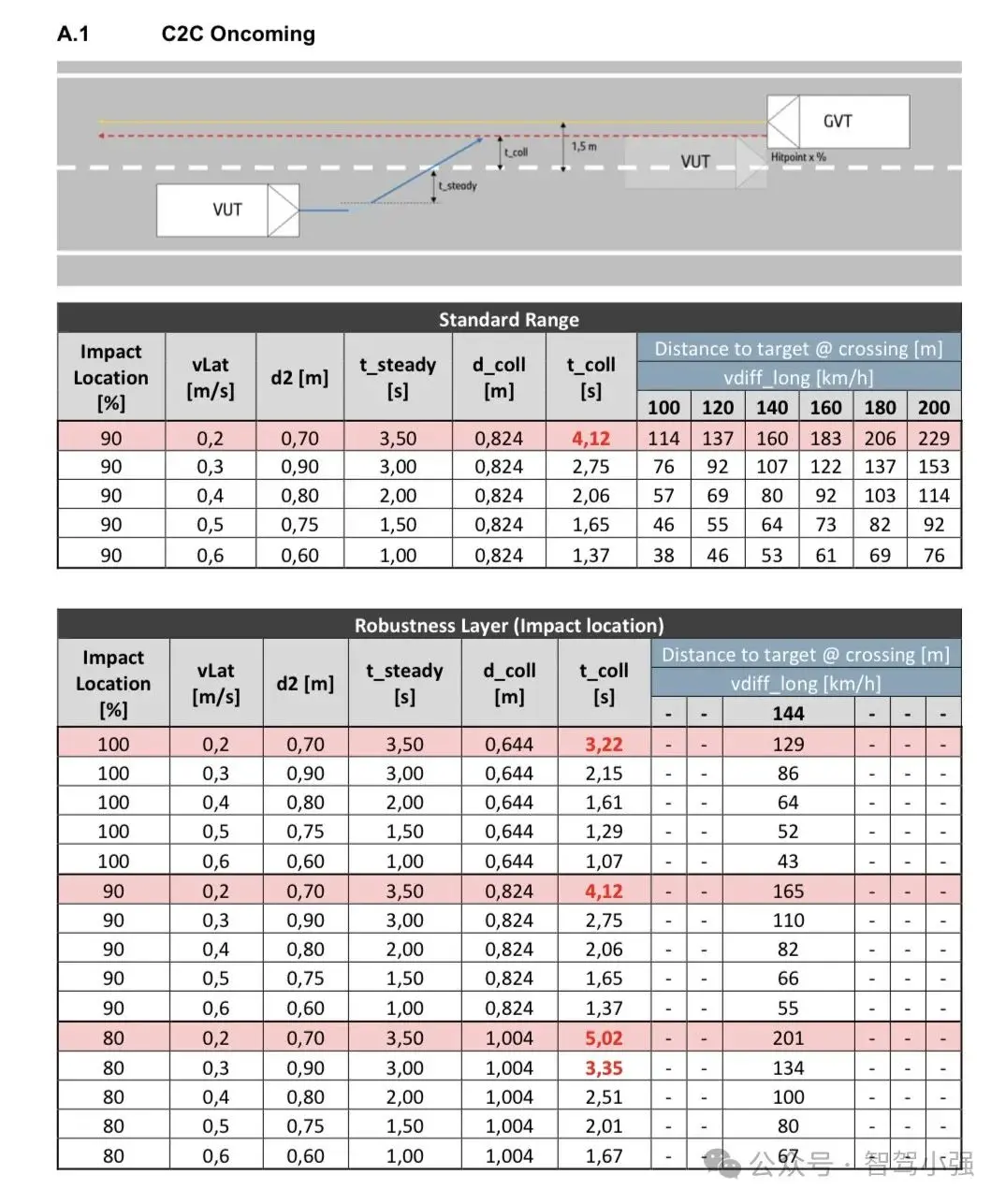
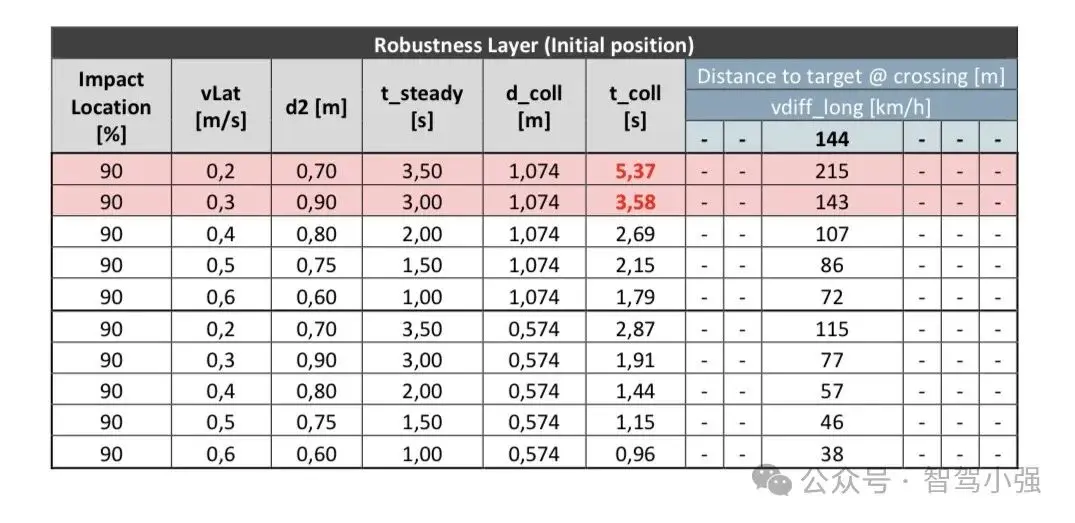
5.对向来车&超车测试用例
6.车道偏离路径
- 下一篇:基于ABAQUS的盘式制动器有限元分析
- 上一篇:基于阶次分析和齿轮重合度优化的分析



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
