




 广告
广告





















































“端到端”自动驾驶的安全问题

1. 多模态传感器融合策略:
为了提高自动驾驶系统的感知准确性和可靠性,采用多模态传感器融合策略是一种有效的途径。多模态传感器融合是指将来自不同类型传感器的数据进行整合和处理,充分发挥各传感器的优势,实现对环境信息的全面、准确感知 。常见的多模态传感器包括摄像头、雷达和激光雷达等,它们各自具有独特的感知能力和特点。
摄像头能够提供丰富的视觉信息,包括道路场景的颜色、纹理、形状等,对于识别交通标志、车辆、行人等目标具有重要作用 。不同类型的摄像头,如前视、后视、环视摄像头等,可以覆盖不同的视角范围,为自动驾驶系统提供全方位的视觉感知。前视摄像头可以捕捉车辆前方的道路信息,用于识别前方的障碍物、交通信号灯和车道线等;后视摄像头可以帮助驾驶员观察车辆后方的情况,在倒车或变道时提供辅助;环视摄像头则可以提供车辆周围 360 度的全景图像,帮助驾驶员更好地了解车辆周围的环境 。
雷达通过发射电磁波并接收反射波来测量目标物体的距离、速度和角度等信息,具有不受光照和天气条件影响的优点,在夜间或恶劣天气下仍能保持较好的性能 。毫米波雷达是一种常用的雷达类型,它工作在毫米波频段,具有较高的分辨率和测速精度,能够实时监测车辆周围目标物体的运动状态,为自动驾驶系统提供重要的距离和速度信息 。
激光雷达则通过发射激光束并接收反射光来获取目标物体的三维空间信息,能够构建高精度的环境地图,对于障碍物的检测和定位具有极高的准确性 。它可以快速、准确地获取周围环境的点云数据,精确地描绘出道路、建筑物、车辆和行人等物体的形状和位置,为自动驾驶系统提供精确的三维感知信息 。
为了实现多模态传感器数据的有效融合,需要采用合适的融合策略和算法 。常见的融合策略包括数据层融合、特征层融合和决策层融合。数据层融合是指在原始数据层面直接将不同传感器的数据进行融合,然后再进行统一的处理和分析 。将摄像头采集的图像数据和激光雷达获取的点云数据在早期阶段进行融合,共同输入到后续的处理模块中,充分利用两种数据的互补信息 。
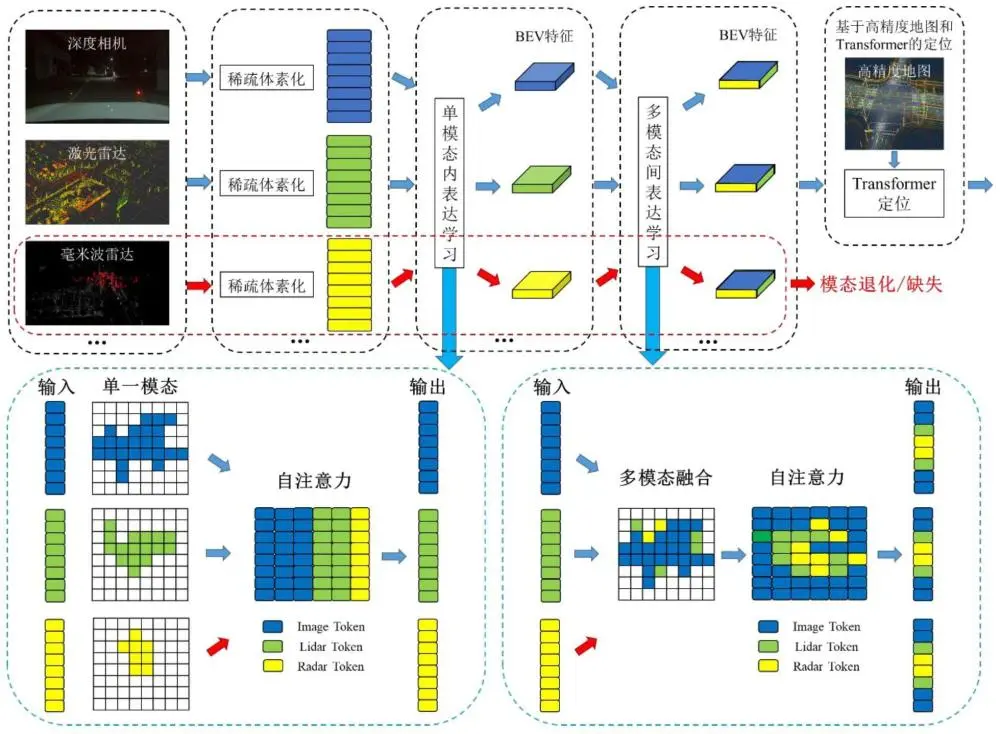
图 5:多模态传感器融合架构图
特征层融合是指先对各个传感器的数据进行特征提取,然后将提取到的特征进行融合,再进行后续的分析和决策 。分别从摄像头图像中提取视觉特征,从雷达数据中提取距离和速度特征,然后将这些特征进行融合,形成一个综合的特征向量,用于后续的目标识别和决策 。
决策层融合则是指各个传感器独立进行处理和决策,然后将各自的决策结果进行融合,最终得出综合的决策 。摄像头和雷达分别对前方目标物体进行检测和识别,并做出相应的决策,如是否需要减速或避让,然后将这些决策结果进行融合,根据融合后的结果来控制车辆的行驶 。
2. 基于融合数据的决策机制改进:
在获取多模态传感器融合数据后,需要进一步优化决策机制,以提高自动驾驶系统的决策合理性和安全性 。一种有效的方法是采用强化学习等算法,让自动驾驶系统在与环境的交互中不断学习和优化决策策略 。强化学习是一种基于奖励机制的学习方法,它通过让智能体在环境中采取行动,并根据行动的结果获得奖励或惩罚,来不断调整自己的行为策略,以最大化长期累积奖励 。
在自动驾驶中,强化学习算法可以将车辆的当前状态(包括传感器数据、车辆位置、速度等)作为输入,输出车辆的控制动作(如加速、减速、转向等) 。通过不断地与环境进行交互,系统可以根据每次行动的结果(如是否成功避开障碍物、是否遵守交通规则等)获得相应的奖励或惩罚,从而逐渐学习到最优的决策策略 。当车辆遇到前方有行人横穿马路的场景时,强化学习算法可以根据行人的位置、速度以及车辆与行人的距离等信息,选择合适的减速或避让动作。如果车辆成功避开了行人,系统会获得正奖励;如果发生了碰撞或其他危险情况,系统会获得负奖励 。通过不断地学习和调整,系统可以逐渐掌握在各种复杂场景下的最佳决策策略,提高自动驾驶的安全性和可靠性 。
为了更好地利用多模态融合数据,还可以结合深度学习等技术,构建更加智能的决策模型 。利用卷积神经网络(CNN)对摄像头图像进行处理,提取视觉特征;利用循环神经网络(RNN)对雷达和激光雷达数据进行处理,捕捉时间序列信息 。然后将这些特征进行融合,并输入到决策模型中,通过模型的学习和训练,实现对复杂交通场景的准确理解和合理决策 。在面对复杂的十字路口场景时,决策模型可以综合分析摄像头捕捉到的交通信号灯状态、其他车辆和行人的行为,以及雷达和激光雷达提供的距离和速度信息,做出安全、高效的行驶决策,如是否通过路口、何时加速或减速等 。



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
