




 广告
广告





















































四轮独立转向分布式驱动电动汽车单轮转向失效行驶稳定性控制


在线性二自由度汽车模型的基础上,建立附加后轮转角的单轨模型,以表征车辆在小侧向加速度且轮胎处于线性侧偏特性下的操作响应,将其作为横向参考模型,如图 3 所示。
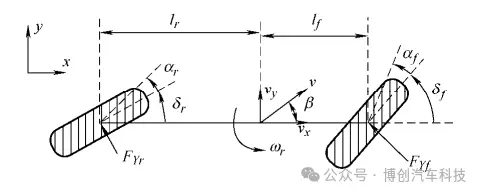
图 3 附加后轮转角的单轨模型
近似认为同车轴上的左右轮转角相同,将四轮转向转换为前后轮转向的单轨模型,单轨模型的动力学方程可以表示为
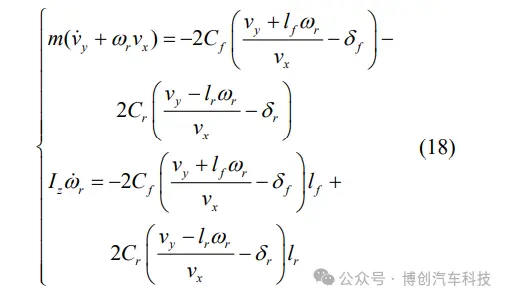
式中,Cf 、Cr 分别为前、后轮轮胎侧偏刚度,δf、δr 分别为单轨模型中的前、后轮转角。
前轮转角根据方向盘转角和车辆的转向传动比获得,即
式中, iSW 为转向传动比,本文中 iSW=16 。
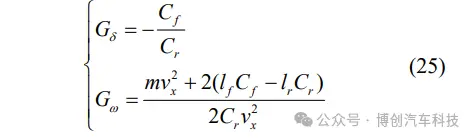
在车辆后轮主动转向过程中,利用车辆侧向运动的反馈来补偿后轮转角,后轮转角根据两部分信息确定:一部分正比于前轮转角;另一部分与车辆侧向加速度有关,侧向加速度通过纵向车速和横摆角速度确定,故后轮转角的表达式为

式中,Gδ为前后轮转角之比;Gω为车辆侧向运动状态的反馈增益。
当车辆稳态行驶时,横摆角速度ωr 为定值,此时
代入式(18),并结合式(20)可得车辆在稳态工况下的理想侧向速度和横摆角速度
式中, L=lf+lr 为前、后轴之间的距离。
通过式(17)和式(21)计算出来的理想纵向速度vxd、理想侧向速度 vyd和理想横摆角速度ωrd 即为附加后轮主动转向下,驾驶员所期望的行驶状态。
与传统前轮转向车辆相比,四轮独立转向分布式驱动电动汽车通过后轮转角的介入可对车辆的侧向力及横摆力矩产生附加增量,从而显著提高车辆的稳定性。针对附加后轮转角的单轨模型,本文分别考虑了两种稳态控制目标求解式(20)中的 Gδ 和Gω,使车辆具备稳态转向和两种转向方式。
将式(18)进行拉普拉斯变换,并将式(20)代入可得到车辆质心侧偏角以及横摆角速度对前轮转角的响应,即

可选取的转向方式一(稳态转向):使稳态转向时车辆的质心侧偏角β为零,即车辆行驶方向与车辆的航向保持一致,减小车辆的侧偏,保持车辆的稳定性,即常规稳态转向。令式(23)为零,即令式(23)分子中 s 项的系数以及常数项为零,可得
可选取的转向方式二(斜向行驶):使稳态下的横摆角速度ωr =0,此时车身不再绕自身转动,而是通过斜向行驶的方式转向过弯,在有限的空间里,迅速斜行到指定位置。令稳态下的式(24)为零,可得

将式(26)代入式(21)可知,此时 Gω的取值对侧向运动的稳态值没有影响,斜向行驶时的稳态质心侧偏角 β≈δf。令 Gω=0使前后轮转角保持一致,即 δf=δr,以减小斜行过程中轮胎磨损现象。即

针对极限工况下转向失效问题,本文通过轮胎侧偏角来检查车辆是否达到操纵极限,进而对两种转向方式进行切换,保证车辆的行驶稳定性。当一侧车轮转向失效后,同轴的车轮往往需要产生较大的侧向力来补偿失效轮所需的侧向力,容易达到轮胎侧偏极限。斜向行驶的转向方式,通过四轮转角一致来分担车身所需侧向力,有效避免某个车轮达到侧偏极限的现象。图 4 为垂直载荷 2~6 kN,在干沥青路面和湿沥青路面条件,即路面附着系数 分别为 0.85、0.55,纯侧偏工况下的轮胎侧偏特性曲线。由图 4 可知,当 ,
时,侧向力呈线性增加,轮胎侧向力可控;当

时,侧向力增加变得缓慢,轮胎侧向力控制效果减弱;而当 |αij|≥αsij时,侧向力饱和,轮胎侧向力不可控,故应尽可能使轮胎侧偏角处于 , |-αlij,αlij|的线性区域内。对比图 4a、4b 可知,湿沥青低附路面上所产生的最大轮胎侧向力相较于干沥青高附路面显著降低,而本文所研究的为中高速紧急避障工况,需要较大的轮胎侧向力;且当单轮转向失效后,其余正常车轮需要产生更大的轮胎侧向力进行补偿,在低附路面上无法产生所需侧向力,将使轮胎达到侧偏极限,本文所设计的控制方法将不再适用,需要另开发出新型控制方法,本文重点研究高附路面中高速紧急避障工况下单轮转向失效的行驶稳定性问题。



编辑推荐




最新资讯
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
-
博世发布突破性电解槽技术
2025-04-02 20:23
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
