




 广告
广告





















































自动驾驶中视觉感知ISP调参综述及实证分析

为什么在观看应用中要使用锐化呢?人类视觉系统对图像中的边缘和精细细节高度敏感,并且善于通过调整来区分对比度不同的线条。边缘和细节主要存在于高频部分。然而,相机是由有限数量的像素构成的,这意味着在一幅图像中,只有有限频率的数据能够被充分捕获并呈现出来。在图像中,物体之间的边界之所以能被察觉,是因为存在强度变化(强度变化越剧烈,图像就越清晰)。相邻像素之间的强度变化与图像的导数(空间微分)有关。锐化被广泛用于对模糊图像进行后处理,通过增强强度变化的幅度来实现。增大暗区和亮区之间的差异能够突出边缘。在广角视场(FOV)镜头图像中,锐化可能是有益的,因为它可以对光学传递函数(OTF)起到补偿作用。在这种情况下,图像边缘部分分辨率会降低,而锐化可以改善这一情况。
所采用的技术:使用了两种技术来锐化图像。这两种技术都应用了不同的参数。第一种技术是使用拉普拉斯滤波器来增强高频区域中包含的精细细节。这些滤波器核的设计目的是相对于原始像素提高中心像素的亮度。拉普拉斯算子(L4 和 L8)是对图像二阶空间导数的二维等距度量:
使用的第二种技术是透明掩蔽(USM)。它使用原始图像的一个未锐化(模糊的)负图像掩模,通过每像素加权和与正原始图像相结合,以创建一个锐化版本。在这里,我们使用一组不同大小的高斯核(3×3,9×9和19×19)来创建模糊图像,并对模糊图像使用0.5的权重。图9(左图:拉普拉斯式,右图USM)显示了过滤器的应用。
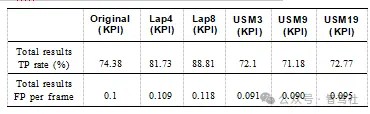
图9.锐化方法|左:使用拉普拉斯滤波器/右:使用USM
视觉分析:这两种技术已经应用于图像。所有输出更清晰,真空度增强,因为原始模糊似乎被删除。从视觉的角度来看,可以观察到用拉普拉斯滤波器锐化的图像比用USM锐化的图像噪声更大。每次处理后出现,但在拉普拉斯图像中更明显。在边缘检测方面,用拉普拉斯算子锐化的图像中的噪声在某些情况下被检测为边缘,这与USM产生的“晕”伪影相反,因为它们不够强,不能被检测为边缘。通过二值化得到的结果与之前的观察结果相似,因为原始的二值化图像与超二值化图像的锐化图像之间没有很大的差异。用拉普拉斯滤波器锐化的图像的噪声是明显的。由于对二值化图像进行形态学闭合操作,也得出了类似的结论。(视觉差异:图10)。
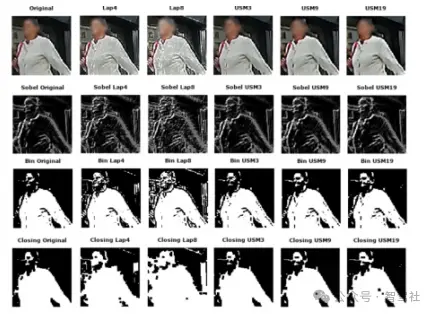
图 10. 采用不同参数设置锐化后的图像示例
通过观察特征检测器给出的结果可以发现,锐化对特征检测有影响。将原始图像与经拉普拉斯滤波生成的图像进行匹配,内点的占比总是更低。我们的测试结果表明,高反差保留(USM)方法对性能可能会产生正向或负向的影响(见图 11)。
定量分析:如前文所述,已针对 20 个视频样本集计算了关键性能指标(KPI)值。表 1 以及图 12 中的受试者工作特征(ROC)曲线展示了两种锐化技术所获得的结果。通过对比未处理视频和经过锐化处理的视频之间的关键性能指标(KPI)值,可以观察到拉普拉斯滤波器提升了关键性能指标(KPI)值:在每帧误报数(FP)与原始测试值大致相同的情况下,拉普拉斯 8(Lap8)提升了 14.43%,拉普拉斯 4(Lap4)提升了 7.35%。用于高反差保留的三种配置则得出了相反的结果(真阳性百分比更低)。从视觉上看,与会出现大量噪声和光晕伪影的拉普拉斯滤波相比,高反差保留技术生成的图像效果更好。这凸显了在视觉上对人类视觉有吸引力的东西,对计算机视觉算法而言未必是好的(见图 13)。
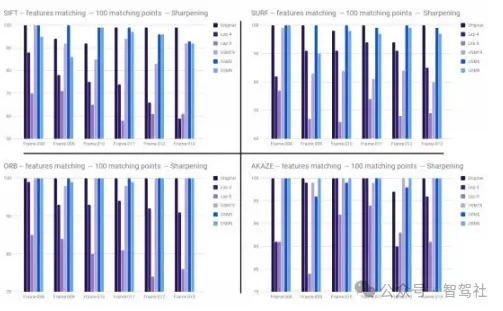
图11.根据SIFT、SURF、ORB和AKAZE的帧和锐化技术的倾斜百分比
- 下一篇:鱼眼相机在自动驾驶环境感知的应用和挑战
- 上一篇:双电机驱动技术



编辑推荐




最新资讯
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
-
NOA该允许驾驶员脱手么?
2025-04-02 08:37
-
联合国最新汽车法规清单(到R176)
2025-04-02 08:31
