




 广告
广告





















































基于驾驶员意图识别的双电机四驱电动汽车转矩分配的研究

国家工信部发布的《新能源汽车产业发展规划(2021-2035)》明确指出,“绿色”是新能源汽车的发展理念,“电动化”是新能源汽车的发展趋势。针对纯电动汽车,其动力性与操纵性长期是学界及工业界关注的重难点。迄今为止,学者已围绕电动汽车的动力性能评价体系与评估细则展开了大量研究,主要涉及电动汽车在完整加速踏板行程工况下表现出的动力特性,但对非完整加速踏板行程工况考虑较少。然而,由于非完整加速踏板行程工况占据汽车使用寿命的绝大部分,因此研究电动车动力性不能仅局限于理想的完整加速踏板行程工况,还应当考虑驾驶员在不同行驶工况下对电动车动力性能的需求。与完整加速踏板行程时不同,在非完整加速踏板行程时,电动车的动力性不仅由传动系参数匹配效果决定,还受到驾驶员意图、电机驱动策略、转矩分配方案等因素的影响。
纯电动汽车电机驱动控制策略划分为硬驱动控制特性、软驱动控制特性及介于二者之间的线性驱动控制特性等三种。线性驱动控制特性是指,驱动电机输出转矩比例系数与加速踏板行程的曲线呈线性变化,即随着加速踏板深度增加,电机输出转矩亦相应线性增加;硬驱动控制特性曲线与软驱动控制特性曲线分别是位于线性驱动控制特性曲线上方的上凸和下凸曲线,即:对于前者,极小的加速踏板行程变化即可引起较大的电机输出转矩增减,后者反之。线性驱动控制特性和软驱动控制特性均属于偏软的电机输出转矩变化特性,这类操纵特性易使驾驶员感到汽车动力性不足,尤其在需要较大驱动转矩的工况下动力不足的缺陷可能更为突出。因此,根驾驶员意图进行电动汽车操纵性能与动力性能的匹配设计是研究电机输出转矩控制特性的关键。
提升电动汽车工况适应性时,不仅须基于驾驶意图匹配电动车操纵性与动力性,还要设计先进的电机转矩分配策略,以提高电机分布式驱动性能和整车驱动效率。相比于单电机驱动,多电机驱动的电动汽车可通过控制电机间的转矩分配来提高整车驱动系统的运行效率、稳定性和平顺性。
然而现有双电机驱动电动汽车的转矩分配研究鲜有将驾驶员起步意图考虑在内,难以兼顾驾驶员起步时稳定性与动力性需求。本文首先对驾驶员起步意图进行识别,以计算不同起步意图下的驾驶员总需求转矩。其次,基于电机功效数据建立整车驱动系统效率数学模型,以前后驱动电机效率最大化为目标进行求解,进而制定了双电机四驱电动汽车的转矩分配策略。
01 目标车型参数及驱动结构布局
本文目标车型的主要参数如表1所示。双电机驱动系统将总的功率需求拆分到前后两个规格一致的电机上,整车驱动部分结构布局如图1所示。
|
表1目标车型的主要参数 |
|
|
参数 |
数值 |
|
整车整备质量/kg |
2210 |
|
轴距/mm |
2900 |
|
质心到前轴的距离/mm |
1472.3 |
|
质心到后轴的距离/mm |
1427.7 |
|
质心高度/mm |
484 |
|
减速器传动比 |
9.07 |
|
迎风面积/m2 |
1.87 |
|
空气阻力系数 |
0.35 |
|
前后驱动电机额定功率/kW |
80 |
|
前后驱动电机最大功率/kW |
160 |
|
前后电机额定转速/(r·min-1) |
5457 |
|
前后电机最高转速/(r·min-1) |
12000 |
|
轮胎直径/mm |
335 |
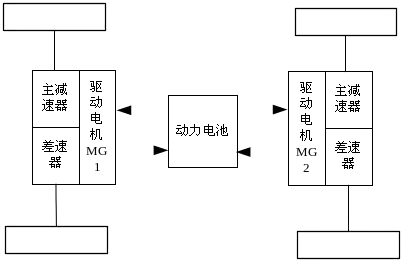
图1 双电机驱动部分结构布局
02分层控制架构及实现针对驾驶员不同起步意图下的前后轴转矩分配控制,设计了如图2的分层控制架构。首先,上层根据加速踏板行程和加速踏板行程变化率信息识别出驾驶员的起步意图,并计算出不同起步意图下的驾驶员需求转矩。下层基于效率最优原则控制前后轴电机转矩的分配方式,以实现上层给出的驾驶员需求转矩。

图2 分层控制架构
2.1 驾驶员意图识别
前后双电机电动汽车起步时转矩分配的研究,大多是在驾驶员稳态意图下开展的,难以满足驾驶员对动力性起步的需求。
为兼顾驾驶员稳态起步意图下的操控性和动态起步意图下的动力性,本文将驾驶员起步意图划分为两种,由加速踏板行程所代表的稳态起步意图和加速踏板行程变化率所代表的动态起步意图。稳态起步意图反应的是驾驶员起步的平稳性,以确保电动汽车具有较好的操控性,而动态起步意图反应则是驾驶员起步的迫切程度,用于保证电动汽车的动力性。
本文采用模糊控制算法识别驾驶员动态起步意图,取加速踏板行程 及加速踏板行程变化率
及加速踏板行程变化率 作为模糊控制器的输入参量,最终计算出驾驶员期望冲击度
作为模糊控制器的输入参量,最终计算出驾驶员期望冲击度 。其中
。其中 的论域为[0,1],表示加速踏板行程范围为0~100%,假设驾驶员由踏板初始位置踩到末端位置最少需要0.5
的论域为[0,1],表示加速踏板行程范围为0~100%,假设驾驶员由踏板初始位置踩到末端位置最少需要0.5 ,则
,则 的论域为[-2,2],依据国标取最大冲击度为10
的论域为[-2,2],依据国标取最大冲击度为10 ,则
,则 的论域为[0,10]。
的论域为[0,10]。
选取三个模糊语言来描述输入参量 ,以对其进行模糊化处理,选取的模糊语言为:小(S)、中(M)、大(B)。
,以对其进行模糊化处理,选取的模糊语言为:小(S)、中(M)、大(B)。
选取七个模糊语言来描述输入参量 ,分别为:负很大(NV),负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB),正很大(PV)。
,分别为:负很大(NV),负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB),正很大(PV)。
选取四个模糊语言来描述输出参量 分别为:零(ZO),小(S),中(M),大(B),很大(V)。
分别为:零(ZO),小(S),中(M),大(B),很大(V)。
图3为输入、输出参量的隶属度函数,输入、输出参量的模糊逻辑规则表如表2所示。经过模糊推理过程得到输出参量 的模糊描述。随后经过输出参量
的模糊描述。随后经过输出参量 反模糊化处理,计算得到驾驶员期望冲击度的推理值,如图4所示。
反模糊化处理,计算得到驾驶员期望冲击度的推理值,如图4所示。
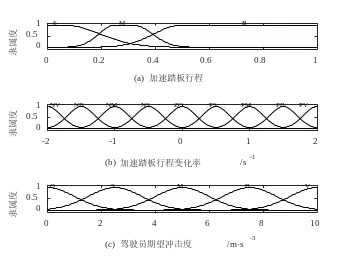
图3 输入、输出参量的隶属度函数
表2 输入、输出参量的模糊逻辑规则表
|
踏板行程变化率 |
踏板行程 |
||
|
S |
M |
B | |
|
NV |
V |
V |
V |
|
NB |
B |
B |
V |
|
NM |
M |
M |
B |
|
NS |
S |
M |
B |
|
ZO |
S |
M |
B |
|
PS |
S |
M |
B |
|
PM |
M |
M |
B |
|
PB |
B |
B |
V |
|
PV |
V |
V |
V |

图4 驾驶员期望冲击度
2.2 需求转矩计算
2.2.1 稳态需求转矩计算
在驾驶员起步意图识别的基础上计算了不同起步意图下的驾驶员需求转矩,驾驶员稳态意图识别算法结构如图5所示。
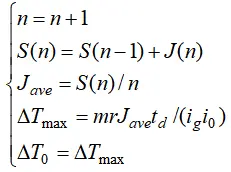
图5 驾驶员稳态转矩计算算法结构
纯电动汽车的动力性驱动控制策略主要可以分为三类,如图6所示。线1为硬踏板驱动控制策略,能够较好地满足驾驶员的加速感觉,但是其加速踏板过于灵敏,导致操控性较差。曲线3为软踏板驱动控制策略,其操控性较好,但加速感觉整体偏软,难以满足驾驶员的动力性需求。曲线2为线性踏板驱动控制策略,控制效果介于软、硬踏板控制策略效果之间,其操控性可满足驾驶员要求,但整体加速感觉偏软。本文制定如图7所示的驱动控制策略。

图6 三种纯电动汽车驱动控制策略
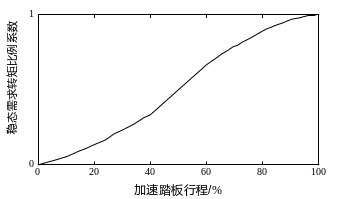
图7 稳态需求转矩比例系数识别模型
稳态转矩计算表达式为
 . (1)
. (1)
式中,为稳态需求转矩;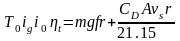 为稳态需求转矩比例系数,是电机当前转速下实际输出转矩与最大转矩的比值;
为稳态需求转矩比例系数,是电机当前转速下实际输出转矩与最大转矩的比值; 为电机转速;为电机外特性曲线所得的转矩,与电机转速有关。即得到不同加速踏板开度及不同电机转速下的稳态需求转矩。
为电机转速;为电机外特性曲线所得的转矩,与电机转速有关。即得到不同加速踏板开度及不同电机转速下的稳态需求转矩。
2.2.2 动态补偿转矩计算
基于驾驶员动态起步加速意图对稳态需求转矩进行动态补偿。
1.稳态车速计算
本文提出的稳态车速指平路上在稳态转矩的驱动下,车辆持续稳定行驶的速度,可由式子(2)计算:
. (2)
式中,为变速器传动比;为主减速器传动比;为传动系统效率; 为整车质量;为重力加速度;
为整车质量;为重力加速度; 为滚动阻力系数;
为滚动阻力系数; 为车轮半径;为风阻系数;
为车轮半径;为风阻系数; 为迎风面积;
为迎风面积; 为稳态车速。
为稳态车速。
2.动态补偿转矩策略
根据车辆行驶状态与加速踏板行程状态,可将车辆由起步到稳态运行整个过程分为四个阶段:①踏板稳定车辆稳态;②踏板变化车辆非稳态;③踏板稳定车辆非稳态;④踏板稳定车辆稳态。由此制定了如图8所示的动态转矩补偿策略算法逻辑。
图8 动态转矩补偿策略算法逻辑
(1)踏板稳定变化、车辆稳态
若驾驶员期望冲击度 满足:
满足:
. (3)
则令动态补偿转矩,不进行动态转矩补偿并初始化下一阶段计算所需的部分变量:
(4)
式中, 为动态转矩补偿算法的冲击度阈值;
为动态转矩补偿算法的冲击度阈值; 为调用动态转矩最大补偿值算法的次数;
为调用动态转矩最大补偿值算法的次数; 为最大期望冲击度累积初始值。
为最大期望冲击度累积初始值。
(2)踏板变化不稳定、车辆非稳态
若驾驶员期望冲击度 、实际车速
、实际车速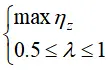 满足:
满足:
 且
且 . (5)
. (5)
则计算最大动态补偿转矩 :
:
(6)
式中, 为动态最大补偿转矩计算的速度阈值;
为动态最大补偿转矩计算的速度阈值; 、
、 、
、 为第次调用动态转矩最大补偿值算法后的驾驶员最大期望冲击度、最大期望冲击度累积值、平均期望冲击度;为冲击度持续时间,取值一般不大于驾驶员反应时间;由于踩踏板加速时间很短,故该阶段不进行转矩补偿。
为第次调用动态转矩最大补偿值算法后的驾驶员最大期望冲击度、最大期望冲击度累积值、平均期望冲击度;为冲击度持续时间,取值一般不大于驾驶员反应时间;由于踩踏板加速时间很短,故该阶段不进行转矩补偿。
(3)踏板变化稳定、车辆非稳态
该阶段又可分为动态转矩补偿与动态转矩归零两个阶段。若驾驶员期望冲击度 、实际车速满足:
、实际车速满足:
且 . (7)
. (7)
则执行最大动态转矩补偿:
(8)
式中,为动态补偿转矩归零的速度阈值。
若驾驶员期望冲击度、实际车速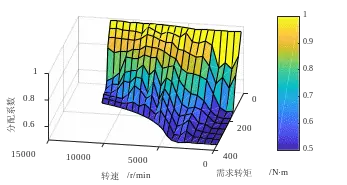 满足:
满足:
且. (9)
则执行动态补偿转矩归零:
(10)
(4)踏板稳定、车辆稳态
此时车辆已经完成加速,踏板稳定且车辆到达稳定的行驶状态,停止动态转矩补偿算法。
在车辆由起步到稳态运行过程中,动态补偿转矩计算公式为:
. (11)
为简化计算,假设同一行驶工况下,前后驱动系统的输出效率一致,同一驱动轴上左右车轮转矩相等,则最优转矩分配问题简化为求解前后轴转矩分配系数λ最优解问题:
 . (12)
. (12)
. (13)
式中,为前轴转矩分配系数, ;为前轴的需求转矩;
;为前轴的需求转矩; 为驾驶员的总需求转矩。
为驾驶员的总需求转矩。
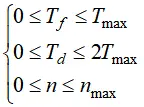
图9为所选电机的MAP图,电机的输出效率可看作是电机转速与电机转矩的函数。电机的驱动效率为:
(14)
即,驱动系统效率最优的数学模型为:
(15)
其约束条件为:
(16)
式中, 是当前转速下电机可以提供的最大转矩。为效率最优的数学模型的约束条件,表示电机能够提供的最大输出特性的限制。
是当前转速下电机可以提供的最大转矩。为效率最优的数学模型的约束条件,表示电机能够提供的最大输出特性的限制。
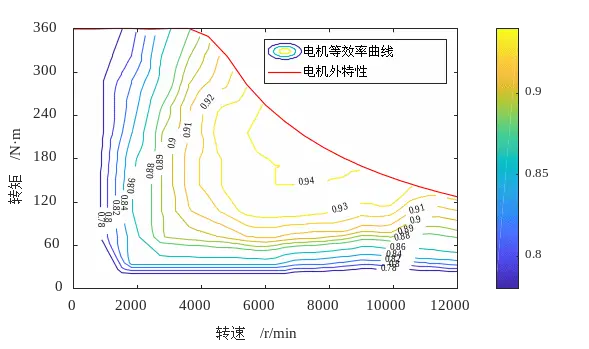
图9 电机MAP图与外特性曲线
依据该数学模型,并结合驱动电机的效率MAP,求解不同车速、不同驾驶员需求转矩下的前轴转矩分配系数和驱动效率最优值,进而得到基于效率最优的转矩分配策略,如图10所示,由图可知:
-
前轴转矩分配系数为0.5和1所占面积较大,驾驶员需求转矩较高时,前后电机均匀分配总需求转矩,
 。在小需求转矩时,动力由前轴电机独自提供,。
。在小需求转矩时,动力由前轴电机独自提供,。
-
前轴电机单独驱动与前后电机均分转矩的过渡较为平滑,且过渡区域狭窄,符合电机效率MAP图对应的电机功效特征。
图10 最优效率分配系数
04 结论本文采用模糊算法实现了驾驶员稳定性起步意图与动力性起步意图的识别,在不同的起步意图下计算得到了对应的驾驶员总需求转矩。根据电机的效率特性曲线建立了整车驱动系统效率数学模型,通过求解最优效率问题制定了前后轴转矩分配策略。







最新资讯
-
欧洲欲禁碳纤维
2025-04-16 15:47
-
模糊测试究竟在干什么
2025-04-16 15:23
-
越野车辆动力学 —— 越野车辆的平顺性
2025-04-16 14:50
-
Euro 7排放:欧盟委员会匆忙发布轻型车的实
2025-04-16 13:29
-
Applus+ IDIADA宣布采用全频谱碳纤维座舱用
2025-04-16 13:27
