




 广告
广告





















































GB/T 41484-2022对车载超声波雷达的要求

在“自动驾驶从小白到小强”系列文章中,一起学习过超声波雷达这一关键车载传感器:
1.什么是超声波雷达
2.超声波雷达的工作原理
3.超声波雷达的特性
4.超声波雷达系统的迭代
5.超声波雷达在汽车上的应用
6.超声波雷达装车常见工程问题
7.超声波雷达产业
超声波雷达更多信息,详见前文:
自动驾驶从小白到小强8~超声波雷达1
自动驾驶从小白到小强9~超声波雷达2
本文主要介绍一下GB/T 41484-2022《汽车用超声波传感器总成》这一国标对车载超声波雷达的性能要求、试验方法和检验规则。
1.外观和结构要求
2.输出信号要求
3.性能要求
4.环境评价要求
5.耐久性要求
6.试验方法
7.检验规则
1. 外观和结构要求
外观:
各部件外表面应光洁、平整,无凹痕、划伤、裂缝、交形、毛刺、霉斑等缺陷。
金属件表面应有均匀的防护层,无起泡、龟裂、脱落、锈蚀和机械损伤。 标志应准确、清晰且易于识别。
结构: 各零部件应装配完整且紧固可靠,无变形、松动和脱落现象。

2. 输出信号要求
超声波传感器总成应能输出探测距离、方位等信息的信号,或输出表征探测距离、方位等信息的听觉或视觉信号。 探测精度需满足本标准中规定的相关要求,详见性能要求章节。
3. 性能要求
频率:
工作频率由供需双方协商确定,公差为 ±1kHz。
余振:
余振时间应不大于 2ms。
探测范围:
分为I类和II类,具休要求如下:
I类:最近探测距离≤0.2m,最远探测距离≥2.5m,水平角度30°~60°,垂直角度30°~60°。
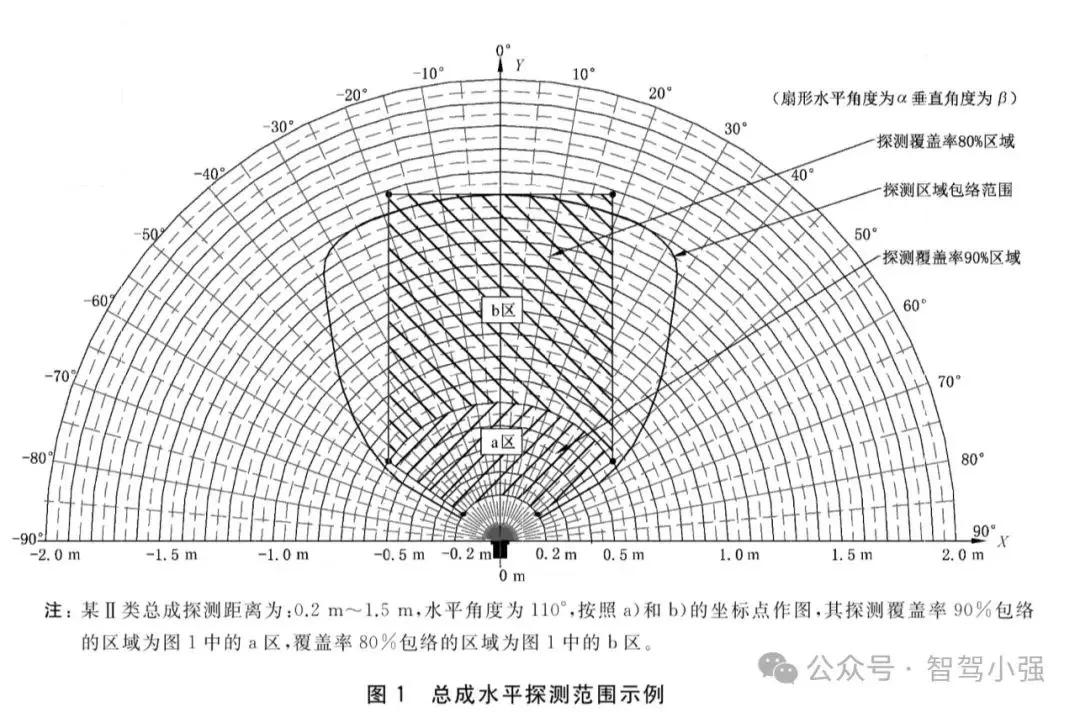
II类:最远探测距离≥1.5m,水平角度 90°~120°,垂直角度 45°~60°。
探测覆盖率:
水平和重直探测覆盖率需满足标准中规定的分区要求,例如:
在水平方向,0.2m~0.6m范围内覆盖率应不小于90%。 在垂直方向,0.2m~0.6m范围内覆盖率应不小于90%。
分辨力:
分辨力应不大于 10mm。
探测精度:
当探测距离在0.2m~1.0m时,精度不超过 ±30mm。
当探测距离在1.0m~最远探测距离时,精度不超过实际探测距离的±3%。
启动时间:
启动时间应不大于600ms。(倒车探测法规R158要求:从关门到挂倒挡时间不超过6s,从挂倒挡到发出报警信息,时间不超过600ms,两个时间惊人的一致







最新资讯
-
ISO 7637-4 脉冲A(脉冲正弦波骚扰)和脉冲
2025-04-18 09:27
-
ISO 7637-4沿高压电源线的电压瞬态发射测试
2025-04-18 09:26
-
ISO7637-3标准解读
2025-04-18 09:25
-
ISO7637-2标准解读
2025-04-18 09:23
-
标准发布丨ASAM OpenODD 1.0.0
2025-04-18 09:20
