




 广告
广告





















































GB/T 44461.1-2024对智能巡航功能ICA的要求

前文讲了R79对智能巡航功能(B1-ACSF)的要求,具体要求详见前文:
如何一周内搞定R79-B1-ACSF法规认证①
如何一周内搞定R79-B1-ACSF法规认证②
如何一周内搞定R79-B1-ACSF法规认证③
单车道控制系统:根据车辆周边行驶环境,对车辆持续进行横向和纵向运动控制,辅助驾驶员控制车辆仅在选定的单一车道内行驶的组合驾驶辅助系统。
GB/T 44461.1-2024《智能网联汽车 组合驾驶辅助系统技术要求及试验方法 第1部分:单车道行驶控制》适用于安装有单车道行驶控制系统的M类(载人)和N类(载货)车辆,在R79-B1-ACSF的基础上进行了继承和发扬,对单车道行驶控制系统提出了全面的技术要求和试验方法。
比如:明确了车辆居中行驶的性能要求、明确了跟车时距的要求、增加了目标车辆干扰试验等。具体要求如下:
1. 一般要求
功能要求:
系统应具备明确的激活条件,在激活状态下辅助驾驶员将车辆控制在选定车道内行驶。 系统应允许驾驶员调节巡航车速等设置,且不应影响自动紧急制动等应急辅助功能的激活。
(L2级功能不应抑制L1甚至L0级的安全功能[如AEB、ELKS等]触发,此处与R79-B1-ACSF要求一致)
自检功能:
系统在进入激活状态前应完成自检,检测相关电气部件和传感元件是否正常运行。检测到异常时,系统不应进入激活状态。
(此处与R79-B1-ACSF一致)
状态转换:
车辆每次上电/点火后,系统需通过车辆制造商规定的激活方式进入部分激活或激活状态。
系统应随时响应驾驶员的操作,从激活状态切换到非激活状态。
(上电默认关闭、驾驶员优先,此处与R79-B1-ACSF一致)
提示信号:
系统在部分激活和激活状态下应持续发出光学提示信号,并通过光学方式区分不同状态。 若系统发生故障,应发出故障指示信息。
(此处与R79-B1-ACSF一致)
驾驶员监测: 在激活状态下,系统应持续检测驾驶员是否在执行动态驾驶任务(如脱手检测)。
(此处与R79-B1-ACSF一致)
系统干预策略:
系统应响应驾驶员对车辆运动控制的主动干预。(驾驶员优先,此处与R79-B1-ACSF一致)
电磁兼容性: 系统应符合GB 34660的要求。
(此处与R79-B1-ACSF不一致,R79要求电磁兼容复合R10的要求)
8万字、25篇文章全面解读车辆电磁兼容EMC法规R10
功能安全:
系统应符合附录A中的功能安全要求,包括文档、功能概念和功能安全概念的验证和确认。
(此处与R79-B1-ACSF一致)
2. 性能要求
横向运动控制: 车辆与车道边线的横向间距应保持在(W/2±0.3)m。(此处与R79-B1-ACSF不一致,此处要求车辆居中,左右偏移不超过0.3m,R79无此要求)
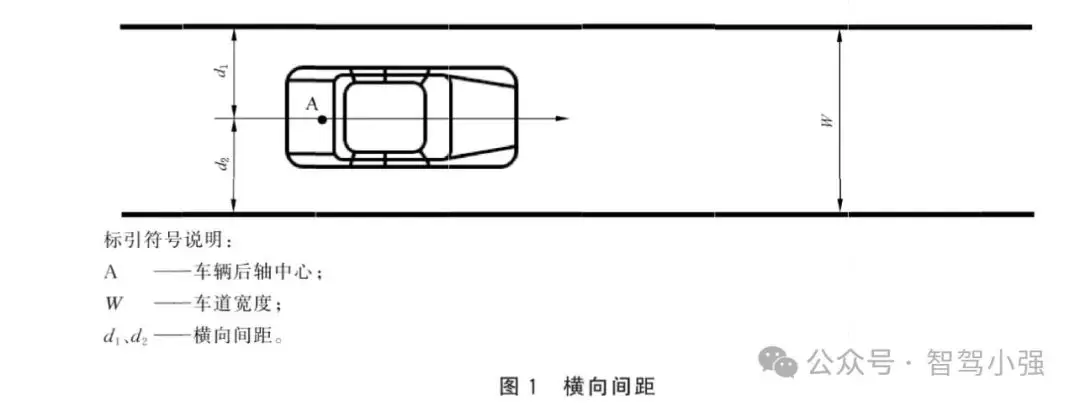
车辆任一车轮外边缘不应跨越车道边线内边缘。(此处与R79-B1-ACSF一致)
车辆横向加速度不应大于制造商声明的最大横向加速度,且横向加速度变化率平均值不大于5m/s³。(此处与R79-B1-ACSF一致)
在特定条件下,车辆横向加速度不应超过制造商声明的最大值的1.4倍。(此处与R79-B1-ACSF一致,申报值的1.4倍和3.3m/s²取小)
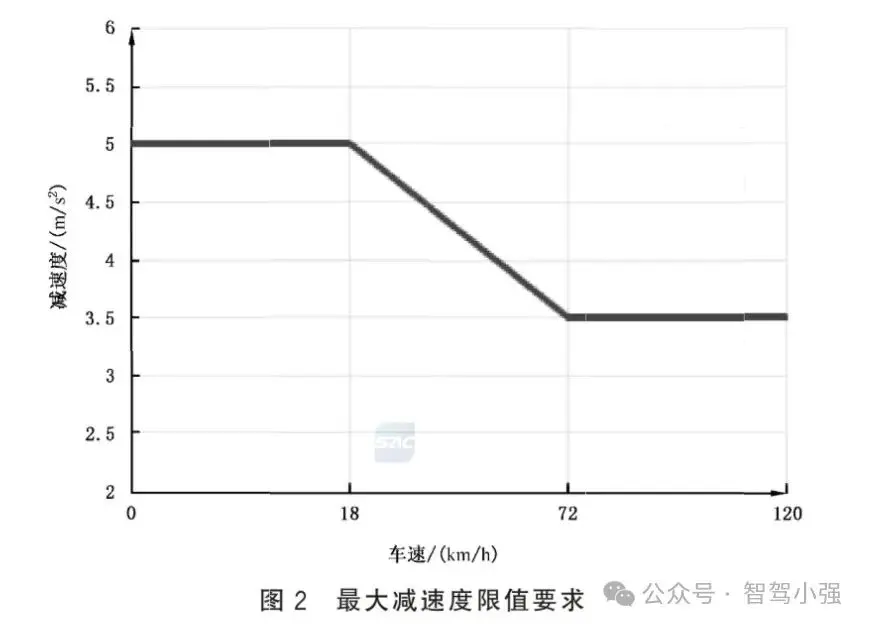
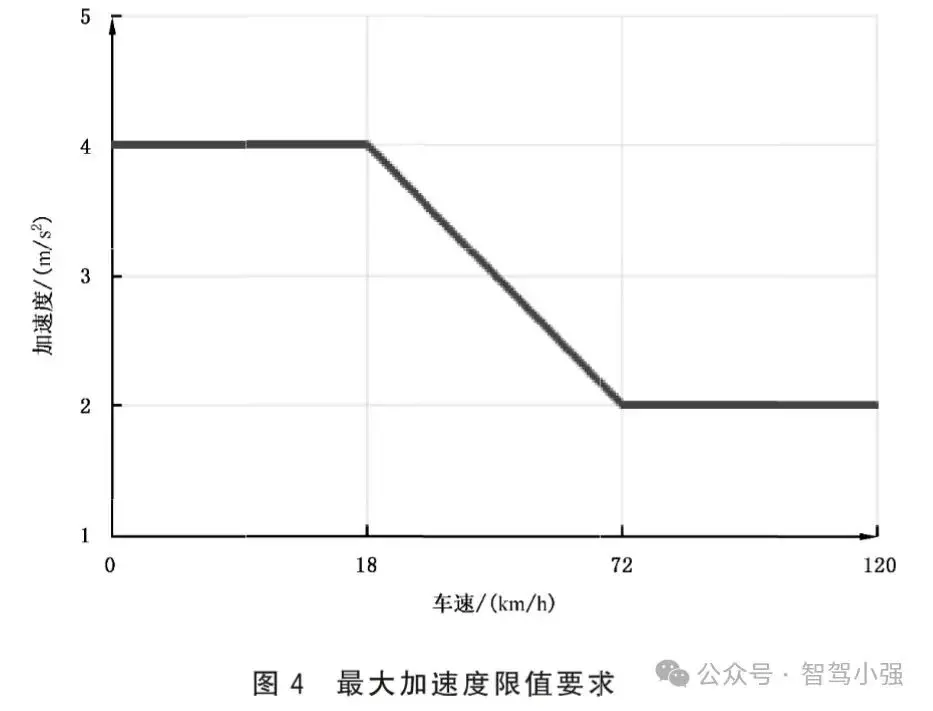
纵向运动控制(此处与R79-B1-ACSF不一致,R79未体现此要求):
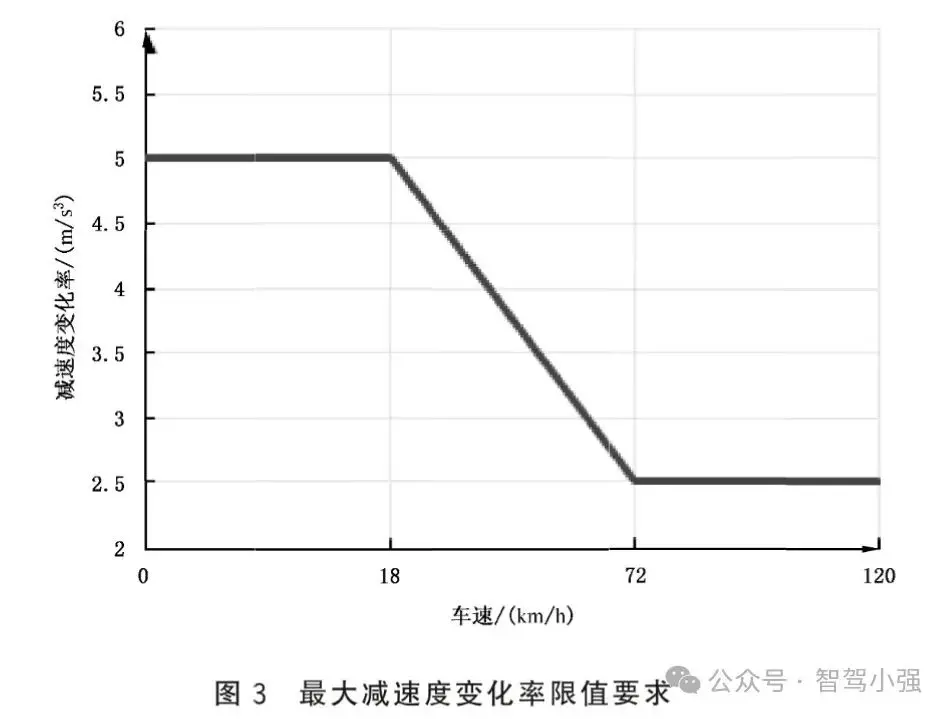
系统激活状态下,车辆的纵向减速度、减速度变化率和加速度应符合标准规定的限值。
跟车时距不应小于0.8秒。
在恶劣天气、道路倾斜或防止碰撞风险等特殊情况下,车辆的纵向减速度和加速度可短暂超过限值。
脱手提示及警告信号:
驾驶员脱手后不超过15秒,系统应发出脱手提示信号。
脱手后不超过30秒,系统应发出脱手警告信号(光学和声学信号)。 警告信号发出后不超过30秒,系统应自动进入非激活状态或其他制造商声明的状态。
(此处与R79-B1-ACSF一致)
驾驶员干预:
驾驶员应能通过不大于50 N的转向操纵力干预车辆行驶。(此处与R79-B1-ACSF一致)
3. 试验方法
试验条件: 试验道路应包含直道和弯道,车道宽度为3.5m~3.75m,路面干燥且无干扰。
试验环境应满足干燥、光照强度不低于500 lx、温度在-20°C~45°C之间等条件。
(此处与R79-B1-ACSF一致,车道线类型有差异,本标准为国标车道线,R79要求为R130附录三中的任一车道线类型,且须声明满足R130附录三中的所有车道线类型)
试验车辆: 载荷应符合车辆制造商规定,轮胎气压应为推荐的冷态充气压力。
(此处与R79-B1-ACSF一致)
目标车辆:
应为乘用车,轴距在2.0m~3.0m范围内。(此处与R79-B1-ACSF不一致,R79无此要求)
试验设备:
动态数据采样频率不低于100Hz,精度要求包括纵向速度、横向速度、加速度等。
(此处与R79-B1-ACSF一致)
试验项目:
无目标车辆试验:验证系统在直道上的稳定行驶能力。(R79无此要求) 目标车辆干扰试验:验证系统在目标车辆干扰下的反应能力。(R79无此要求)
最大横向加速度试验:验证系统在弯道中的横向加速度控制能力。(此处与R79-B1-ACSF一致)
脱手报警试验:验证系统在驾驶员脱手时的提示和警告功能。(此处与R79-B1-ACSF一致)
驾驶员干预试验:验证驾驶员干预时系统的响应能力。(此处与R79-B1-ACSF一致)

4. 功能安全要求(此处与R79-B1-ACSF一致)
文档: 系统应具备功能概念、安全策略、开发过程和方法的文档。
危害分析和风险评估:
应对系统功能性故障进行分析,并定义汽车安全完整性等级 (ASIL) 和安全目标。
功能安全概念:
系统应具备安全措施,如故障时维持部分功能、切换到备用系统、警告驾驶员等。
验证和确认: 系统的功能概念和功能安全概念应通过试验验证和确认。







最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
