




 广告
广告





















































GB/T 44156-2024对后方交通穿行提示系统RCTA的要求

在停车场、狭窄道路或人流密集区域,车辆倒车过程中因为驾驶员视野盲区、操作失误或环境干扰等原因,经常导致碰撞事故的发生。
美国NHTSA统计:倒车事故占所有交通事故的约9%,其中30%涉及儿童,致死率较高。
为了减少倒车事故的发生,监管机构出台了一系列的法规要求,如R158、R175、FMVSS111等;主机厂纷纷开发智驾相关功能,如倒车影像、后方交通穿行提示RCTA、后方交通穿行制动RCTB、后向油门防误踩ACPE、后向自动紧急制动RAEB等。
更多倒车场景相关法规,详见前文:
一文讲清欧美日澳对倒车影像的法规要求
一文讲清油门防误踩功能ACPE及法规测试要求
香港法规对车辆倒车影像的要求
后方交通穿行提示RCTA(Rear Cross Traffic alert):在车辆倒车时,通过雷达或摄像头实时监测车辆后方两侧移动目标(如车辆、行人等),并在可能发生碰撞危险时向驾驶员发出警报。

根据IIHS 2022年的数据显示:RCTA系统可减少40%-60%的倒车碰撞风险。
2024年6月29日,中国国标GB/T 44156-2024《乘用车后方交通穿行提示系统性能要求及试验方法》正式发布,该标准规定了RCTA系统的技术要求、性能指标及测试方法。
1. 功能要求
RCTA系统按照最小识别目标是否包含行人而分为I型和II型:
I型:至少应识别汽车、摩托车、两轮车(无行人);
II型:至少应识别汽车、摩托车、两轮车和行人(有行人)。
RCTA至少应上电自检,检查相关电气部件和传感元件是否正常运行,在发生电子、电气故障时,对驾驶员进行清洗明确的故障提示。
RCTA系统应允许驾驶员主动开启/关闭,并有对应的视觉状态信号。
RCTA系统应具有良好的电磁兼容性,电磁兼容性能应符合GB 34660的要求。
2. 性能要求
RCTA 系统的碰撞提示形式应符合以下要求:
(a)至少为视觉、听觉、触觉中的一种;
(b)易被驾驶员感知且明显区别于车辆中其他系统的提示信息;(c)清晰地指示目标出现的方向。

当目标从左侧和/或右侧靠近试验车辆时,RCTA 系统应在预碰撞时间(TTC)不小于1.7s时发出碰撞提示,且碰撞提示形式符合上文的要求。
根据测试场景倒推,RCTA系统需覆盖车辆后方两侧特定区域(如横向距离及角度),典型范围为两侧各至少30米。
需在倒挡且车速低于一定阈值(如15 km/h)时激活。从检测到目标到发出警报的系统延迟应尽可能的小,一般在200~500ms左右。
对车辆目标的探测距离至少要≥30米,对两轮车的探测距离至少要≥20米,对行人的探测距离至少要≥10米。
系统需在雨、雪、雾、强光等复杂环境下保持正常功能。
系统应适应-40℃至+85℃的工作温度。
3. 测试方法 RCTA的功能验收测试应包括静态目标、动态目标、交叉路口模拟等场景,以覆盖不同速度、角度和遮挡情况。
GB/T 44156-2024只进行标准场景的测试,即车辆穿行、两轮车穿行和行人(成人&儿童)穿行测试。
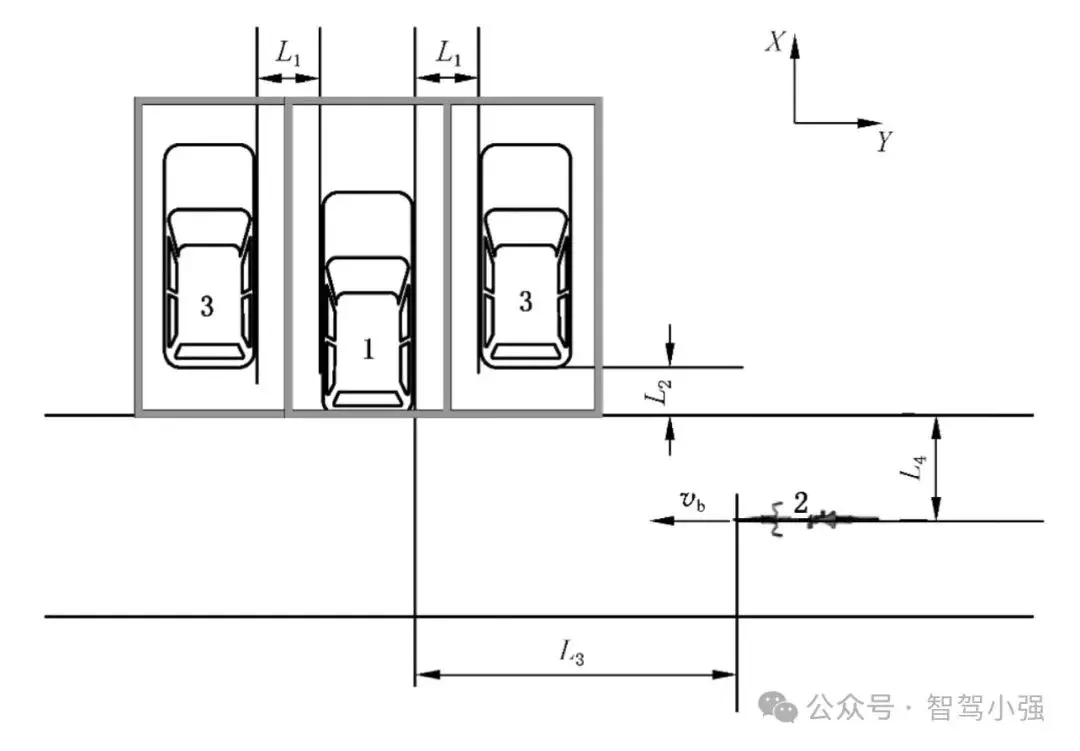
机动车穿行:
左右侧遮挡车辆(3)距离被测车辆(1)横向距离L1为70±5cm;(Y方向)
左右侧遮挡车辆(3)尾部距离被测车辆(1)尾部距离L2为50±5cm;(X方向)
目标车辆(2)的速度以及距离测试车辆的横纵向距离如下表所示:
项目参数目标车车速Va km/h10±120±140±140±1横向距离L3m10±0.220±0.230±0.230±0.2纵向距离L4m0.8±0.10.8±0.10.8±0.10.8±0.1
两轮车穿行:
左右侧遮挡车辆(3)距离被测车辆(1)横向距离L1为70±5cm;(Y方向)
左右侧遮挡车辆(3)尾部距离被测车辆(1)尾部距离L2为50±5cm;(X方向)
目标两轮车(2)的速度以及距离测试车辆的横纵向距离如下表所示:
项目参数目标两轮车车速Vb km/h10±120±1横向距离L3 m10±0.220±0.2纵向距离L4 m1±0.11±0.1
行人穿行:
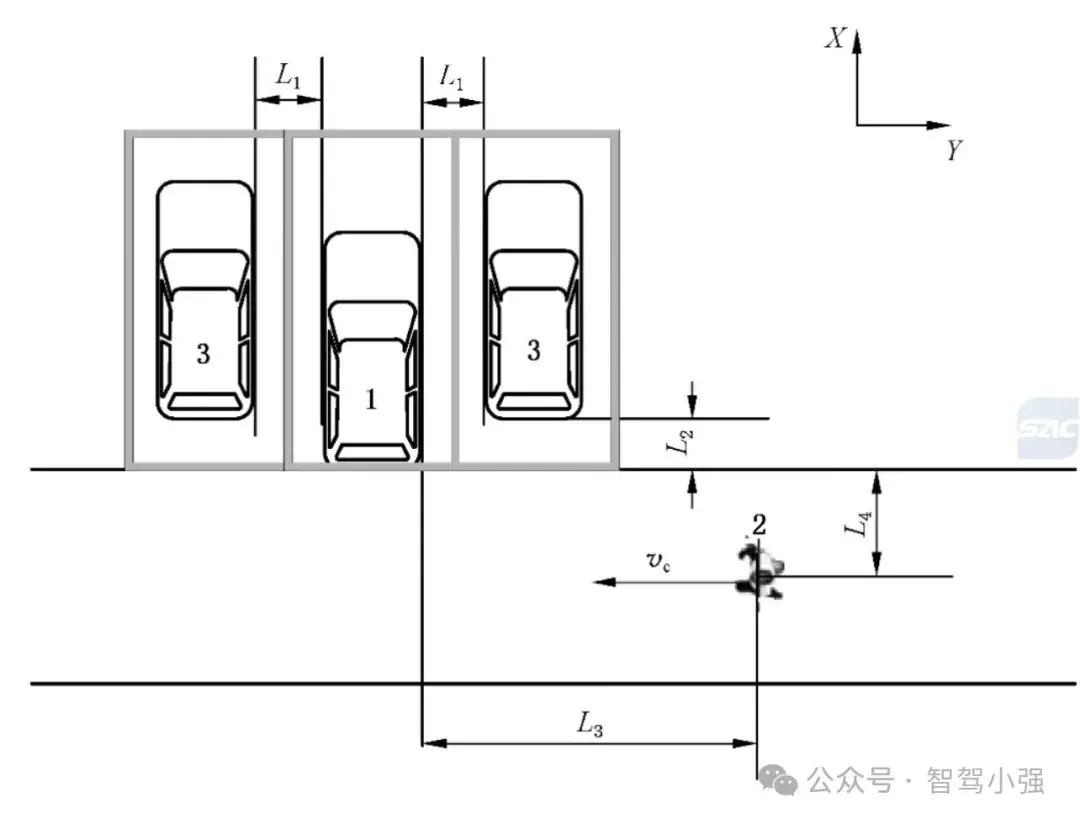
左右侧遮挡车辆(3)距离被测车辆(1)横向距离L1为70±5cm;(Y方向)
左右侧遮挡车辆(3)尾部距离被测车辆(1)尾部距离L2为50±5cm;(X方向)
目标两轮车(2)的速度以及距离测试车辆的横纵向距离如下表所示:
项目参数目标类别成人儿童行人目标速度Vc km/h5±0.55±0.5横向距离L3 m10±0.210±0.2纵向距离L4 m1±0.11±0.1







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
