




 广告
广告





















































ISO 34503:2023《道路车辆 — 自动驾驶系统的试验场景 — 运行设计域规范》中文版


概述
向自动驾驶系统(ADS)迈进是受该技术诸多潜在益处驱动的,比如提高安全性、减少交通拥堵、降低排放,以及有可能为那些无法驾车的人增加出行便利。为了实现这些益处,安全引入自动驾驶系统技术至关重要。
自动驾驶车辆技术的发展受到了公众的广泛关注,世界各国都着重关注以下方面:
- 确保出于测试 / 试运行目的以及商业运营而引入自动驾驶系统时,能安全、可靠且合法地进行;
- 建立公众及消费者对该技术的信任与接受度。
安全使用自动驾驶车辆技术的一个关键方面是界定其功能和局限,并将这些信息清晰地传达给终端用户,从而达到 “知情安全” 的状态。确定自动驾驶系统能力的第一步是定义其运行设计域(ODD)。除了安全运行之外,出于符合法律法规以及满足车辆目标(例如出行和舒适需求)的要求,也需要对ODD进行定义。
ODD代表了自动驾驶系统在行程中能够安全执行动态驾驶任务(DDT) 的运行条件。本文着重关注给定自动驾驶系统ODD定义的分类法和格式,以便对ODD形成共识。
本文所规定的ODD分类法和定义格式将使自动驾驶系统制造商能够在其设计中明确、落实并传达最低安全要求,同时允许终端用户(例如保险公司、国家、地方及地区政府)、运营方以及监管机构在其采购过程中参考ODD的一组最低属性及性能要求。这也将使自动驾驶系统制造商、开发者以及零部件和子部件供应商能够界定运行能力,并汇集各类证据,从而增强对最终产品(如零部件规格)安全性以及从测试和验证活动中获取的数据的信心。
尽管存在多种不同的测试、试验和部署环境,本文档提供了一套通用分类法,用于对每种环境进行定义。对于基于场景的 ADS 验证方法而言,ODD 定义的分层分类法和定义格式还有助于高效地创建场景并进行场景参数化。这样一种定义格式标准正在开发中 —— 即 ASAM OpenODD。
1. 范围
本文件规定了用于指定运行条件的分层分类法要求,通过该分类法可对自动驾驶系统(ADS)的ODD进行定义。本文件还规定了使用该分类法对ODD进行定义的格式要求。ODD包含自动驾驶系统设计运行时所处的特定条件(其中包括静态和动态属性)。
本文件主要适用于L3级和L4级自动驾驶系统。L5级自动驾驶系统的ODD不受限制(即可以在任何地方运行)。
本文件可供参与自动驾驶汽车安全案例开发的组织使用,特别是进行试验、测试和商业部署的组织。L3级/L4级自动驾驶系统的制造商也可使用本文件来定义自动驾驶系统的运行能力。保险公司、监管机构、服务提供商、国家、地方和地区政府可能也会对本文件感兴趣,因为它能帮助他们了解自动驾驶系统可能的部署情况和能力。
本文件不涵盖运行设计域属性的基本测试程序,也不涵盖运行设计域属性的监测要求。
2. 规范性引用文件
下列文件中的部分或全部内容在本文件中被引用,构成了本文件的要求。对于注明日期的引用文件,仅所引用的版本适用。对于未注明日期的引用文件,所引用文件的最新版本(包括任何修订)适用。
- ISO/SAE PAS 22736《道路机动车辆驾驶自动化系统相关术语的分类法和定义》
- ISO 34501《道路车辆——自动驾驶系统的测试场景——术语》
- ISO 34502《道路车辆——自动驾驶系统的测试场景——基于场景的安全评估框架》
3. 术语和定义
就本文件而言,采用ISO/SAE PAS 22736和ISO 34501中给出的术语和定义,以及以下内容。ISO和IEC在以下地址维护用于标准化的术语数据库:
- ISO在线浏览平台:https://www.iso.org/obp
- IEC电子百科全书:https://www.electropedia.org/
3.1 动态元素
在动态驾驶任务(DDT)时间范围内,运行设计域(ODD)中的可移动物体或行为体。
注1:改编自参考文献 。
3.2 环境条件天气、其他大气状况,以及未被定义为场景元素(3.4)的其他环境条件(还包括信息技术连接性)。
3.3 最小风险操纵MRM由自动驾驶系统触发并执行的战术或操作层面的操纵,以达成最小风险状态(MRC)。
3.4 场景元素配备自动驾驶系统车辆运行环境中的不可移动物体。
注 1:本定义仅适用于运行设计域(ODD)范畴。
注 2:不可移动物体不限于静态物体。例如,交通信号灯、活动桥。
3.5 弱势道路使用者未受保护的道路使用者,如摩托车骑手、骑自行车者、行人、骑马者以及残疾人士或行动与定向能力受限者。
3.6 交通参与者使用道路(包括人行道及其他相邻空间)的任何人。
3.7 目标运行域TOD自动驾驶系统预期运行的一系列运行条件,包括但不限于环境、地理、时段限制,和 / 或某些交通或道路特征的必要存在或不存在情况。
注 1:运行设计域(ODD)定义的是自动驾驶系统设计运行的条件,而目标运行域(TOD)是自动驾驶系统将被部署(预期运行)的区域(描述位置)。因此,目标运行域(TOD)的条件可能超出自动驾驶系统运行设计域(ODD)的范围。如需进一步说明,见第 5 条。
3.8 当前运行域COD自动驾驶系统当前紧邻区域内目前存在的特定运行条件集合,包括但不限于环境、地理、时段限制,和 / 或某些交通或道路特征的必要存在或不存在情况。
3.9 运行域OD运行条件的集合,包括但不限于环境、地理、时段限制,和 / 或某些交通或道路特征的必要存在或不存在情况。
注 1:该集合可用于描述特定环境、地理中的现实世界条件、测试的合成条件及其他各种用途。
4 缩写术语
ADS: 自动驾驶系统 (Automated Driving Systems)
ASAM: 自动化与测量系统标准化协会(Association for Standardization of Automation and Measuring Systems)
AV: 自动驾驶汽车(Automated Vehicle)
COD: 当前运行域(Current Operational Domain)
DDT: 动态驾驶任务(Dynamic Driving Task)
MRC: 最小风险状态(Minimal Risk Condition)
MRM: 最小风险操纵(Minimal Risk Manoeuvre)
OD: 运行域(Operational Domain)
ODD: 运行设计域(Operational Design Domain)
TOD: 目标运行域(Target Operational Domain)
V2I: 车到基础设施(Vehicle to Infrastructure)
5. 运行设计域(ODD)与目标运行域(TOD)
运行设计域(ODD)定义了自动驾驶系统(ADS)设计为能安全运行的条件。然而,目标运行域(TOD)定义了自动驾驶系统在现实世界中可能遇到且必须安全运行的条件。通常,目标运行域(TOD)会是运行设计域(ODD)属性的超集。
在自动驾驶系统的实际部署中,运行设计域(ODD)与目标运行域(TOD)之间的差异凸显了自动驾驶系统的局限性。在所有实际情况中,运行设计域(ODD)的定义不够详尽,无法涵盖目标运行域(TOD)中的所有属性或事件。因此,客观定义运行设计域(ODD)与目标运行域(TOD)之间的界限,并在自动驾驶系统中设置设计机制,以便在遇到运行设计域(ODD)退出情况时执行后备操纵,确保自动驾驶系统在目标运行域(TOD)中安全运行,这一点至关重要。当前运行域(COD)指的是实时运行域,即自动驾驶系统正在经历的实时现实世界条件。
运行设计域(ODD)与目标运行域(TOD)的关键区别在于,运行设计域(ODD)表达的是自动驾驶系统的规格说明,而目标运行域(TOD)是对各种自动驾驶系统预期运行环境的描述 / 规格说明。一般而言,可以预期在目标运行域(TOD)内运行的任何自动驾驶系统的运行设计域(ODD)是目标运行域(TOD)的超集(即涵盖所有方面)。另一种观点是,目标运行域(TOD)可被视为所有自动驾驶系统运行设计域(ODD)都需满足的要求 —— 前提是这些自动驾驶系统要在目标运行域(TOD)所描述的环境中运行。
根据自动驾驶系统的设计和要求,目标运行域(TOD)可能是运行设计域(ODD)的超集,反之亦然。如果目标运行域(TOD)是运行设计域(ODD)的超集,这意味着作为自动驾驶系统安全措施的一部分,将需要采取适当的风险缓解措施。
6. ODD 与场景的关系
由于运行设计域(ODD)的定义需要具备可测试性,运行设计域(ODD)的属性及其属性定义在基于场景的测试中起着关键作用。需要强调的是,运行设计域(ODD)和场景是两个不同但相关的概念。运行设计域(ODD)描述的是自动驾驶系统设计运行的操作条件,而场景连同部分场景元素和环境条件,描述的是交通参与者的行为,并且还可能定义在运行设计域(ODD)的实例(部分)内或之外,本车期望的行为。
注:除运行设计域(ODD)外,自动驾驶系统的其他约束因素见附录 A。
运行设计域(ODD)的定义应作为依照 ISO 34502 《ISO-34502-2022道路车辆-用于自动驾驶系统的测试场景—基于场景的安全评估框架》的基于场景的安全评估框架的输入之一。因此,自动驾驶系统验证与确认过程的首要步骤之一,是分析自动驾驶系统设计的运行设计域(ODD),以创建一组测试场景。第二步则涉及从行为库中选择一组行为,来测试自动驾驶系统的期望行为。行为的选择可能包括非期望行为,以测试自动驾驶系统的响应。运行设计域(ODD)的一个实例,连同期望行为以及根据事件和触发条件对交通参与者行为的描述,将为自动驾驶系统提供场景定义。这样一个定性的场景随后可以进一步细化为功能、抽象、逻辑和具体场景,以创建一个场景库(图 1)。
此外,运行设计域(ODD)的定义可用作判断单个测试场景是在运行设计域(ODD)内部、外部还是边界的标准。这些场景还能根据运行设计域(ODD)对自动驾驶系统的激活和停用进行测试。针对运行设计域(ODD)之外的场景进行测试很重要,以确保自动驾驶系统不会在其设计范围之外的情况下被误用。同时,应对测试场景集与运行设计域(ODD)的定义进行比较,以分析测试空间的覆盖范围。
由于一个集中的场景库可能针对不同的运行设计域(ODD)有大量场景,运行设计域(ODD)的属性(见第 8 条)和行为标签(ASAM OpenLabel)在为自动驾驶系统高效搜索场景方面可发挥关键作用。每个场景都与一个运行设计域(ODD)存在关联。在 ISO 34502 中提到了三种类型的场景:感知、交通和车辆控制。例如,一个专注于盲点检测的感知相关场景可能存在于高速公路或市中心的道路上,其中高速公路和市中心道路就是运行设计域(ODD)的实例。与运行设计域(ODD)的定义相比,场景有诸如事件、触发条件和其他动态变化行为等额外的构成要素。这些场景属性可根据 ASAM OpenLabel 进行分类。
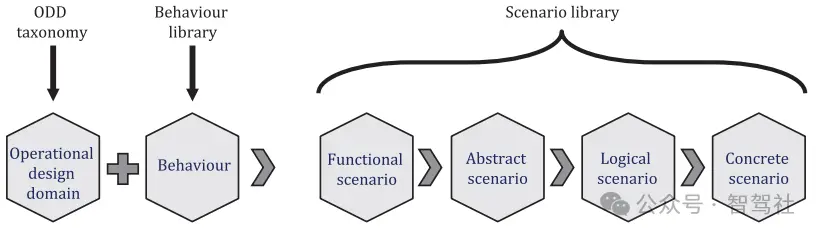
图1 - 运行设计域(ODD)、行为与场景之间的关系示例



编辑推荐




最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
