




 广告
广告





















































法规标准-UN R171标准解读

——试验应至少在以下条件下进行:
(a) 不同类型或类别的静止车辆目标;
(b) 在前方车辆的TTC小于3秒时发生切出;
(c) VUT和引导车的不同速度;
(d) 前方车辆的横向加速度不同
车辆从相邻车道切入
基础测试:该测试应确认系统对相邻车道车辆切入的声明响应能力。
——相邻车道上的车辆目标应向VUT车道进行全变道(例如,3.5 m横向位移)。
——指示的TTC定义为目标完成变道操纵时的TTC,此时车辆目标的后中心位于VUT驾驶车道的中间。
——切入车辆不得偏离其规定的路径超过±0.2 m
扩展测试:测试应证明系统不会不合理地改变车辆从相邻车道切入的控制策略
——试验应至少在以下条件下进行:
(a) 不同类型或类别的切入式车辆;
(b) 切入发生在不同的TTC值;
(c) VUT和目标的不同速度;
(d) 目标的不同横向加速度
车道前方静止行人
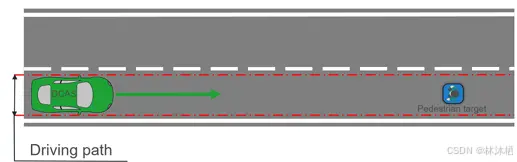
基础测试:该测试应确认系统对静止行人的声明响应能力。
——行人目标应位于 VUT 的行驶路径内,背对VUT
——在测试功能部分之前,VUT 应与行人目标直线接近撞击点至少两秒钟
扩展测试:测试应证明系统没有不合理地改变静止行人的控制策略。
——试验应至少在以下条件下进行:
(a) 位于车道内但VUT行驶路径外的行人目标;
(b) 面向不同方向定位的行人目标;
(c) 不同大小的行人目标;
(d) VUT的速度不同
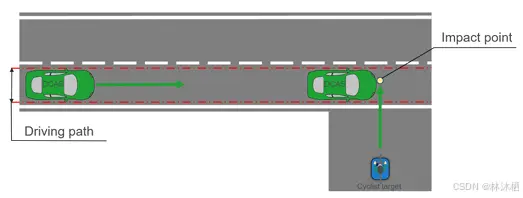
车道前方静止自行车目标
基础测试:该测试应确认系统对静止目标和围绕目标航行的任何横向运动的申报响应能力(如适用)。
——自行车目标应位于 VUT 的行驶路径内,背对目标车辆。
——在测试功能部分之前,VUT 应与骑车人目标直线接近撞击点至少两秒钟
扩展测试:测试应证明系统没有不合理地改变静止自行车的控制策略。
——试验应至少在以下条件下进行:
(a) 自行车目标以不同的偏移定位,直到目标位于VUT的行驶路径之外;
(b) 面向不同方向定位的自行车目标;
(c) VUT的速度不同;
(d) 朝向目标车辆的自行车目标
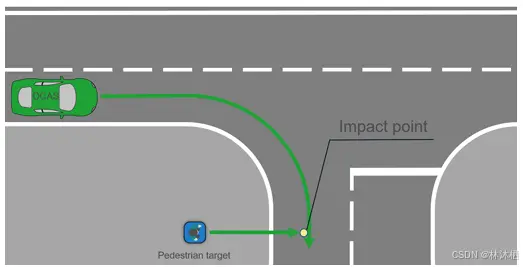
行人目标进入VUT路径

基础测试:该测试应确认系统对过街行人目标的声明响应能力。
——试验的功能部分应从以下内容开始:
(a) VUT以所需的测试速度在本段规定的公差和横向偏移范围内行驶,以及
(b) 与距离目标至少4秒的TTC相对应的距离。
——在测试功能部分开始和系统干预之间,应遵守公差。
——行人目标应以 5 km/h(+0/-0.4 km/h) 的恒定速度沿垂直于 VUT 行驶方向的直线行驶,不得在测试功能部分开始之前开始。如果VUT在整个测试功能部分保持规定的测试速度并且不制动,则行人目标的定位应与 VUT 协调,使 VUT 前部的行人目标撞击点位于VUT 的纵向中心线上,公差不超过0.2米
扩展测试:测试应证明系统没有不合理地改变过街行人目标的控制策略。
——试验应至少执行:
(a) 不同大小的行人目标;
(b) 以不同但恒定的速度移动的行人目标;
(c) 行人目标路径与VUT路径的不同角度。
自行车进入VUT的路径
基础测试:该测试应确认系统对过街自行车目标的申报响应能力。
——自行车目标应以 15km/h(+0/-1 km/h )的恒定速度沿垂直于 VUT 行驶方向的直线行驶,不得在测试功能部分开始之前开始。在测试功能部分之前的自行车目标加速阶段,应挡住自行车目标。如果VUT 在整个测试功能部分保持规定的测试速度并且不制动,自行车目标的定位应与VUT协调,使自行车目标在VUT前部的撞击点位于VUT的纵向中心线上,公差不超过0.2米
扩展测试:测试应证明系统没有不合理地改变交叉自行车目标的控制策略。
——试验应至少在以下条件下进行:
(a) 以不同但恒定的速度移动的自行车目标;
(b) 自行车道与主体车辆路径的不同角度;
(c) 不同的偏移
行人目标在交叉口进入VUT路径
- 下一篇:浅析汽车底盘性能开发
- 上一篇:燃料电池汽车冬测Workshop黑河站活动总结



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
