




 广告
广告





















































ISO 34503:2023《道路车辆 — 自动驾驶系统的试验场景 — 运行设计域规范》中文版

区域包括与典型驾驶条件不同的特殊道路布局,或具有特定驾驶规则或环境条件的区域。一些自动驾驶系统(ADS)应用可能被限制在特定区域内安全运行。区域属性至少应分类为以下属性:
a) 地理围栏区域;
b) 区域类型:
1) 固定区域:学校区域、环保区域、工业区、停车场;
2) 动态区域:交通管理区域、移动作业区域;
3) 干扰区域:城市峡谷、架空电线区域、茂密植被区域;
4) 港口区域;
5) 货运配送中心;
c) 地区或州。
通过定义地理围栏区域,可能已经隐含了9.3条至第11条中的一些其他属性。然而,整个地理围栏区域有可能被排除在ODD定义之外,任何例外情况都应使用本文档规定的分类法和格式进行定义。如果将某个区域定义为ODD属性,则意味着该区域内的所有内容均为ODD的一部分,除非明确排除。
9.3 可行驶区域
9.3.1 通用属性可行驶区域是指配备ADS的车辆可运行的区域。可行驶区域至少应分类为以下属性:
a) 可行驶区域类型;
b) 可行驶区域几何形状;
c) 可行驶区域车道规格;
d) 可行驶区域标志;
e) 可行驶区域边缘;
f) 可行驶区域表面。
9.3.2 可行驶区域类型
可行驶区域类型至少应分类为以下属性:
a) 高速公路(motorways、highways或interstates);
b) 主干道(如双车道公路、单车道公路);
c) 放射状道路;
d) 集散道路;
e) 次要道路或地方道路;
f) 匝道或出口匝道;
g) 停车位;
h) 共享空间。
高速公路(motorways、highways或interstates)是禁止非机动车和行人通行的高流量道路。
放射状道路是连接高速公路与集散道路或城市中心的高密度交通道路。
集散道路连接放射状道路与次要道路或地方道路,通常通行能力较低到中等。
次要道路或地方道路用于连接居民区和其他当地设施,这些道路交通流量较小。
匝道是用于进出高速公路(motorways、highways或interstates)的道路。
停车位是停放一辆车的实际空间。
共享空间可能是目标车辆与其他参与者(如行人或骑自行车者)共享的空间。
当利益相关者将上述属性用于可行驶区域类型时,应将所使用的每个属性作为ODD定义的一部分进行定义。
在某些地区,上述属性可能有本地俗称。在这种情况下,利益相关者应定义每个术语,以便与上述属性进行映射。
每种可行驶区域类型至少应进一步分为以下两类:
1) 有主动交通管理的;
2) 无主动交通管理的。
每种可行驶区域类型都应有关联的限速规定。
9.3.3 可行驶区域几何形状
可通过在三个平面观察可行驶区域布局来描述其几何形状:
a) 水平面;
b) 横断面;
c) 纵断面。
如果某些属性与ADS的运行条件无关,则可在ODD定义中忽略这些属性(具体取决于格式定义,见第12条)。
在水平面上,应包含两个主要属性:
1) 直线;
2) 曲线。
曲线应通过道路的曲率半径来度量。将道路布局投影到水平面上时,可以看到水平路线。
在横断面中,主要属性至少应分类为以下属性,或包含其他额外属性:
i) 类型:分隔式、未分隔式、路面类型;
ii) 道路边缘的障碍物;
v) 车道组合类型;
vi) 超高/横坡。
横断面是道路在横向剖面的布局。
下面的横断面(见图3)提供了道路上或道路附近的特征信息,如路面或分隔式可行驶区域。横断面属性可能包括横坡和路拱。
在纵断面上,应包含三个主要属性:
1. 上坡(正坡度);
2. 下坡(负坡度);
3. 水平路段。
在道路纵向剖面的垂直布局中可以看到纵断面路线。
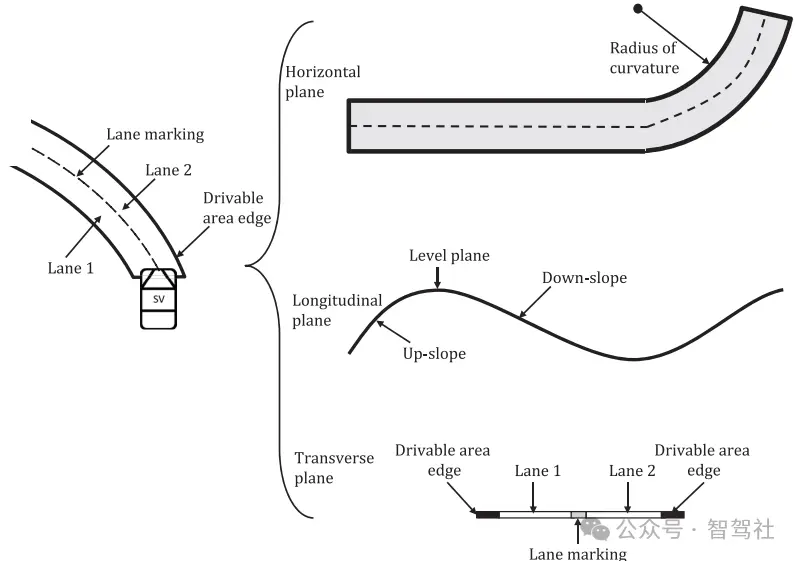
图3 道路几何结构配置



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
