




 广告
广告





















































法规标准-UN R171标准解读

1.驾驶员应能随时将系统切换到“OFF”模式
2.当驾驶员关闭系统或其某个功能时,系统或功能应分别进入“OFF”模式
3.当系统或其功能评估为不再满足保持“Active”模式的先决条件时,系统或功能应通过转换到“Standby”模式或将系统或功能切换到“OFF”模式来安全及时地终止控制输出,除非本法规另有明确规定4.如果车辆在紧急安全系统(如AEBS)的干预下停止,则系统不得在没有驾驶员输入的情况下恢复纵向控制
驾驶员超控
1.选项1:驾驶员输入的制动控制导致比系统引起的更高的减速,应覆盖与系统执行的纵向距离控制相关的任何功能。对于驾驶员低于3.5m/s2的减速需求,系统可以继续提供辅助。对于驾驶员更高的制动需求,如果没有驾驶员的单独操作,系统不应在此类覆盖后恢复辅助
2.选项2:驾驶员输入的制动控制导致比系统引起的更高的减速,应覆盖与系统执行的纵向距离控制相关的任何功能。对于驾驶员要求的减速低于2m/s2,如果车辆的其他纵向辅助功能(例如 ACC、CC)正常工作,系统可以继续提供辅助。对于驾驶员更高的制动需求,如果没有驾驶员单独操作,系统不应恢复辅助
3.选项3:驾驶员输入的制动控制导致比3.5m/s2更高的减速度时,应覆盖由系统提供的纵向控制辅助。如果没有驾驶员的单独操作,系统不应在覆盖后恢复辅助。对于驾驶员要求的减速度低于3.5m/s2,系统可以继续以减速度要求达到的速度提供辅助。对于减速度要求低于1m/s2,系统可能会恢复到输入之前的速度。但是,驾驶员应能够选择通过向制动控制系统输入来覆盖由系统提供的纵向控制辅助,从而导致由系统引起的更高减速度
4.选项 4:驾驶员输入的制动控制导致比系统当前引起的减速更高的减速,应优先于系统提供的纵向控制辅助。对于驾驶员的减速要求高于3.5 m/s2,系统不得在驾驶员单独操作后恢复辅助。对于驾驶员的减速要求,不高于3.5 m/s2,但不低于1m/s2,系统应继续以减速要求达到的速度提供援助。对于低于1m/s2,系统应返回输入前的速度
5.驾驶员通过任何制动系统(如驻车制动器)对制动控制的输入,以保持车辆静止,应覆盖与系统执行的纵向控制相关的任何功能
6.驾驶员输入的加速度高于系统产生的加速度时,系统提供的纵向控制辅助将被驾驶员输入的加速度所取代。系统应根据当前最大速度恢复纵向控制辅助
7.驾驶员的转向输入应覆盖与系统执行的横向控制辅助相关的任何功能。转向控制所需的力不应超过50N。该系统可能允许驾驶员进行轻微的横向修正(例如,避免坑洼)
8.当系统执行操作时发生驾驶员超控时,操作应终止,除非转向输入支持预期操作和/或提供轻微横向修正
9.系统不再允许提供纵向或横向辅助以响应驾驶员超控,制造商应实施策略以确保这些操作阶段的可控性(例如,在检测到驾驶员在操纵上脱离时不终止横向控制)
驾驶员信息、驾驶员脱离和警告策略
驾驶员信息
1.系统应通知或警告驾驶员:
(a) 系统或功能的状态:“Standby”模式(如适用)、“Active”模式;
(b) 正在执行的操作;
(c) 驾驶员需要执行的特定操作(例如,采用控制、检查间接视觉设备);
(d) 如果在“Active”模式下,系统检测到已达到当前相关的系统边界,除非(a)已经指示;
(e) 检测到即将到来的系统边界;
(f) 检测到影响系统或其功能的故障,除非系统处于“OFF”模式;
(g) 预期驾驶员确认或系统启动的操纵
(h)操作状态,包括启动、取消或车辆在操作过程中被迫停止后是否重新开始
2.系统信息和信号应明确、及时,不得造成混淆
3.系统的信息和信号应针对特定情况使用单独或适当组合的视觉、音频和/或触觉反馈
4…如果并行提供多个消息或信号,则应按紧急程度对其进行优先级排序。应给予安全相关信息和信号最大的紧迫性
5.系统的信息和信号的设计应积极鼓励驾驶员了解系统的状态、功能以及驾驶员的任务和责任
6.系统的信息和信号应鼓励驾驶员理解系统的预期控制输出
7.系统的整体状态指示应与车辆上配备的任何自动驾驶系统的状态指示明确区分开来
8.驾驶员确认操纵的系统信息和信号:
——系统应直观地通知驾驶员建议的操纵。如果是一系列操作的通知,则应是驾驶员可理解的组合和连接的系列。制造商应向型式认证机构解释提供此信息的时间,以确保驾驶员做出适当的反应
——方向指示器不得用于通知计划的操作
——系统的信号和信息的设计应避免驾驶员过度依赖或误用
9.系统启动操纵的系统消息和信号:
——该系统的目标是在相关动作开始前提供信息,并提供足够的通知,让司机了解动作和交通情况,同时考虑到动作的复杂性和在场其他道路使用者的数量。如果存在即将发生碰撞的风险,或者与正在进行的操作信息相冲突,则可以缩短时间,系统将尽可能提前直观地通知驾驶员。此外,除非系统评估驾驶员已观察到视觉信息,否则变道程序的启动应由另一种模式宣布
——如果某个功能处于“Passive”模式,系统将通知驾驶员,该功能在"Active"模式下是否可以执行由系统启动的操作
驾驶员状态监测和警告策略
1.该系统应配备适当检测驾驶员脱离的装置
2.系统应监测驾驶员是否在运动上(即手在转向控制上)和视觉上(例如凝视方向和/或头部姿势)脱离
3.如果检测到视觉脱离确定暂时不可用,系统不应引导车辆离开其当前行驶车道
4.警告应指导驾驶员采取必要的行动,以支持适当地参与驾驶任务
5.系统的警告和升级策略应考虑并优先考虑同时激活的紧急辅助系统的警告策略(例如AEBS)
警告类型脱手警告(HOR)1.HOR应至少包含类似于以下示例所示的连续(连续或间断)视觉信息:
2.HOR,至少,当驾驶员不再处于脱手状态时,应视为确认
脱眼警告(EOR)
1.EOR除非可以确保驾驶员已经观察了视觉信息,否则视觉信息应结合至少一种其他清晰且易于感知的形式
2.EOR,至少应,当驾驶员不再目视脱离时,视为确认
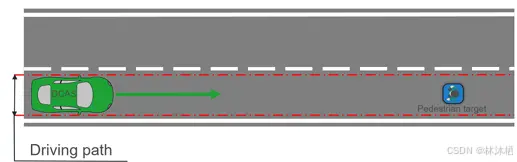
接管请求(DCA)
1.DCA应明确而醒目地指示驾驶员立即恢复对车辆的至少横向控制。它应包括视觉警告和至少一种其他模式,这些模式应清晰且易于感知
2.DCA,至少应,当驾驶员在没有DCA要求的任何持续横向辅助的情况下控制车辆时,被视为确认
脱手监测
1.当驾驶员将手从转向控制装置上移开时,驾驶员应被视为脱离
脱眼监测
1.驾驶员状态监控系统应基于对驾驶员目光的检测,至少检测到驾驶员的视觉脱离状态。如果无法确定驾驶员的目光,或者头部姿势可以更快地确定驾驶员是否脱离状态,也可以使用头部姿势
2.当驾驶员的视线和/或头部姿势(视情况而定)偏离与当前驾驶任务相关的任何区域时,应视为驾驶员视觉脱离
3.如果驾驶员的视线或头部姿势根据情况被重新指向任何当前驾驶任务相关区域足够长的时间,则驾驶员应被视为视觉参与或重新参与。持续时间至少为200ms
4.虽然系统能够执行系统启动的操作,但驾驶员不应被视为仅通过视觉或持续的头部姿势接合或重新接合
5.该系统的设计应解决对驾驶员随后多次短暂注视或头部姿势的检测和响应(例如增加重新接合时间和/或立即发出EOR)。该功能应由制造商记录并向型式认可机构解释
警告升级序列
脱手警告
1.当速度超过10公里/小时时,当驾驶员被视为在驾驶时脱离驾驶超过5秒时,应最迟发出HOR。但是,只要系统能够确认驾驶员没有在视觉上脱离,HOR可能会延迟长达5秒
2.在持续脱离接触的情况下,应在最初的等待后最迟10秒升级等待请求。升级后的HOR应包含额外的声学和/或触觉信息
3.系统设计应避免误用(例如,在没有按照系统要求手动接合的情况下,对 HOR 做出回应,轻推方向盘)
脱眼警告
1.在车速超过10公里/小时时,最迟应在驾驶员视觉脱离5秒后进行EOR
2.在 EOR 后,如果驾驶员通过注视任务区域200ms方式重新接合,并在 2 秒内再次被视为视觉脱离,则应立即发出 EOR
3.在持续视觉脱节的情况下,根据警告策略,在初始 EOR 后至少 3 秒内,将 EOR 升级到更高一级,并增加强度。升级的 EOR 始终包含声音和/或触觉信息
接管请求
1.在EOR升级警报后的最晚5秒内,应向驾驶员提供DCA
切换到驾驶员不可用响应
1.如果系统在警告升级后确定驾驶员继续脱离,系统将在第一次升级请求或DCA后最迟10秒启动驾驶员不可用响应
脱手警告抑制【针对高速公路驾驶】
1.当车辆位于“高速公路”上时,该系统可能会抑制 HOR;制造商应详细描述可以抑制 HOR 的边界条件
2.如果由于驾驶员通过加速超越纵向控制而达到系统边界时,系统应在达到边界条件之前至少提前 5 秒给出 HOR;对于提前 5 秒未检测到的情况,应发出 DCA,除非驾驶员重新介入后仍能提供横向辅助;对于提前5秒未检测到的情况,车辆制造商应在检查安全概念期间向型式批准机构证明此类情况的可控性
3.如果系统有能力抑制加速器输入,以避免超出系统边界,则驾驶员应能够覆盖这一点
4.驾驶员根据下表在相关时段被认定视觉脱离驾驶座时提供 EOR;对于60公里/小时至130公里/小时之间的车辆速度值,应使用线性内插法计算相应的EOR时间;超过 135 公里/小时,应发出 HOR
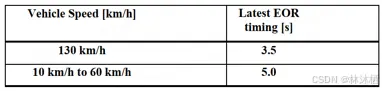
5.该系统应被设计为确定在固定时间内眼睛注视(或头部位置运动,当这被用来确定视觉参与时)是否没有偏离。在这种情况下,应发出EOR
6.该系统应以明显可区分的方式告知驾驶员当前是否抑制了 HOR。此信息旨在不主动促进驾驶员将手从转向控制中移开(即,没有手的转向盘指示不被视为违反此要求)
脱离检测和重新参与支持的附加策略
1.驾驶员状态监测系统应配备策略,以评估驾驶员是否脱离,在长时间内未确定驾驶员输入(例如通过驾驶员嗜睡的否定确定)的情况下,并实施适当的应对措施
驾驶员反复或长时间脱离控制
1.制造商应实施策略,在启动/运行循环期间内,检测到驾驶员长时间未充分参与至少导致多个驾驶员不可用响应启动时,禁用系统的激活
2.选项1:在启动/运行周期内,当检测到驾驶员表现出长时间的不充分参与时,系统应设计为禁止抑制HORs或系统发起操作的激活(如适用),当这种情况导致:
(a)一次不可用响应启动;
(b)最多3个DCA
(c)EOR或HOR的最多5次升级;
(d)最多10次EOR
(e)最多10次HOR
对于(b)至(e)项,在10分钟的滚动时间窗口内确定持续的接触不足
3.选项2:该系统应设计为在动力总成激活期间禁用HOR的抑制或系统启动操纵的激活(如适用),当检测到驾驶员表现出长时间的不充分接合时,这会导致:
(a) 一次不可用响应启动
(b) 最[3个DCA
(c) EOR最多升级5次;或者,
(d) 最多10次EOR
(e) 当HOR未被抑制时,最多10个HOR
对于(c)在30分钟的滚动时间窗口内确定长期接触不足。对于(d)至(e),在10分钟的滚动时间窗口内确定长期接触不足。当动力总成在关闭后不到5分钟内重新启动时,(c)至(e)的滚动时间窗口不应重置。
- 下一篇:浅析汽车底盘性能开发
- 上一篇:燃料电池汽车冬测Workshop黑河站活动总结



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
