




 广告
广告





















































串并联再生制动控制策略对比分析


表4. 车速与分配比
车速为36 km/h和72 km/h的整车状态变化仿真结果如图8和图9所示。
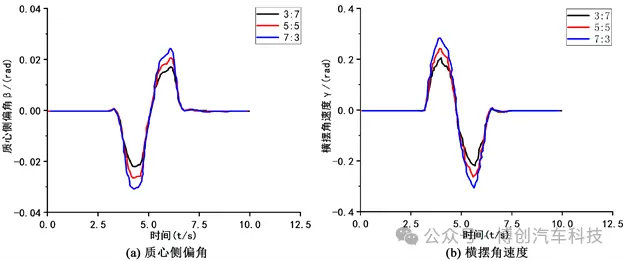
图8. 36 km/h时汽车状态变化
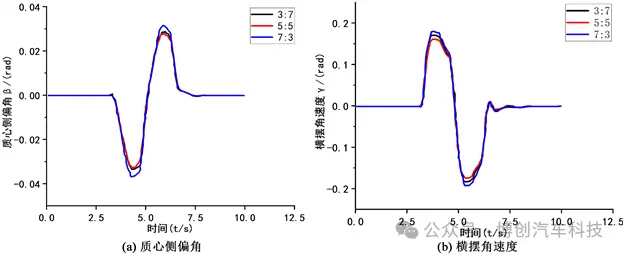
图9. 72 km/h时汽车状态变化
由图8可知,以36 km/h的工况下,分配比在5:5时,质心侧偏角峰值为0.021 rad,横摆角速度峰值为0.24 rad/s,把轮间分配比为5:5作为参考值。当左右轮动力分配比为3:7时,与参考值相比,质心侧偏角峰值为0.015 rad,下降了0.006 rad,横摆角速度峰值为0.19 rad/s,下降了0.05 rad/s。当左右轮动力分配比例为7:3时,与参考值相比,质心侧偏角峰值为0.026 rad,升高了0.005 rad;横摆角速度峰值为0.3 rad/s,升高了0.06 rad/s。汽车状态变化如表5所示。

表5. 36 km/h时质心侧偏角和横摆角速度变化
由图9可知,在72 km/h的工况下,分配比在5:5时,质心侧偏角峰值为0.032 rad,横摆角速度峰值为0.185 rad/s,把轮间分配比为5:5作为参考值。当左右轮动力分配比为3:7时,与参考值相比,质心侧偏角峰值为0.031 rad,下降了0.001 rad,横摆角速度峰值为0.165 rad/s,下降了0.02 rad/s。当左右轮动力分配比例为7:3时,与参考值相比,质心侧偏角峰值为0.036 rad,升高了0.004 rad;横摆角速度峰值为0.2 rad/s,升高了0.015 rad/s,汽车状态变化如表6所示。

表6. 72 km/h时质心侧偏角和横摆角速度变化
4. 结论
本文基于MATLAB/Simulink,先对发动机传动系等相关构造进行建模,再对传动系中加入PID控制器模型。根据PID控制器的特点,对KP、KI、KD三个参数进行调整。最后对轮间动力分配进行仿真分析,得到横摆角速度和质心侧偏角的变化程度,实现轮间动力分配控制系统设计,主要结论如下:
1)对汽车轮间扭矩进行不同比例分配必将影响汽车的转向特性以及行驶稳定性。当汽车转向时,如果外侧车轮扭矩增大,内侧车轮扭矩减小,汽车的横摆角速度将呈现增大趋势;反之,汽车的横摆角速度将呈现减小趋势。前者促进汽车转向,后者则抑制汽车转向。同时,车轮扭矩分配比不同,汽车状态的响应时间也有不同程度的变化,轮间扭矩分配在一定范围内影响着汽车响应滞后性;
2) 固定前后轴动力分配比例后,同轴左右轮的动力分配比对汽车横向稳定性有影响,而利用PID控制器控制可以减少误差。通过控制质心侧偏角和横摆角速度不断往较好的转向状态上调整,使车辆在当前路面和不同前轮转角下实现最优转向效果;
3) 通过仿真分析,发现轮间动力分配主要影响轮胎的横摆角速度。由于轴间动力分配比例不同,同轴两轮的横摆角速度不同,从而产生促进转向和抑制转向的情况。PID控制器可使质心侧偏角和横摆角速度与期望值的误差处于合理范围内,并通过控制轮间扭矩和分配比,使汽车具有适量的不足转向以保证汽车的主动安全性和操纵稳定性。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
