




 广告
广告





















































使用示波器对三相电机驱动器进行测量

概述
本指南将介绍如何使用泰克8通道5系列B MSO示波器的逆变器、电机和驱动器分析软件对变频驱动器的输入、直流母线和输出进行稳定、准确的电气测量,以及对电机进行机械测量。

大多数现代电机驱动系统使用某种调制形式来控制电机频率,从而控制电机速度。在大多数情况下,此类变频驱动器 (VFD) 通过输出精心控制的脉冲宽度调制 (PWM)波形来实现这一点。此类系统通常以三相形式输出功率,因为三相是电机的最佳配置。
自电气工程诞生以来,三相交流感应电机(ACIM) 一直是工业领域的主力。它们可靠、高效、成本低且几乎不需要维护。但电机和驱动器有多种不同类型。交流感应电机(ACIM) 的效率低于无刷直流电机 (BLDC) 和永磁同步电机 (PMSM)。与交流感应电机相比,同步无刷直流电机和永磁同步电机效率更高,重量也更轻,但需要更先进的控制算法。
尽管每种类型的电机驱动系统有其独特的特性,但电机驱动器都使用脉冲宽度调制技术来改变输送到电机的频率和电压。
图1. 电机驱动器通过调节电机输入来控制电机速度和扭矩
对电机驱动器进行测量的挑战
由于电机驱动器输出采用脉冲宽度调制技术,因此,要对这种信号进行稳定的测量具有挑战性。要想实现稳定的波形,通过人工确定滤波器和触发器的正确组合非常棘手,但对于实现一致测量却是必要的。
除了测量驱动器的输出之外,对驱动器的输入级性能(例如谐波、功率和功率因数)进行测量和评估也很重要。虽然可以将原始波形导出到电子表格或其他分析软件中,但该过程非常耗时,并且设计算法时要特别注意。
进行这些测量需要与被测设备建立许多连接。错误的探头连接和连接点完整性差是导致电机驱动器测量误差的常见原因。
机械测量也很关键,可以使用传感器进行。然而,如果不进行自定义处理和转换,要想获取以工程单位表示的速度、加速度或扭矩的测量值可能非常困难,甚至是不可能。
由于这些原因,要想使用示波器对电机驱动系统进行良好的测量,需要仔细的设置、稳定的波形和强大的测量算法。
PWM电机驱动器的工作原理
多种类型的电机采用脉冲宽度调制 (PWM) 形式驱动,包括有刷直流电机、交流感应电机、无刷直流电机和永磁同步电机。PWM使驱动器能够改变输送到电机的频率和电压。
尽管很多年前人们就已经掌握PWM驱动器的工作原理,但却是功率半导体、控制电子组件和微处理器的改进和成本的降低才推动了此类驱动器的广泛使用。矢量控制技术进一步推动了这一趋势。通过矢量控制,设计者能够在交流电机的高可靠性基础上,实现直流电机的高效率和精确可控性。无刷直流电机和永磁同步电机正在广泛应用领域取代有刷直流电机和交流感应电机,这些领域不仅包括工业应用,还包括电动工具、家用电器和电动汽车。
图2显示了三相变频驱动器基本元件的框图。
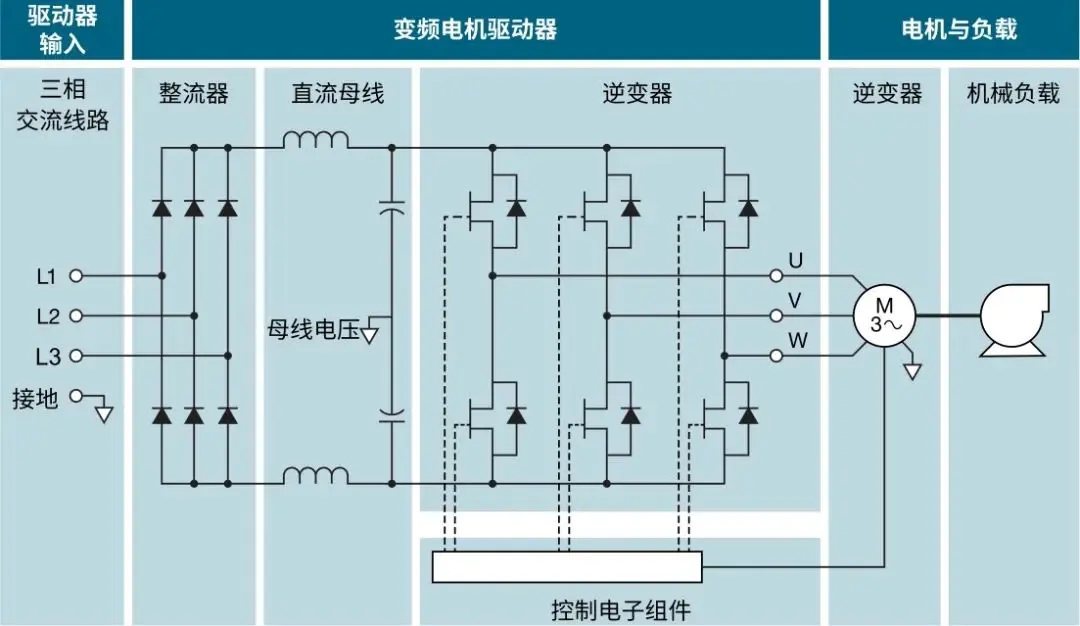
图2. 三相电机驱动器功能模块图
PWM驱动器可以由直流电、单相交流电或三相交流电供电。图2显示了一台由三相电源供电的变频驱动器,三相电源常用于工业设备。三相电源经过整流和滤波产生直流母线,为驱动器的逆变器部分供电。逆变器由三对半导体开关(MOSFET、GTO、功率晶体管、IGBT等)及其相关二极管组成。每对开关分别为电机的一相提供电源输出。这种基本架构可以适用于多种类型的电机,但控制电子组件在反馈和复杂性方面差异很大。这里简单介绍几种常见的用于驱动电机的PWM形式。
六步换相 / 梯形波控制驱动器
这种类型的驱动器与无刷直流电机结合使用。无刷直流电机效率高且体积小。它具有直流电机的优点,但没有电刷,不易磨损。无刷直流电机可以通过相对简单的六步换相(或梯形波控制)PWM策略来实现电子换向。下图显示了一组典型的PWM波形。
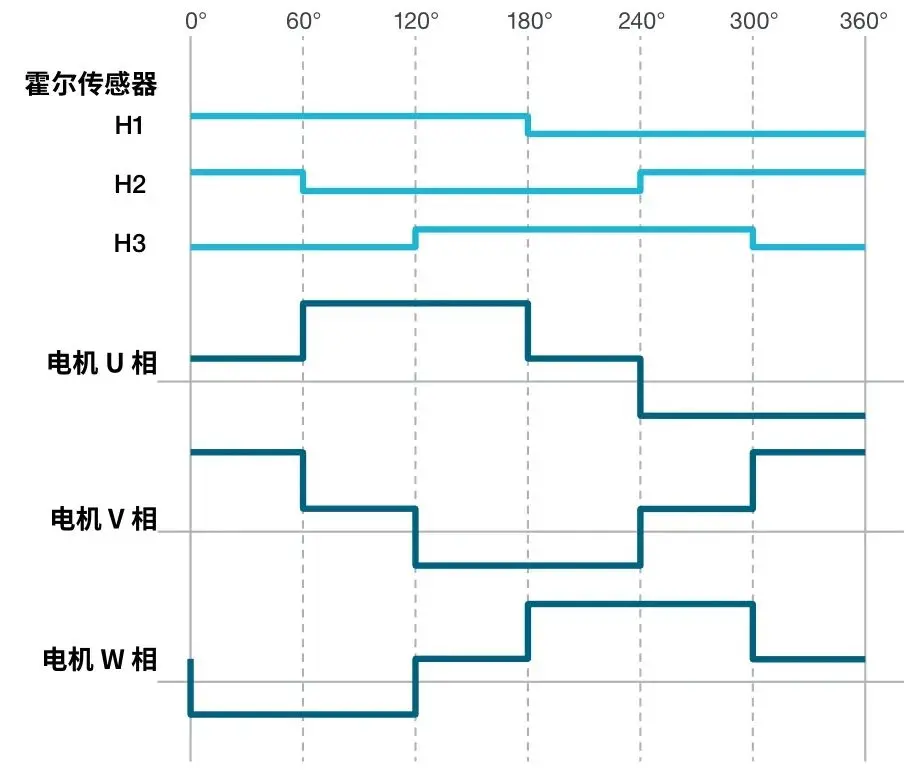
图3. 霍尔传感器向简单的六步控制器提供反馈。驱动器U、V和W输出信号应用于电机定子
标量控制驱动器
简单的变频驱动器驱动交流感应电机,通过改变驱动电机的PWM波形的基频来控制电机速度。为了保持全扭矩,驱动器中的控制系统会保持PWM波形的电压 / 基频比率。这类驱动器被称为标量控制驱动器。
控制电子组件产生三个相位差为120°的低频正弦波,用于调节每对开关的脉冲宽度。
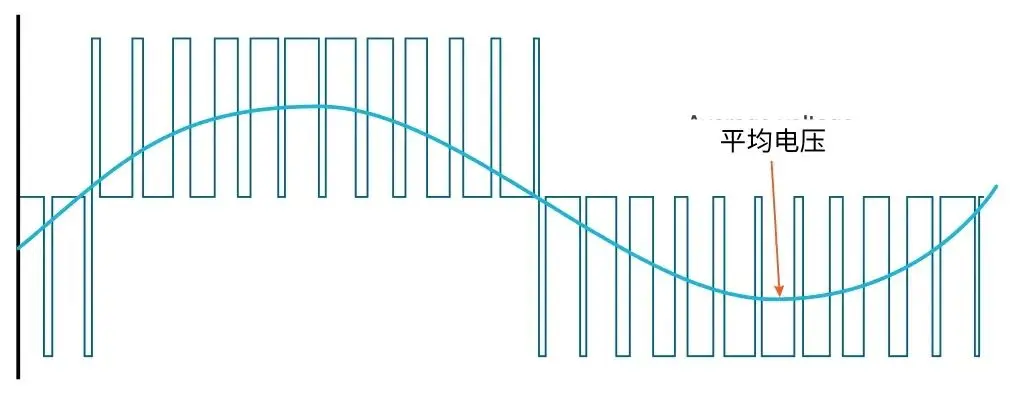
图4. A相和B相之间的脉冲宽度调制波形的平均线电压是正弦波
电机绕组的平均电压近似正弦波。电机绕组的另外两相具有相似的平均电压,相差120°。
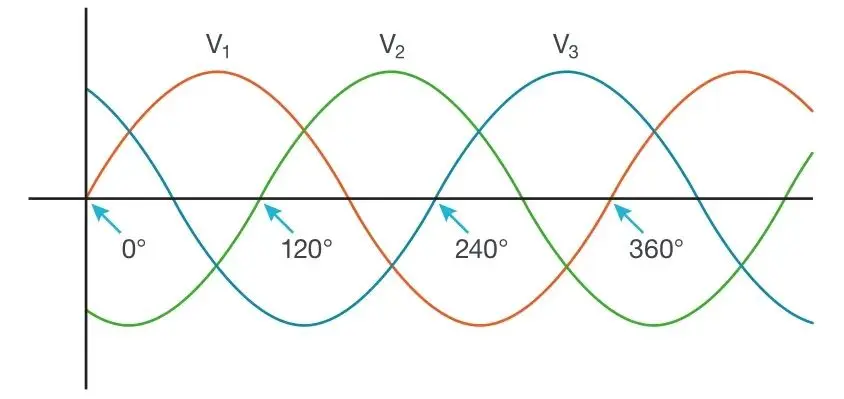
图5. 随时间变化的三相电压信号
从逆变器输出电压的角度来看,电机在很大程度上类似于一个电感器。由于电感器对较高频率具有较高阻抗,因此电机所吸收的大部分电流来自于PWM波形输出中的较低频率分量。因此,电机所吸收的电流形状近似正弦波。
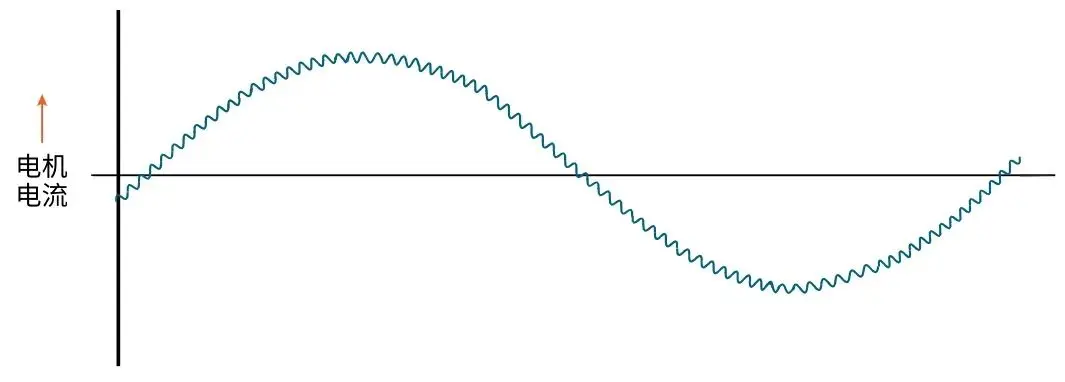
图 6. 由于电机是感性负载,且能阻抗快速电流变化,因此电机所吸收的电流近似正弦波
通过控制调制波形的幅度和频率,以及控制电压和频率比,PWM驱动器可以提供三相电源,以驱动电机达到所要求的速度。
矢量控制驱动器 / 磁场定向控制
交流感应电机和同步电机的驱动器更先进,采用矢量驱动技术。此类驱动器比标量控制驱动器更灵活、更高效,但也更复杂。
矢量控制驱动器与标量控制驱动器的相似之处在于它们都使用正弦电流驱动电机,但是矢量控制驱动器的运行更平稳,加速更快,扭矩控制也更好。此类控制系统通常使用磁场定向控制 (FOC),并且比标量控制驱动器复杂得多。
矢量D和矢量Q是正交矢量,其大小与电机的扭矩和磁通量有关。
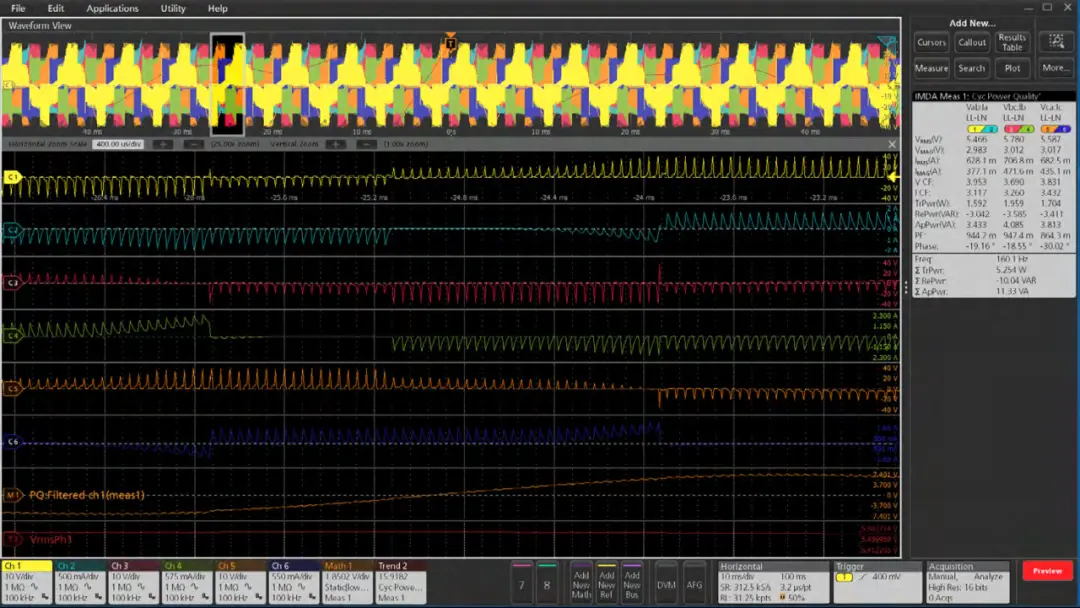
图7. 矢量控制 / 磁场定向控制使用复杂的PWM波形
控制系统必须测量转子的位置以使系统同步。这通常通过使用霍尔传感器或正交编码器接口 (QEI) 等传感器来实现(还会使用无传感器系统,其中控制系统使用电机的反电动势来确定转子位置)。控制器使用Clarke变换和Park变换来计算矢量D和矢量Q的幅值,然后使用这些值作为控制回路的设定点。
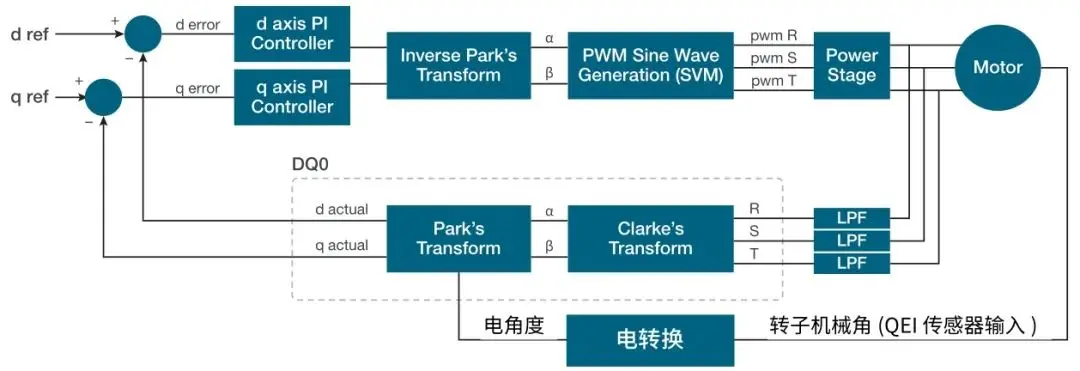
图8. 矢量控制系统框图
变频驱动器系统的连接
示波器探头的选择
对变频驱动系统进行功率测量需要使用电压和电流探头。选择示波器电压探头进行电机驱动器测量时,一定要考虑以下几点:
• 电机驱动器测量涉及相对较高的电压。例如,480V 三相电机驱动器中的直流母线电压通常约为680V。切记确认探头尖端的额定电压以及用于连接探头的配件的额定电压。
• 共模电压也可能相对较高。也就是说,测量结果通常相对于地面是“浮动”的,因此不能使用接地参考的探头。务必确保信号浮动不超过探头的共模电压额定值。
• 大多数相关频率低于200MHz,因此具有此带宽的探头足以满足大多数日常测量需求。
• 探头应能用于广泛的测量任务。
出于这些原因,通常建议使用高压差分探头作为功率电子逆变器子系统、驱动器输入/输出和控制系统测量的通用电压探头。


图9. 泰克差分探头(例如THDP0200)和泰克AC/DC电流探头(例如TCP0030A)为许多变频驱动器测量场景提供了良好的覆盖范围。
注:接地参考无源探头不应用于测量相电压。中性端子可能不在接地电位,从而导致大量电流流过探头和示波器接地。这很危险,可能会导致被测设备或示波器受到冲击或损坏。
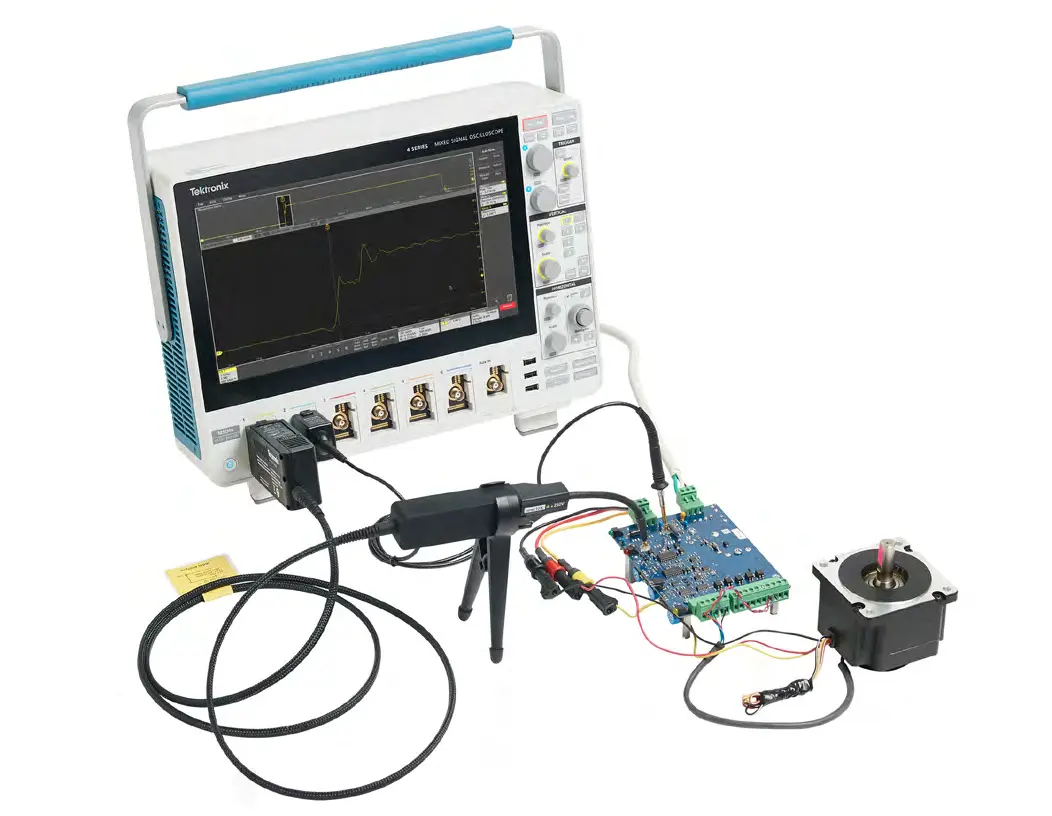
图10. IsoVu光学隔离电压探头提供极高的共模抑制比,能够承受最大2500V的差分电压,并且具有高达1GHz的带宽。
以下为一些建议用于电机驱动应用的探头:
|
型号 |
描述 |
|
高压 ( 差分 ) 探头 THDP0100 / 0200 |
THDP系列探头是一种良好的通用选择,适用于对各种功率电子逆变器和电机驱动子系统进行非接地参考的浮动测量。该系列探头能够测量高于地面数百伏的电压和高达6000V的差分电压,具体因型号而异。有100MHz和200Mhz两种型号可供选择。 |
|
光学隔离电压探头 IsoVu TIVP系列 |
IsoVu探头具有极高的共模抑制比,特别适用于在开关电路中精确测量高侧栅源电压 (VGS),并且常用于验证碳化硅 (SiC) 和氮化镓 (GaN) 应用。 有各种探头尖端可供选择。MMCX探头尖端能够提供高信号完整性,适用于电压不超过250V的测量。方针尖端有两种规格:0.100英寸 (2.54mm) 间距,适用于电压不超过600V的应用;以及0.200英寸 (5.08mm) 间距,适用于电压不超过2500V的应用。 |
|
电流探头 TCP0030A和TCP0150A |
AC/DC电流测量探头。TCP0030A具有大于120MHz的禁带宽度,并提供5ARMS和30 AARMS两种可选测量范围。对于更高的电流应用,则可使用TCP0150A,可测量最大150 AARMS的电流。 |
示波器探头设置
在进行任何功率测量之前,必须完成一些重要步骤。电流探头必须消磁,并且所有探头都应校正,以获得准确的测量结果。
在进行测量之前对电流探头执行消磁程序,消除探头磁芯中的任何剩磁,这一步非常重要。剩磁会导致测量误差。消磁程序通常是通过移除电流探头钳口的所有导体,然后按下消磁按钮启动的。泰克电流探头(例如TCP0030A)会在您使用前自动提示您执行消磁程序。
校正过程可以校正任意两个不同示波器通道(包括探头和探头电缆)之间的各种传输延迟。这一步很重要,因为相位关系对于变频驱动器系统上的许多测量至关重要。基本步骤是向通道提供同步信号,并调整每个通道的延迟,使各通道的信号对齐。泰克公司提供功率测量校正夹具 (P/N 067-1686-xx) 来帮助解决此问题。
连接电流探头时,务必注意探头上的箭头标记。如果电流探头连接在负载的线路侧,箭头应指向负载。如果电流探头连接在负载的返回侧,则箭头应指向远离负载的方向。







最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
