




 广告
广告





















































串并联再生制动控制策略对比分析

1. 前言
四驱系统的动力分配主要包括由分动器控制的轴间动力分配技术、轮间差速器控制的轮间动力分配技术和轴间轮间叠加耦合的综合控制技术。这三个控制技术是现今的三种主流动力分配技术。轮间动力分配技术主要依靠轮间差速器的作用,当汽车行驶在一些泥泞不平的路面上或者转向时,为了保证各个驱动轮与地面保持纯滚动,因此就需要把原本只需一个差速器的一根轴断开成半轴,并两个半轴都装有差速器,断开前装在主减速器后面的普通差速器就满足不了汽车行驶,此时取而代之的就是分别装在各个半轴上的差速器,即轮间差速器 [1] 。
在轮间动力分配技术中所需研究的一个重点是在转向和某轮出现滑移时如何分配各轮的驱动力来保证汽车的动力性和方向稳定性。美国工程师Gleaman发明了托森(Torsen)轮间差速器,Torsen差速器主要依靠涡轮蜗杆齿轮啮合机构作用 [2] ,这一机构不仅实现了差速器的锁止功能,而且限制了滑动。四驱系统中的恒时驱动可以通过托森轮间差速器完成,因此配备此差速器的汽车有良好的转向和直线驾驶性能。B.M. Pozin等 [3] 通过对车轮轮间动力分配关系的研究,设计了轮间动力分配控制系统。国内工程师也取得了许多成就,包括智能的四驱动力分配控制系统 [4] 、陈黎卿等 [5] [6] 基于人群算法的扭矩分配策略和利用建模仿真软件Matlab/simulink进行动力学建模仿真。在差速器动力分配控制方面,国内外也有较多的研究成果。R.Tchamna等 [7] 人为了使汽车保持尽可能小的侧偏角,设计了基于滑模控制器开发差动控制器。胡建军等 [7] 在提高汽车转向能力和整车动力性方面,分别设计了新型差速系统。
从国内外的研究成果上来看,在轮间动力分配方面上都取得了不小的成绩,主要的方向都是在保证汽车动力的同时,提高汽车的转向性能和操纵稳定性。合理优秀的轮间动力分配系统会给予四驱汽车强大的驱动能力,并且在提高汽车自身动力性和行驶稳定性的同时,加强动力分配系统和车身其他系统的耦合关系。因此,要研究轮间动力分配控制系统,并针对轮间动力分配技术,进行建模仿真和分析。
2. 理论模型选取与控制系统设计
2.1. 理论模型的选取与简化
根据汽车在Y轴和Z轴的力平衡方程式和力矩平衡方程式,以及发动机、传动系统、变速器各个模型的数学方程式 [8] [9] [10] ,进行推导和计算,以确定理论模型,为建立仿真模型做好准备。
本系统把节气门在不同开度时发动机输出的转矩作为输入至传动系的数据,在MATLAB仿真软件中把这个数据输入至Lookup Table模块之中即得到传动系的动力输入模型。动态扭矩的输出数学方程式为
其中,Mes为静态输出扭矩,Med为动态输出扭矩,Te1为系统滞后时间,Te2为时间系统常数,S为拉氏变化变量。
发动机的动态输出扭矩作为输入,输入至传动系中。设轴间分配比为α,轮间分配比分别为λ1、λ2,则发动机动态输出扭矩经传递系传递至各轮的扭矩为:
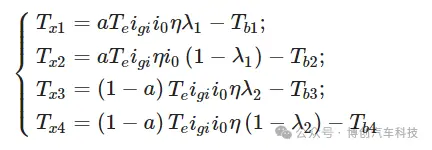
其中,Tx为各轮驱动力矩,Tb为各轮制动力矩,i0为主减速器传动比,igi为变速器传递比,η为传动系的传动效率(式中取0.90)。此时车轮运动方程为:
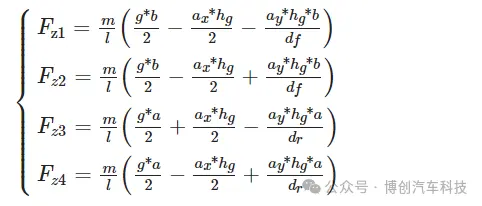
其中,Fz为各轮动载荷,ax为汽车纵向加速度,ay为侧向加速度,hg为汽车质心高,a和b分别为前轴长和后轴长。
此时,各车轮的阻力矩则为:
Tf=f∗Fz∗R
变速器模型的选取影响着不同工况下汽车对转速和转矩的要求,以及发动机的最佳工况范围。变速器的输入即为发动机的输出。经过不同档位的传动比i,输出不同的转矩和转速。为了更好地模拟驾驶员的换挡,本方案选择常规六档变速箱,并且选取各挡加速度曲线交点为换挡时机,变速器变速公式为:
其中,i为各档位传动比。本设计主要考虑汽车内部轮间动力分配的影响,参考Dugoff轮胎模型,得到车轮滑移率为:
其中,Wr为驱动轮角速度,v为实际车速。
此时,驱动力方程为:
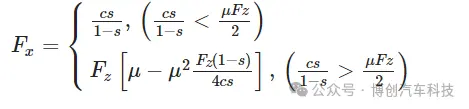
其中,μ为地面与轮胎之间的摩擦系数,c为轮胎纵向刚度,Fz为驱动轮法向载荷。
现在汽车线性七自由度模型最为广泛,七自由度模型包含分别绕X轴的纵向运动、沿Y轴的侧向运动和绕Z轴的横摆运动以及四个车轮的自由度。但由于计算和建模仿真比较复杂,因此对汽车七自由度进行简化,简化结果如图1所示。
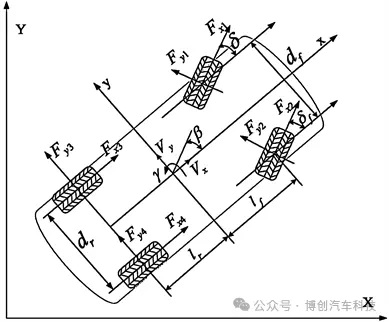
图1. 简化后汽车线性七自由度模型
由此便得到简化的汽车理论模型,以便于后续MATLAB/Simulink模型建立。为了形成四驱汽车的轮间动力分配仿真模型,后面还需要采用它们之间的相互变量联系以进行连接 [11] 。
2.2. PID控制原理及设计
轮间动力分配对汽车行驶稳定性和转向稳定性有较大的影响 [12] ,主要起作用的附加横摆力矩是由四驱汽车动力分配比产生的,而且这个附加横摆力矩只在一定范围内起作用,在此范围内具有较好动力分配控制系统的四驱车相对普通汽车有更好的动力分配策略,能大大改善汽车安全性。为了更好的根据动力分配来实现汽车转向稳定性和主动安全性,选择利用PID控制器来完成动力分配控制系统设计。而KP、KI、KD三个参数的设定决定着控制器性能的好坏 [13]。比例单元(P)控制环节,即当控制系统内的输出值和初始设定值产生偏差e(t)时,为了减少偏差的大小,此环节会及时成比例的反应误差的大小。积分单元(I)控制环节,此环节的出现主要是为了消除系统静差。积分常数决定积分单元控制环节的好坏,选择合理范围内的积分常数可以有效提高控制系统的可靠性。微分单元(D)控制环节,此环节主要通过对系统施加提前修正信号来控制系统的偏差值e(t)的变化趋势,保持偏差值e(t)的变化不会过大,进而缩短调节时间加快系统的响应速度。PID控制系统的控制原理如图2所示。

图2. 控制系统原理
其中, rin(k)为初始值, yout(k)为输出值,它俩之差 e(k)=rin(k)−yout(k)为误差,PID控制器接收此误差,按照自身控制规律分析计算得到控制量 u(t),则整理得到控制原理的表达式为:

简化成传递函数为:

其中,kp为比例系数;T1为时间积分常数;TD为时间微分常数。
利用PID控制器来控制轮间动力分配,需要在MATLAB/Simulink中建立PID模型。单独PID模型建立如图3所示。
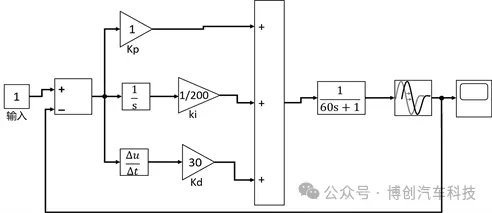
图3. PID控制器Matlab模型
把PID控制器加入轮间动力分配模型中,通过调整KP、KI、KD三个参数来保证输出平稳,各项参数如表1所示。

表1. 分配参数
3. MATLAB/Simulink模型建立与仿真分析
3.1. 模型建立
在对简化后的汽车理论模型进行分析后,利用MATLAB/Simulink对发动机、传动系统和变速器等模块进行建模与仿真。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
