




 广告
广告





















































智能驾驶车辆行车安全的两难困境和不可能三角场景

对上述两难困境场景进一步说明:
◆ 侧向躲避选项
为什么不讨论车辆2采取侧向躲避的选项?理由1:该选项需要侧向车道存在躲避空间作为前提,这一前提不一定随时都能满足;理由2:纵向驾驶存在两难困境,侧向驾驶同样也存在两难困境,基本逻辑和纵向驾驶的两难困境类似。如图4上图所示,车辆1紧急换道。车辆2进行决策时,避免与车辆1碰撞的轨迹(A轨迹)与车辆3碰撞,而避免与车辆3碰撞的轨迹(B轨迹)则与车辆1碰撞,因此,车辆2不存在安全的侧向决策。部分文献利用类似于Eq 1的公式结构描述侧向RSS距离。然而Eq 1中、关于纵向运动的假设(恒定减速度)和侧向运动特性是完全不同的。如图4下图,左侧为换道过程的速度曲线、右侧为换道过程的加速度曲线,可见侧向运动存在强烈的非线性特征。
◆ “触发条件”
两难困境并不意味着一定发生交通事故。类似于RSS概念包含了“触发条件”这一因素,两难困境的讨论也是在“触发条件”发生的前置假设下展开。“触发条件”这一概念非常宽泛,对于纵向驾驶而言一般为前车急停、对于侧向而言为紧急转向/换道,也可以替换为其他更加一般化的驾驶行为/风险因素等。
◆ Zone4和zone5的分界线为什么是直线?
答:计算出的分界线为直线形式,参考图5。
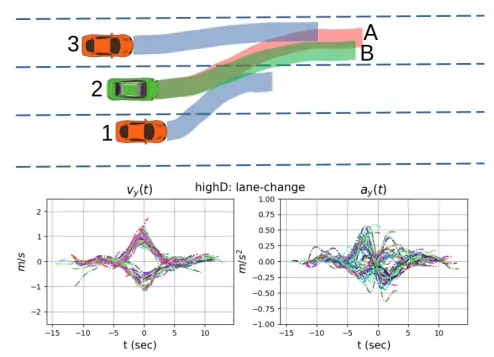
图4 上图:侧向安全决策的两难困境;
下图左:换道过程的速度曲线,t=0时刻表示穿越车道线;
下图右:换道过程中的加速度曲线,t=0时刻表示穿越车道线
2.2 两难困境临界距离 计算
计算
临界距离依赖各类参数和状态变量。给定小于安全距离 的d3→2,计算的步骤分为两步:
的d3→2,计算的步骤分为两步:
1)首先计算车辆2为了不和车辆3碰撞、而需要维持的减速度ā2'(该减速度ā2'小于原来预设的减速度ā2);
2)在ā2'前提下,计算车辆2需要维持的临界间距。
上述过程不在此赘述,参考Qi(2024)。ā2'的计算公式如下。首先计算中间变量ā2#以及 :
:
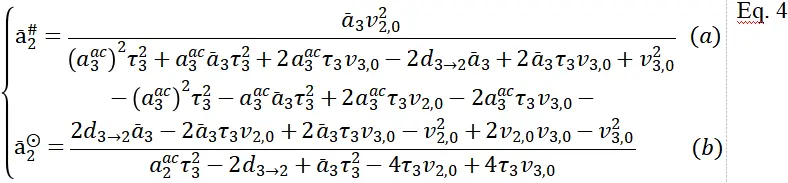
当

否则:

的计算结果如下。当
否则:

2.3 需要保持的额外距离
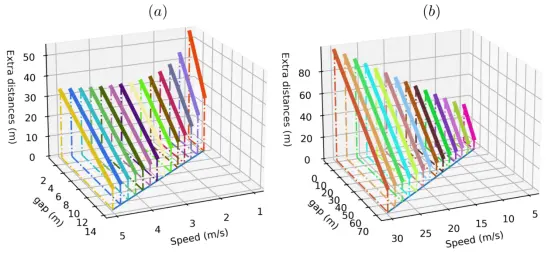
相对于RSS距离,考虑两难困境显然需要保持额外的安全间距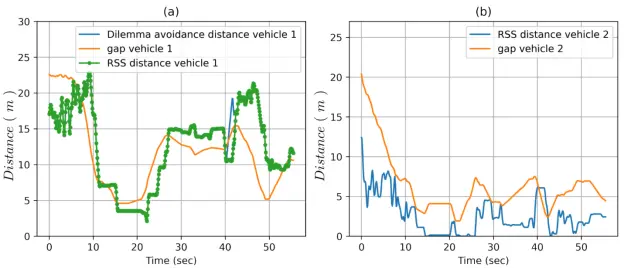 。对应不同的速度、不同的d3→2(也即下图中的gap坐标轴)该距离的示意图如图5所示。
。对应不同的速度、不同的d3→2(也即下图中的gap坐标轴)该距离的示意图如图5所示。
图5 需要保持的额外距离
03.
不可能三角场景Trilemma
3.1 场景描述
更近一步考虑4辆车组成的队列(图6a所示),车辆编号为 1 到 4(2和3为自动驾驶车辆、1和4为人工驾驶车辆)。在此场景中,假设车辆 2 和 3 遵循建议的安全间隔(RSS),并且车辆 4 违反了 RSS。初始速度分别为v1,0、v2,0、v3,0、v4,0。如果车辆 1 突然减速,车辆 1 和车辆 2 之间、或车辆 2 和 3 之间能够避免碰撞,而车辆 4 和车辆 3 之间将发生碰撞。
车辆3为了避免与车辆4碰撞,可以采用较为温和的减速度ā3',该减速度要求车辆2也调整自身的减速度、采用较为温和的减速度ā2'',这一温和的减速度进一步要求车辆2维持一个大于的距离。因此,当车辆2维持的安全间距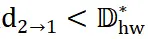 ,则发生安全决策的不可能三角场景(图6c):系统最多只能保证三个安全(车辆1和2之间的安全、车辆2和3之间的安全、车辆3和4之间的安全)中的两个。
,则发生安全决策的不可能三角场景(图6c):系统最多只能保证三个安全(车辆1和2之间的安全、车辆2和3之间的安全、车辆3和4之间的安全)中的两个。
图6 不可能三角



 广告
广告
编辑推荐




最新资讯
-
精确试验与高效仿真的有机结合,虚拟传感器
2025-03-19 08:59
-
中国汽研支撑的我国首个汽车再生制动功能缺
2025-03-19 08:58
-
中国汽研主要参与编写的《V2X State of Pla
2025-03-19 08:58
-
分布式驱动车辆轨迹跟踪与稳定性多智能体协
2025-03-19 08:50
-
SAE J3016智能驾驶系统定义和分级
2025-03-19 08:48
