




 广告
广告





















































“端到端”自动驾驶的安全问题

2.1 端到端技术原理
端到端自动驾驶技术,是一种直接从原始传感器数据到车辆控制指令的映射技术,其核心在于利用深度学习神经网络,跳过传统自动驾驶中复杂的中间模块处理过程,实现端到端的直接控制。在端到端自动驾驶系统中,传感器(如摄像头、雷达、激光雷达等)收集车辆周围环境的原始数据 。这些数据包含了丰富的信息,如道路状况、车辆位置、周围障碍物等。以摄像头为例,它捕捉到的图像数据是高分辨率、多维度的,包含了车辆前方道路的颜色、纹理、形状等细节信息;激光雷达则通过发射激光束并接收反射信号,获取周围物体的距离信息,形成点云数据,精确地描绘出周围环境的三维轮廓。
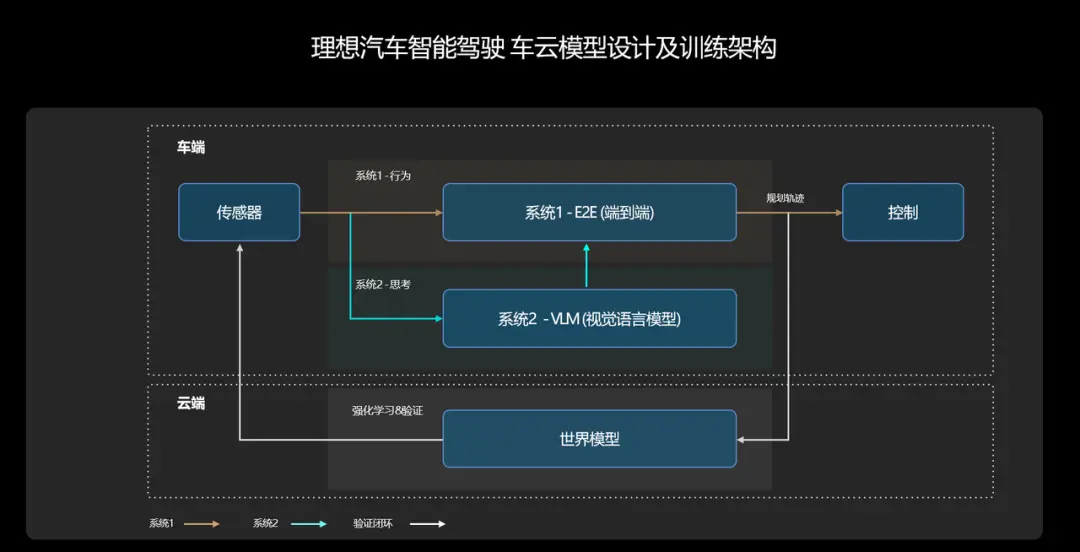
图 2:端到端自动驾驶技术神经网络架构图
这些原始数据被直接输入到深度神经网络中,神经网络包含多个隐藏层,每个隐藏层由大量的神经元组成。在数据的正向传播过程中,神经元通过复杂的权重和激活函数对输入数据进行层层特征提取和变换 。例如,在图像数据处理中,卷积神经网络(CNN)的卷积层通过卷积核在图像上滑动,提取图像中的边缘、纹理等低级特征;随着数据在网络中的传递,后续的层逐渐提取出更高级、更抽象的特征,如车辆、行人、交通标志等目标物体的类别和位置信息。在这个过程中,神经网络自动学习数据中的模式和规律,从原始数据中挖掘出与驾驶决策相关的关键信息,如前方道路是否畅通、是否有障碍物需要避让等。最终,经过神经网络的处理,输出车辆的控制指令,如转向角度、加速或减速指令、制动指令等 。这些指令直接作用于车辆的执行机构,实现车辆的自动驾驶。
2.2 与传统自动驾驶技术对比
传统自动驾驶技术采用模块化架构,将整个驾驶任务分解为感知、定位、预测、决策、规划和控制等多个独立模块,每个模块完成特定的子任务,然后通过预定义的接口进行数据传递和协同工作 。例如,感知模块利用传感器数据识别周围环境中的物体,如车辆、行人、交通标志等;定位模块通过 GPS、惯性导航等技术确定车辆的位置;决策模块根据感知和定位的结果,结合交通规则和地图信息,制定驾驶决策,如是否加速、减速、转弯等;规划模块则根据决策结果,生成具体的行驶路径;控制模块根据规划路径,控制车辆的转向、加速、制动等操作。
与传统自动驾驶技术相比,端到端自动驾驶技术具有多方面的优势。在系统复杂度方面,端到端技术通过消除模块间的人工定义接口,将多个模块的功能整合在一个统一的神经网络模型中,大大简化了系统架构 。以特斯拉的端到端自动驾驶系统为例,其直接从摄像头图像数据生成车辆控制指令,避免了传统模块化架构中多个模块之间复杂的接口设计和数据交互,减少了系统集成的难度和潜在的故障点。在数据处理上,端到端技术能够最大程度地保留原始数据的细节信息,避免了模块化架构中由于数据在不同模块间传递和转换而导致的信息损耗 。例如,在传统的感知模块中,将传感器数据转换为语义信息(如障碍物类别和位置)时,会丢失很多原始数据的动态特征;而端到端技术直接对原始数据进行处理,能够更好地捕捉环境中的复杂信息,提升系统在复杂场景下的应对能力。
在代码量上,端到端技术由于减少了模块间的协调和管理代码,代码量相对传统技术大幅减少 。这不仅降低了开发和维护的工作量,还提高了代码的可读性和可维护性。以某自动驾驶项目为例,采用传统模块化架构时,代码量达到数十万行,而转换为端到端架构后,代码量减少了约三分之一,同时系统的开发周期也缩短了约 20%。端到端技术还具有更强的迭代能力,通过不断地更新训练数据和优化神经网络模型,能够快速适应新的驾驶场景和需求,提升系统的性能 。而传统模块化架构由于各个模块相对独立,更新和优化一个模块可能会影响到其他模块的兼容性,导致迭代速度较慢。
3.1 黑盒特性解析
端到端自动驾驶模型就像一个神秘的黑盒,其内部运行机制和推理过程如同隐藏在迷雾之中,难以被清晰地洞察和理解 。在传统的自动驾驶系统中,各个模块的功能和处理逻辑相对明确,例如在感知模块中,基于规则的算法可以清晰地解释如何识别交通标志和车辆,通过特定的图像特征匹配和分类算法,能够明确指出是哪些特征被用于判断目标物体的类别。而在端到端模型中,原始传感器数据直接输入到深度神经网络,经过多层复杂的神经元变换和非线性映射后,直接输出车辆的控制指令 。这个过程中,神经网络内部的权重调整、特征提取以及决策制定过程都是高度自动化和数据驱动的,缺乏直观的、可解释的逻辑步骤。
以特斯拉的 FSD 系统为例,它采用端到端的架构,通过摄像头采集的图像数据直接输入到神经网络中,神经网络经过训练学习到从图像到车辆控制指令的映射关系 。当车辆在行驶过程中遇到前方有行人的场景时,FSD 系统能够快速做出减速或避让的决策。然而,研发人员很难确切地解释神经网络是如何从摄像头捕捉到的图像中判断出前方行人的存在,以及为什么选择了特定的减速或避让策略。这是因为神经网络中的决策过程是基于大量的训练数据和复杂的数学计算,涉及到数百万个神经元的协同工作,每个神经元的激活和权重调整都受到众多因素的影响,使得整个决策过程变得难以剖析和解释 。
图 3:端到端模型黑盒特性示意图
3.2 不可解释性引发的安全隐患
端到端自动驾驶模型的不可解释性在实际应用中引发了一系列严重的安全隐患 。由于无法理解模型的决策依据,当遇到异常情况或罕见场景时,模型的决策可能会变得不可预测,导致车辆做出危险的行为。特斯拉在应用端到端系统后,曾出现过车辆冲上路肩的事故。在夜间行驶时,由于光线条件复杂,传感器采集到的图像数据可能存在噪声或干扰,端到端模型在处理这些数据时,可能会因为无法准确理解环境信息而做出错误的决策 。例如,将路边的阴影或反光物体误判为道路边界,从而导致车辆偏离正常行驶轨迹,冲上路肩,造成轮胎撞瘪等损坏,严重威胁到车内人员和道路上其他交通参与者的安全。
在一些复杂的交通场景中,如道路施工、交通标志被遮挡或模糊不清时,端到端模型的不可解释性也会带来决策风险 。由于模型无法清晰地解释其对环境信息的理解和决策过程,当遇到这些特殊情况时,很难确定模型是否能够准确地感知到危险并做出正确的应对措施。如果模型错误地解读了被遮挡的交通标志,或者未能识别出道路施工区域的障碍物,可能会导致车辆继续按照正常的行驶模式行驶,从而引发碰撞事故 。在实际道路测试中,就曾发生过端到端自动驾驶车辆在遇到道路施工场景时,没有及时减速或避让,直接闯入施工区域,与施工设备发生碰撞的事件,这充分说明了端到端模型不可解释性所带来的安全隐患。



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
