




 广告
广告





















































汽车主动悬架系统控制方法综述

0 引言
汽车主动悬架系统是衡量车辆品质的重要组成部分,对提升车辆的行驶平顺性和乘坐舒适性起着至关重要的作用[1]。为了满足车辆的安全性、舒适性和通过性要求,悬架结构形式一直在不断地更新和完善。与被动悬架和半主动悬架相比,主动悬架系统的悬架刚度和阻尼特性能根据汽车的行驶条件进行动态自适应调节,从而在输出力范围、操纵安全性以及乘坐舒适性等方面具有巨大的设计潜力[2]。
近年来,国内外各大企业和研究机构对主动悬架系统结构设计和控制方法开展相关研究。2020年,李忠兴等[3]采用协调互联状态控制与车辆高度控制耦合,构建一种电控空气悬架系统。研究结果表明,车辆在道路上直线行驶时,牺牲转弯条件下的部分乘坐舒适性提高了车辆的转向稳定性。2023年,Zhao等[4]设计了一种控制框架,用于解决空气主动悬架系统的车身高度跟踪控制问题。仿真结果表明该控制框架的有效性,在随机路面激励下能实现空气悬架的平顺性调节。Sun等[5]提出一种空气弹簧和磁力弹簧并联的准零刚度悬架,降低了悬架系统的固有频率。数学建模和仿真试验结果表明,该空气悬架系统能明显降低车身加速度,提高了车辆的平顺性和操纵稳定性。Wenbo等[6]将液压作动器纳入控制器设计,提出了一种无近似、无反步的控制方案。仿真结果表明,所提控制方法改善了电控液压主动悬架的性能。王军年等[7]设计了一种能主动抗侧倾的电控液压悬架系统,搭建主动抗侧倾控制方法联合仿真平台。仿真结果表明,该悬架能够提升特种车辆的抗侧倾能力,且能将电控液压悬架的运动能量进行回收。寇发荣等[8]提出了一种滑模控制方法来降低电磁混合主动悬架系统作动器故障。仿真结果表明,拥有滑模控制方法的电磁混合主动悬架的悬架动挠度均方根值较被动悬架有所降低,改善了车辆平顺性。孙凤等[9]研究了一种控制方法,用于减少电磁主动悬架的能量损耗。仿真结果表明,改进控制方法与未改进的控制方法比较,电磁主动悬架功率降低的同时,车身垂向加速度降幅得到较大改进,悬架动行程与轮胎动变形性能也有所提升,电磁主动悬架的性能得到提升。刘锦超等[10]设计了一种控制器,并进行联合仿真和实车测试。结果表明,所提控制器在多种工况下的车身高度稳态误差较小,且未出现明显的控制超调现象,提升了电控空气悬架的性能。通过综述主动悬架系统及其控制方法的研究进展,发现研究和开发高性能、更环保、实用性能更好的主动悬架系统是车辆动力学与控制学科亟需解决的难题。
为了深入了解当前汽车主流主动悬架系统及其控制方法研究现状,本文综述了主动悬架系统组成以及其经典控制方法和现代控制方法,总结了不同控制方法的优缺点,对主动悬架系统控制方法研究方向和发展趋势进行展望。
1主动悬架系统
随着汽车电子控制系统以及悬架减振技术的发展,现代汽车中的主动悬架多为电子控制单元控制的主动悬架系统,又称电控主动悬架。电控主动悬架系统由传感器及控制开关、电子控制单元(ElectronicControl Unit,ECU)和执行器组成,能够改变悬架系统的刚度、减振器的阻尼力及车身高度等参数。目前研制开发的新型主动悬架有电控液压主动悬架、电控空气悬架、电磁主动悬架系统[11]。
1.1 电控液压主动悬架系统
电控液压主动悬架系统由悬架电子控制单元、液压泵、储液罐、液压控制阀、悬架液压缸、车身高度传感器、车身加速度传感器等组成。
电控液压主动悬架系统通过液压控制传递能量来调整车身的平衡,抵抗路面传递过来的激励,同时能保证车辆具有良好的操纵稳定性。汽车在正常道路行驶的过程中,假如车辆转向发生侧倾,导致车辆外侧液压缸的压力增高,内侧车轮液压缸压力降低,压力信号传输至电控单元,电控单元根据压力信号来调整车身姿态,防止发生侧倾。车身安装有车身高度传感器和车身加速度传感器,这些传感器信号输入电控单元经分析后,电控单元将控制信号送至液压泵,液压泵接收信号后对油压进行调节,可使转弯时的侧倾最小。液压控制系统原理如图1所示。
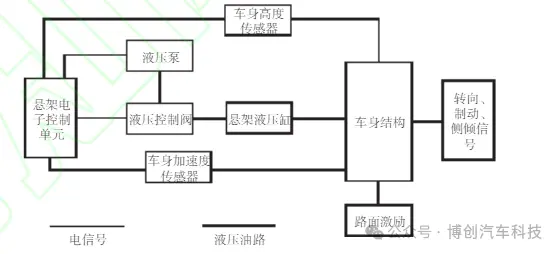
图1 液压系统控制原理
1.2 电控空气悬架系统
电控空气悬架由空气弹簧、减振器、车身加速度传感器、车身高度传感器、悬架控制单元、储气罐、供气系统、电磁阀、管路及线束等组成。奥迪电控空气悬架系统结构组成如图2所示。

图2奥迪电控空气悬架系统
车辆行驶时,车轮附近设有车身高度传感器,根据车身高度传感器输出的信号,ECU确定该车辆的高度,将调节电信号传至执行器,执行器向电磁阀发出动作信号,电磁阀的占空比是决定电磁阀的开闭时间的主要因素,调整占空比就能控制空气弹簧的充放气,让空气弹簧刚度处于合适范围。车辆高度过低时,空气压缩机将高压气体送入空气弹簧气室,使空气弹簧压力增大,提高悬架的高度,从而提升车辆高度。反之,降低车辆高度,使乘员处于舒适的行车环境。
当然,空气悬架的作用不仅能调节车身高度,也可进行底盘刚度调节,同时空气悬架对高频振动有较好的隔振效果,能够改善车内声音品质,提升车辆乘坐舒适性。
1.3电磁主动悬架系统
电磁主动悬架又称磁流变液减震器悬架,具有响应速度快、控制系统精度高、效率高等特点[12]。电磁主动悬架系统主要由连杆、电磁主动作动器、扭杆弹簧、轮边减振系统等组成,悬架结构如图3所示。

图3电磁主动悬架[13]
电磁主动悬架按其作动器构型不同,分为直线电机式和旋转电机式。前者将电能直接转化成线性动能,后者输出或输入转矩,通过传动装置将旋转动能和线性动能相互转化。该类型悬架搭载了电磁减振器,根据传感器检测到的地面激励信号等参数,通过改变电磁减振器中的电流大小来控制电磁力,调整车身高度,从而提高乘坐舒适性。
2 主动悬架系统控制方法
将国内外现有主动悬架系统控制方法分为经典控制方法和现代控制方法。其中经典控制方法分别为PID控制、状态反馈H_∞控制、模糊控制和神经网络控制;现代控制方法分别为滑模控制、自适应控制、鲁棒控制和预测控制。
2.1 经典控制方法 2.1.1PID控制
詹长书和苏立庆[14]通过粒子群优化算法,优化了PID控制器的参数选择问题。试验结果表明,优化后的主动悬架控制性能得到明显提高,从而提升了车辆的平顺性和操纵稳定性。Ma[15]等设计了主动悬架系统PID控制器,建立了仿真模型图。仿真结果表明,该PID控制器能够有效提高主动悬架系统整体性能,进一步增强车辆的舒适性和安全性。Hu等[16]设计了一种PID反馈控制方法。采用分数阶PID算法控制电机的转角,实现悬架系统的阻尼调节。仿真和试验结果表明,分数阶非线性悬架模型的仿真结果比传统线性悬架模型的仿真结果更接近实际实验值,提高了各项性能指标的精度。与传统PID控制电路相比,针对电机设计的分数阶PID控制电路具有更好的控制性能。Parvez等[17]采用PID控制器来研究主动悬架系统在车身加速度和振动幅值稳定时间方面的性能。然后对弹簧刚度、坝系数等参数的不同组合进行了对比分析。研究表明,在主动系统中,车身加速度降低了92.20%,沉降时间减少了30%,提高了平顺性和道路操控性。
2.1.2 状态反馈H_控制
Jin等[18]研究表明,与被动悬架相比,采用约束鲁棒H_∞控制器的主动悬架可以提高车辆的乘坐舒适性和抓地性能。李杰等[19]采用约束状态H_∞控制方法,研究主动悬架对轮毂电机电动汽车脉冲平顺性的影响。仿真结果表明,在脉冲路面上,所提控制方法改善了簧载质量垂向加速度和簧载质量俯仰角加速度,增加了主动悬架的动行程和相对动载荷。王刚等[20]为了提高开发主动悬架系统效率,减少整车模型参数,开发出整车主动悬架免参数H_∞控制方法。仿真结果表明,该控制方法能达到最优控制的效果,改善低频范围内的操纵稳定性和平顺性。Arivazhagan[21]提出了输入—输出有限时间稳定条件与静态输出反馈H_∞控制相结合的控制方法,有效抑制短时路面干扰。建立的四分之一车辆主动悬架模型,利用变量替换法和线性矩阵不等式设计了一个可行的静态输出反馈控制器。输出反馈控制的初始不可行问题通过状态反馈技术解决。理论结果表明,与被动和传统的静态输出反馈控制方案相比,采用静态输出反馈H_∞控制的组合输入—输出有限时间稳定条件能更好地提高车辆性能。此外,还验证了控制器的鲁棒性。Wei[22]设计了一种新型的输出反馈H_∞最优控制器。分别在颠簸路面激励和C级路面激励下,仿真了时滞对车体垂向加速度和俯仰加速度的影响。试验结果表明,在颠簸路面下,时滞小于25ms时,控制器的性能受影响较小;在C级路面激励下,即使时滞达到50ms,控制器的性能也不会受到影响。
2.1.3 模糊控制
Zhang等[23]将模糊控制引入到PID控制中,提高了经典PID控制方法的抗干扰能力,并通过实时修改控制器参数,提高了系统的鲁棒性。将非PID控制、PID闭环控制和模糊PID控制3种控制方式对车辆的行驶状态进行试验对比。此外,对车辆平顺性进行评价,以验证3种控制算法。试验结果表明,基于模糊PID控制系统的车辆侧倾角和侧向加速度得到了明显的改善,车辆的抗干扰能力和稳定性也得到了很大的提高。Khan等[24]将模糊控制器和非线性反步控制器集成为一种控制机构,通过主动悬架控制各个车轮防滑。仿真结果表明,使用该集成控制机构可以使主动悬架控制车轮垂直载荷,降低车轮的打滑,提高车辆的稳定性。Han等[25]提出一种基于路面估计的模糊PID主动悬架系统控制方法,利用傅里叶变换拟合道路功率谱密度,与主动悬架结合,实时评估道路状况。仿真试验结果表明,所提出的控制方法能够根据路面状况自适应调整参数,从而满足不同路面状况下主动悬架系统的控制要求。Yin等[26]设计了模糊PID控制器对参数进行自主调节。将连续交叉路段驼峰模型和C级道路模型作为道路输入信号,对比了被动、PID控制和模糊PID控制悬架的振动特性。仿真试验结果表明,与其他2种情况相比,采用模糊PID控制可显著减小车身的垂向、俯仰和侧倾振动,并修正悬架动挠度和轮胎动载荷,从而提高乘坐舒适性。与PID控制悬架系统相比,加速度减小约20%,悬架工作空间减少约10%,轮胎挠度减小约15%。Ji等[27]提出一种增强型变论域模糊PID控制,在传统变论域模糊PID 控制的基础上,构建自适应伸缩因子控制器,能实时自适应确定和调整伸缩因子的参数。仿真试验结果表明,在不同工况下,所提出的增强型变论域模糊PID控制方法可降低车身加速度、悬架动挠度和轮胎动载荷的均方根值,提高了车辆的乘坐舒适性,解决了传统变论域模糊PID控制中相关参数固定、难以确定、无法自适应调节等问题。薛文平和张春玲[28]提出了一种基于遗传算法的变论域模糊PID控制方法,进一步改善控制器的减振效果。试验结果表明,相比PID、模糊PID与未优化的变论域模糊PID等控制方法,基于遗传算法的变论域模糊PID控制方法在改善主动悬架的性能方面表现良好,对车辆行驶速度不确定性具有较强的鲁棒性。
2.1.4 神经网络控制
Mustafa等[29]提出了一种基于时滞控制和自适应神经网络控制相结合的非线性主动悬架系统控制器。在时滞控制的基础上,替换了模型的非线性和外部扰动,加入了径向基函数神经网络。为了展示基于时滞控制和自适应神经网络控制相结合的非线性控制器的性能,将其与传统被动悬架系统、延时控制、神经网络补偿和PID控制器在三种不同路面扰动下的性能进行了比较。仿真结果表明了所提方法的成功和有效性。Zhao和Gu[30]设计了一种基于径向基函数神经网络的主动悬架自适应PID控制器。使用径向基函数神经网络获得用于PID控制的比例、积分和微分环节的参数。对比了无控制悬架、基于径向基函数的PID控制和H_∞控制方法的控制效果。根据仿真结果,所提的控制方法优于其他方法,揭示了该控制方法的优越特性。Minh和Kwan[3l]设计了一种自适应神经网络反演控制方案。应用扩张状态观测器估计不确定参数、未建模动态和外部扰动,通过径向基函数神经网络逼近各类载荷的未知质量。试验结果表明,验证了所提方法的有效性。Hamza等[32]利用人工神经网络控制救护车的主动悬架系统,以减少振动对病人身体在救护车内受到的二次伤害。人工神经网络控制器主动悬架式救护车与传统救护车的性能进行对比试验,结果表明,在符合ISO2631—5和ISO8608标准的道路上,通过人工神经网络控制的主动悬架式救护车可以将病人和担架的振动减少70%以上。杨敏和曹从咏[33]进行了主动悬架系统振动控制的研究,研究对象是微型电动汽车。将模糊算法和神经网络结合,设计了模糊神经网络。仿真结果表明,即使控制回路存在时滞,该算法依然有效。Chen等[34]提出一种空气悬架系统的自适应神经网络控制方案,利用径向基函数神经网络解决悬架系统的模型不确定性和外界扰动问题。与模糊PID控制方法相比,该方法在精度和速度上都有显著提高,证明了该方法的可行性和优越性。
2.2现代控制方法
2.2.1滑模控制
Wei[35]根据新型趋近律的特点,设计了一种主动滑模控制方案,利用布谷鸟搜索算法确定了主动悬架滑模控制器的最佳参数。仿真结果显示,与传统滑模控制器相比,搭载主动滑模控制方案的主动悬架系统控制效果得到了进一步改善,证明了布谷鸟搜索算法对优化参数的可行性。Nguyen[36]提出滑模控制算法来控制主动悬架系统的运行。仿真结果表明,与使用被动悬架系统的车辆相比,搭载滑模控制算法控制的主动悬架系统的车辆,簧载质量的位移和加速度显着降低,分别降低了14.4%和14.1%。滑模控制算法的效果提升非常显著。Nguyen[37]提出最优滑模控制算法。试验结果显示,采用了最优滑模控制算法的主动悬架系统,簧下质量最大位移和平均位移数值均有显著降低。其与采用标准线性控制算法的主动悬架系统或被动悬架的车辆相比,在行驶工况时增强了车轮与路面的接触。Wang等[38]提出了一种基于滑模控制设计的主动悬架系统。控制器参数和系数通过二型模糊系统进行计算和更新,消除抖振现象。为了评估所提出的控制系统的性能,应用了道路的两模型不确定性。对主动悬架系统和被动悬架系统进行了对比仿真试验。仿真结果表明了所提出的滑模控制系统的高效性。Ahmad等[39]提出了一种基于自适应滑模的自抗扰控制方法。该控制方法核心思想是将自适应滑模控制精确跟踪参考轨迹的优点与自抗扰控制抑制参数不确定性和外部扰动的能力相结合。仿真结果表明,所提出的控制方案能够显著提高车辆的行驶平顺性和道路处理能力。将所提出的方法与线性自抗扰控制器和传统的比例—积分—微分控制器进行了比较。仿真结果表明,基于自适应滑模的自抗扰控制提高了对建模误差、非线性和扰动的鲁棒性。Flayyih等[40]采用积分滑模控制,结合非标准反步法设计了一种汽车主动悬架系统液压作动器。主动悬架系统的非线性、参数变化和路面干扰被积分滑模控制器所抑制。仿真结果表明,证明了所提控制器设计的有效性。
2.2.2 自适应控制
Zhang等[41]提出一种自适应神经网络优化控制方法,开发出虚拟和实际最优控制器。仿真结果表明所提控制方法降低了主动悬架的颤振,提高了液压作动器的可靠性。但并未考虑到引起液压作动器故障的其他原因,该仿真对作动器可靠性的提升较为有限。Nichiclea[42]提出的自适应谐波控制方法,该控制器基于车身加速度反馈产生幅值和频率可变的谐波控制信号。比较了多种主动悬架控制方法,在这些研究的控制算法中的唯一反馈数据是车身加速度。仿真结果经过对比分析表明,所提出的控制方案显示出相当好的控制性能,在某些情况下产生了比其他控制方法更好的结果。Deng等[43]提出了一种基于事件触发的自适应模糊最优控制方法。在传感器到控制器和控制器到执行器通道中都使用了事件触发机制,从而在双通道中实现了通信节省。为了保证最优的性能和稳定性,构造了两个独立的触发条件。仿真验证了所提方案的有效性。Acla等[44]提出了一种应对动态非线性和不确定性的自适应神经网络控制系统。为了克服非线性、参数不确定性和刚性外部扰动等动态现象,提出了一种自适应径向基函数神经网络与反步法控制系统相结合的方法。这种设置可以处理系统的非匹配模型不确定性,而自适应神经网络可以处理其未知的平滑函数。仿真结果表明了自适应神经网络控制的有效性。Zeng[45]提出一种基于动态事件触发条件的自适应神经控制技术,将主动悬架系统的垂直位移限制在可靠的范围内,保证了驾驶安全性和操纵稳定性,提高了乘坐舒适性,并通过仿真结果验证该控制技术的有效性。Guo等[46]研究了一种新颖的非线性自适应容错控制方法,它可以在没有昂贵的故障检测和隔离机制的情况下容纳多个执行器故障。仿真结果表明,在存在多个执行器故障、速度测量误差和外部干扰的情况下,所提出方法的有效性和优势。
2.2.3鲁棒控制
Cao等[47]使用多目标鲁棒控制性能,该控制器包括簧载质量加速度、悬架动挠度和轮胎动挠度。利用符号计算提出了一种求解带调节参数的半正定多项式的算法。仿真结果表明,与现有的其他主动悬架控制系统相比,该系统的控制性能得到了显著提高。Gong和Yan[48]设计了一种基于路面等级估计的鲁棒控制新方法。试验结果表明,通过调节鲁棒控制器的参数矩阵控制悬架的刚度和阻尼。所提出的控制方法可以在不同路面等级下改善乘坐舒适性和操纵稳定性。Dinh等[49]提出了一种电液作动器主动悬架鲁棒控制方法,在主回路中给出了一种反步滑模控制,通过产生虚拟控制力来保证车辆行驶品质的同时保证系统的稳定性和对系统整体扰动的鲁棒性。通过力促动器设计鲁棒控制来跟踪期望力。仿真表明,主动悬架的垂荡、纵摇和横摇3种运动中均方根值较小,从此提高了乘坐舒适性和操纵稳定性。周辰雨等[50]设计了侧翻工况预测和控制方法,设计了主动悬架抗侧翻鲁棒控制器。仿真结果表明,与半主动悬架和多目标控制主动悬架相比,该抗侧翻鲁棒控制器能够有效的防止车辆侧翻,提升了主动悬架的稳定性和车辆安全性。金贤建等[51]建立面向μ综合鲁棒控制的定向轮毂悬置吸振式主动悬架混合不确定系统动力学模型。仿真结果表明,设计的μ综合鲁棒控制器的综合性能优于定向轮毂悬置吸振式H_∞。μ综合鲁棒控制器能有效抑制轮毂主动悬架系统的垂向振动,即使在外界干扰和多参数摄动下仍能较好地提高车辆行驶的平顺性及乘坐舒适性。
2.2.4 预测控制
Johan等[52]提出了一个显式模型预测控制器的主动悬架系统,在一辆具有电控液压主动悬架系统的多功能车上进行仿真和试验,对该控制器进行了测试。结果表明,在频率小于4Hz的情况下,相对于天钩控制器,使用显式模型预测控制器,簧载质量的垂直加速度的均方根值降低了10%。在相同的频率范围内,显式模型预测控制器的加入将进一步提高上升和下沉加速性能8%至21%。Yao等[53]设计了一种基于主动悬架的直接转矩控制模型预测控制器。控制器实时调整倾斜角和横摆角速度,在实现路径跟踪的同时提高了车辆的抗侧翻能力。仿真结果表明,与传统的零滚转角控制相比,所提出的倾斜控制大大降低了车辆转弯时乘员感知的横向加速度和横向载荷转移比,并具有良好的路径跟踪性能。Niaona等[54]提出了一种基于多智能体的主动悬架系统分布式模型预测控制方法。联合仿真结果表明,该预测控制系统可以极大地减小车身的垂直加速度、俯仰加速度和侧倾加速度。特别是在转向工况下,可以同时兼顾车辆的安全性、舒适性和操控稳定性。Li等[55]提出了一种基于线性参数变化的模型预测控制方案,以增强速度相关主动悬架的阻尼控制。仿真结果表明,与被动悬架控制相比,主动悬架控制在变速工况下的性能有显著提高。Feng等[56]开发预测控制器,将转矩矢量控制与主动悬架系统进行集成控制器,用于增强主动悬架的垂向和纵向性能。为了减轻控制器设计负担,将半车动力学模型简化为线性时变模型。试验验证了控制器的有效性,保证了主动悬架稳定性,提高了车辆的舒适性。
2.3不同控制方法的优缺点分析
2.3.1不同控制方法的优点
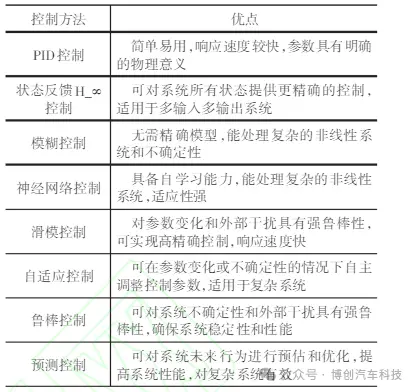
经典控制方法与现代控制方法的各优点如表1所
表1 不同控制方法的优点
2.3.2不同控制方法的缺点
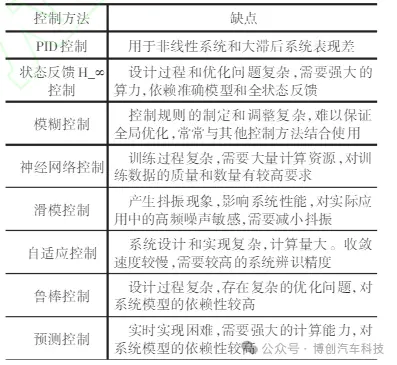
经典控制方法与现代控制方法的各缺点如表2所示。
表2不同控制方法的缺点
通过上述优点分析可看出不同的控制方法间存在着响应速度快、处理复杂的非线性系统、实现精确控制等相同的优点。对缺点的讨论是未来研究方向的依据,可将多种控制方法融合设计、互补,从而提升主动悬架的控制精度和速度。
3 主动悬架控制方法面临的挑战与未来研究方向
随着市场对高端车辆的需求增加,以及汽车新技术的迅速发展,对主动悬架的性能提出了更高的要求。主动悬架系统相较于被动悬架和半主动悬架具有巨大的发展潜力,但是主动悬架系统面临的挑战还有许多,其中主要包括4个方面:(1)主动悬架系统工作能量损耗大和能量回收率低;(2)主动悬架仿真研究条件设置理想化;(3)试验研究设备提供的工况与实际主动悬架系统运行工况有差距;(4)多系统融合控制有难度。为解决以上问题,应着重进行以下研究。
3.1主动悬架系统工作能量损耗大和能量回收率低
(1)电控液压主动悬架系统:液压泵正常工作需要电能,依靠发动机输出动力使发电机运行,发电机将电能输送至液压泵。液压泵需要维持或适应液压缸内的压力变化,需要持续工作,则其消耗电能过大,从而导致车辆能源消耗过大。
(2)电控空气悬架系统:该类空气悬架核心部件为空气弹簧,若橡胶材料的服役疲劳、耐久性及可靠性被破坏,则使电控空气悬架能耗增大;空气压缩机的负载会消耗部分发动机输出功率,对车辆的能源消耗增大,并且进行主动悬架能量回收难。
(3)电磁主动悬架系统:对于传统汽车而言,电磁主动悬架会消耗发动机功率或蓄电池的能量,无法进行主动悬架能量回收;对于电动汽车和混合动力汽车而言,使用电磁主动悬架能进行部分能量回收利用,但能量回收率低。因此,在碳中和、碳达峰背景下,通过控制方法减少主动悬架系统能量损耗和主动悬架能量回收利用是一个值得研究的问题
3.2 主动悬架系统仿真研究条件设置理想化
国内外已有的关于主动悬架系统控制方法的文献研究,大多文献均为仿真研究,再通过其仿真研究结果来验证控制方法是否有效。研究人员没有准确考虑仿真环境与实地测试环境之间的差异,仿真分析设置的边界条件趋于理想化,造成仿真数据与实测数据存在误差。今后应该考虑增加仿真分析条件的实际性。
3.3 试验研究设备提供的工况与实际主动悬架的运行工况有差距
部分研究人员在试验中设计了主动悬架台架设备,但并未将台架测试设备整合用于车辆上。该种试验方案未考虑到真实情况下环境影响因素和悬架系统组成部件对整车悬架系统的影响,且台架试验得出的研究结果往往与整车主动悬架试验存在差别,缺乏完整的试验装置去验证其试验结果,控制方法在该种环境中进行仿真得到的数据与实际工况亦存在差别。
后续研究应积极开展整车试验研究。将主动悬架与整车技术匹配,研发出能符合真实场景试验的主动悬架系统。
3.4 多系统融合控制有难度
国内外研究人员将两种及两种以上的控制方法和算法进行融合使用,例如将模糊控制与PID控制融合、自适应控制与神经网络控制融合、滑模控制与预测控制融合等。多系统融合控制是当前主动悬架控制方法的主流,通过融合控制方法可以提升主动悬架的控制精度和速度,是当前悬架技术发展亟需解决的问题。
4 结束语
主动悬架系统的设计和控制问题备受国内外研究学者的关注。本文综述国内外近几年主动悬架控制方法的相关研究。通过对主动悬架分类和发展概述,对比分析了经典控制方法和现代控制方法,不同的控制方法间存在着响应速度快、处理复杂的非线性系统、实现精确控制等相同的优点。提出了主动悬架控制方法面临的挑战与未来研究方向。当前主动悬架控制方法越来越多,未来不仅局限于仿真试验,将会有更多的试验研究设备提供的工况与实际主动悬架的运行工况相匹配,多系统融合控制方法应用于主动悬架系统越来越多,主动悬架的控制精度和速度也会得到提升,并且主动悬架系统的能源消耗及能量回收率低也是值得深入探讨的研究主题。
参考文献
[1]余强,郑慕侨.汽车悬架控制技术的发展[J].汽车技术,1994(9):1-6.
[2] HROVAT D. Survey of Advanced Suspension Developments and Related Optimal Control ApplicationsJ]. Automatica (Jourmal of IFAC). 1997, 33(10):1781-1817.
[3]李仲兴,沈安诚,江洪,电控空气悬架多智能体博弈控制系统研究[J].汽车工程,2020,42(6):793—800+831.
[4] ZHAO R. XIE H, GONG X. et al. Neural Network-based Adaptive Height Tracking Control of Active Air Suspension System with Magnetorheological Fluid Damper Subject to Uncertain Mass and Input Delay[J]. Sensors, 2023, 24(1):156.
[5] SUN L SU L LI Z, et al. Research on Design and Characteristic of a New Type of Air Suspension System with Magnetic Negative Quasi-Zero StiffnessJ]. The Journal of Automobile Engineering, 2024. 238(2-3):374-384.
[6] WANG W B. LIU S. ZIIAO D X, et al. Approximation-Free Output Feedback Control for Hydraulic Active Suspensions with Prescribed Performance[J]. Nonlinear Dynamics, 2023. 111(23):21673-21689.
[7]王军年,刘哲,孟令帅,等,兼具馈能与主动抗侧倾功能的电控液压悬架系统设计与研究[].汽车工程学报,2023.13(3):396-407.
[8]寇发荣,陈若晨,胡凯仑,等.电磁混合主动悬架滑模容错控制研究[J].现代制造工程,2023(8):66—74.
[9]孙凤,邢大壮,周冉,等.考虑能耗的电磁主动悬架LQR控制策略[J].西南交通大学学报,2023.58(4):754—760+798
[10]刘锦超,李军伟,陈斌,等.乘用车电控空气悬架高度控制策略[].液压与气动,2024,48(2):108—115.
[11]杨辉.汽车电控悬架的现状及趋势[J].装备制造技术。2013(4):204-206.
[12]殷珺,罗建南,喻凡.汽车电磁式主动悬架技术综述[J].机械设计与研究,2020.36(1):161—168.
[13]凌晨.全主动悬架的产业化应用综述[].汽车工业研究,2023(3):22-25.
[14]詹长书,苏立庆,基于粒子群优化的主动悬架PID控制策略[J].科学技术与工程,2022,22(10):4180—4186.
[15] MA S, LI Y, TONG S. Research on Control Strategy of Seven-DOF Vehicle Active Suspension System based on Co-Simulation[ J/OL]. Measurement and Control. 2023, 56 (7-8).https:/doi.org/10.1177/00202940231154.
[16] HU Y. LIU J. WANG Z, et al. Research on Electric Oil Pneumatic Active Suspension based on Fractional-Order PID Position Control[J]. Sensors, 2024. 24(5): 1644.
[17] PARVEZ Y. CHAUIIAN N R. SRIVASTAVA M. Vibration Control and Comparative Analysis of Passive and Active Suspension Systems Using PID Controller with Particle Swarm OptimizationJ]. Journal of the Institution of Engineers (India): Series C. 2024: 1-19.
[18] JIN X. WANG J. SUN S. et al. Design of Constrained Robust Controller for Active Suspension of In-Wheel-Drive Electric Vehicles[J]. Mathematics, 2021.9(3):249.
[19]李杰,贾长旺,成林海,等,脉冲路面下电动汽车主动悬架状态反馈H∞控制[J].湖南大学学报(自然科学版),2022,49(8):12-20.
[20]王刚,李昆鹏,景晖,等.基于Q学习的整车主动悬架免参数H_∞控制[J].汽车工程,2023,45(12):2260—2271.
[21] ARIVAZIIAGAN A. ARUNACHALAM K. Combined Input -Output Finite-time Stability with II e Static Output- feedback Control Approach for Active Suspension[J]. IETE Journal of Research, 2023,69(8):5473-5483.
[22] WEI C Y. Modeling and Simulation of Active Half-vehicle Suspension based on a New Output-feedback II o ControllerJ]. International Journal of Control. Automation and Systems, 2024, 22(3):775-784.
[23] ZHANG P. YUE H J. SHI Z Y. et al. A Fuzzy PID Algorithm-based Attitude Control Method of Suspension- Type Small Rail Vehicles[J]. Journal of Vibration Engineering & Technologies, 2021, 10(1):1-20.
[24] KHAN M A. HAROON S. AHMAD E, et al. Active Slip Control of a Vehicle Using Fuzzy Control and Active Suspension[J]. Automatika, 2021, 62(3-4):386-396.
[25] HAN S Y. DONG J F. ZHOU J. et al. Adaptive Fuzzy PID Control Strategy for Vehicle Active Suspension Basèd on Road evaluation[J]. Electronics. 2022, 11(6):921.
[26] YIN Z, SU R. MA X. Dynamic Responses of 8-DoF Vehicle with Active Suspension: Fuzzy-PID ControllJ]. World Electric Vehicle Journal, 2023. 14(9):249.
[27] JI GG. ZHANG L D. SHAN M Y. et al. Enhanced Variable Universe Fuzzy PID Control of the Active Suspension based on Expansion Factor Parameters Adaption and Genetic AlgorithmJ]. Engineering Research Express, 2023, 5(3):035007.
[28]薛文平,张春玲,基于遗传算法的汽车主动悬架变论域模糊PID控制[.江苏大学学报(自然科学版),2024,45(1): 8-15.
[29] MUSTAFA Y I G. LI X. WANG H. A New Neural Network-based Adaptive Time-Delay Control for Nonlinear Car Active Suspension SystemJ]. Studies in Informatics and Control, 2022, 31(4):13-24.
[30] ZIIAO W. GU L. Adaptive PID Controller for Active Suspension Using Radial Basis Function Neural Networks [J]. Actuators, 2023,12(12):437.
[31] MINH C H, KWAN K A. Extended State Observer-based Adaptive Neural Networks Backstepping Control for Pneumatic Active Suspension with Prescribed Performance Constraint[J]. Applied Sciences, 2023,13(3):1705-1705.
[32] IIAMZA A. YAIIIA N B. Artificial Neural Networks Controller of Active Suspension for Ambulance based on ISO StandardsJ]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering. 2023. 237(1):34-47.
[33]杨敏,曹从咏.微型电动汽车主动悬架系统振动控制仿真[J].计算机仿真,2023,40(10):167—171.
[34] CHEN Z. ZHANG J. Adaptive Neural Network Control of Heavy Vehicle Air Suspension with Uncertainties[]. Journal of Vibration Engineering & Technologies. 2024: 1- 17.
[35] WEI S, SU X Optimization of the New Index Reaching Law of the Active Suspension Sliding Mode Controller based on the Cuckoo Search Algorithm[EB/OL]. (2021- 10-26)[2024-04-25].https:/www.hindawi.com/journals/ complexity/2021/5585327/.
[36] NGUYEN T. Advance the Efficiency of an Active Suspension System by the Sliding Mode Control Algorithm with Five State Variables[J]. IEEE Access. 2021.9:164368-164378
[37] NGUYEN D N. NGUYEN T A. Enhancing the performance of the vehicle active suspension system by an Optimal Sliding Mode Control algorithm.[J]. PloS one. 2022.17(12): e0278387.
[38] WANG Z, RAN L. KONG B. et al. Suspension System Control based on Type-2 Fuzzy Sliding Mode Technique [J/OL]. Complex. (2022-01-01)[2024-06-24]. https:/doi. org/10.1155/2022/2685573.
[39] AHMAD SS. ABID M B. SHOEB H. Adaptive Sliding Mode-based Active Disturbance Rejection Control for Vehicle Suspension ControllJ]. Journal of Systems and Control Engineering. 2022, 236(8):1523-1533.
[40] FLAYYIII M A. HHAMZAH M H. HASSAN J M. Nonstandard Backstepping based Integral Sliding Mode Control of Hydraulically Actuated Active Suspension SystemlJ]. Intemational Journal of Automotive Technology. 2023,24(6):1665-1673.
[41] ZHANG J. LI K. LI Y. Neuro-Adaptive Optimized Control for Full Active Suspension Systems with Full State Constraints[]. Neurocomputing,2021,458:478-489.
[42] NICHIELEA T C. UNGURITU M G. Design and Comparisons of Adaptive Harmonie Control for a Quarter- Car Active SuspensionJ]. Journal of Automobile Engineering, 2022,236(2-3):343-352.
[43] DENG Y. GONG M. NI T. Double-Channel Event- Triggered Adaptive Optimal Control of Active Suspension Systems[J]. Nonlinear Dynamics, 2022, 108(4):3435- 3448.
[44] AELA A M A. KENNE J P. MINTSA H A. Adaptive neural network and nonlinear electrohydraulic active suspension control systemlJ]. Journal of Vibration and Control. 2022. 28(3-4):243-259.
[45] ZENG Q. ZHAO J. Dynamic Event-Triggered-Dased Adaptive Finite-Time Neural Control for Active Suspension Systems with Displacement Constraint[J]. IEEE Transactions on Neural Networks and Learning Systems, 2022,35(3):4047-4057.
[46] GUO X, WANG J, SUN W. Nonlinear Adaptive FaultTolerant Control for Full-ear Active Suspension with Velocity Measurement Errors and Full-State Constraints [J]. Journal of the Franklin Institute, 2024, 361(10):106845
[47] CAO Z. ZHAO W. HOU X. et al. Multi-Objective Robust Control for Vehicle Active Suspension Systems via Parameterized Controller[J]. IEEE Access. 2019, 8:7455- 7465
[48] GONG M, YAN X. Robust Control Strategy of Heavy Vehi- cle Active Suspension based on Road Level EstimationlJ]. International Joumal of Automotive Technology, 2021,22 (1):141-153.
[49] DINHI G K. NGUYEN H V. LE D T. et al. Extended State Observer based Robust Control for Active Suspensions with Electro-Hydraulic Actuators[C//2023 12th Interna- tional Conference on Control. Automation and Information Sciences (ICCAIS). Ilanoi, Vietnam: IEEE. 2023: 471- 476.
[50]周辰雨,易莎,余强,等.概率融合的抗侧翻智能主动悬架控制研究[J.控制工程,2024,31(1):126—133.
[51]金贤建,王佳栋,徐利伟,等.轮毂电机驱动电动汽车主动悬架μ综合鲁棒控制研究[J/OL].机械工程学报,(2024-03-27)[2024-06-14].http:/kns.cnki.net/kcms/ detail/11.2187.TH.20240322.1652.022.html.
[52] JOHAN T, ALDO S. PATRICK G, et al. Regionless Explicit Model Predictive Control of Active Suspension Systems with PreviewJ]. IEEE Transactions on Industrial Electronics, 2020.67(6):4877-4888.
[53] YAO J L. WANG M. LI Z H. et al. Research on Model Predictive Control for Automobile Active Tilt based on Active Suspension[J]. Energies. 2021. 14(3): 671-671.
[54] NIAONA Z. SHENG Y. GUANGYI W. et al. Fast Distributed Model Predictive Control Method for Active Suspension Systems[J]. Sensors, 2023. 23(6):3357-3357.
[55] LI Q, CHEN Z. SONG et al. Model Predictive Control for Speed-Dependent Active Suspension System with Road Preview Information[J]. Sensors,2024.24(7): 2255.
[56] FENG J. LIANG J. LU Y. et al. An Integrated Control framework for Torque Vectoring and Active Suspension SystemJ]. Chinese Journal of Mechanical Engineering. 2024,37(1):1-12.
[57]王文林,侯之超,邹军.汽车空气悬架研究进展:零部件与系统[].汽车安全与节能学报,2018,9(1):11—24.







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
