




 广告
广告





















































智能驾驶车辆行车安全的两难困境和不可能三角场景

 计算
计算
临界距离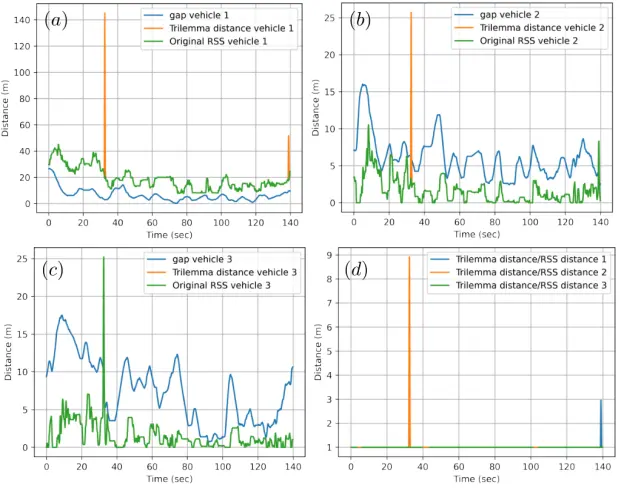 取决于一系列参数(τ2,τ3,τ4,v1,0,v2,0,v3,0,v4.0,d4→3,d3→2)。给定小于
取决于一系列参数(τ2,τ3,τ4,v1,0,v2,0,v3,0,v4.0,d4→3,d3→2)。给定小于 的距离d4→3,计算临界距离
的距离d4→3,计算临界距离 分为如下步骤:首先计算ā3'、其次计算ā2''、最后计算。具体过程不再赘述,参考Qi(2024)。可以推断,d4→3越小、越大。临界两难困境的平均车头时距
分为如下步骤:首先计算ā3'、其次计算ā2''、最后计算。具体过程不再赘述,参考Qi(2024)。可以推断,d4→3越小、越大。临界两难困境的平均车头时距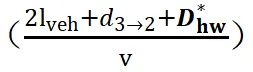 和临界不可能三角的平均车头时距
和临界不可能三角的平均车头时距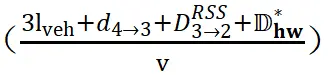 如图7所示。
如图7所示。
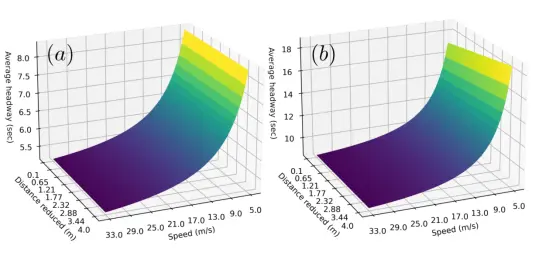
图7 临界不可能三角场景的车头时距
04.
更加复杂的场景:不可能N角(polyLemma)和嵌套不可能N角
4.1 不可能N角polyLemma
上述场景涉及到3辆车和4辆车的纵向决策。可以推广至侧向决策以及任意N辆车(如5辆车的Tetralemma、6辆车的Pentalemma等等)。具体逻辑类似,当人类驾驶车辆(HDV)发生行为错误,智能驾驶车辆无论如何也不可能避免事故时,即为不可能N角场景。不可能N角场景用polyLemma表达。
4.2 嵌套不可能N角
再考虑决策困境的嵌套。基本场景如图8所示。车辆1-2-3-4组成了不可能三角(车辆4没有遵守安全规则、维持了较短的安全距离);车辆4-5-6-7同样维持了不可能三角(车辆7没有遵守安全规则)。
当我们将车辆1~7视作整体时,由于车辆7没有遵守安全规则,车辆6为了避免与车辆7碰撞、需要维持额外的间距。同理,车辆5考虑车辆6的安全需求、需要维持额外的安全距离,上述要求一直递推至车辆2。当车辆2没有维持足够的间距、来满足车辆3~7的安全需求时,即为嵌套不可能六角场景Hexalemma。
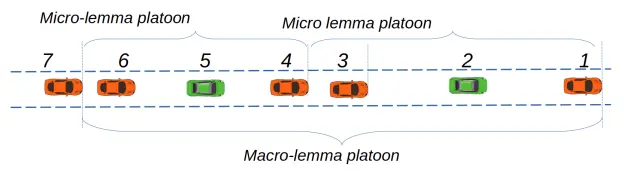
图8 嵌套不可能N角
05.
现实世界中polylemma场景及发生概率
5.1 Dilemma案例
本小节的数据集来自 NGSIM。选择一个满足两难困境条件的、由三辆车组成的队列(车辆0——车辆1——车辆2,车辆0为头车),时间跨度约为 60 秒。三辆车的速度和纵向坐标如图9所示。图9左图为速度曲线,右图为纵向距离。
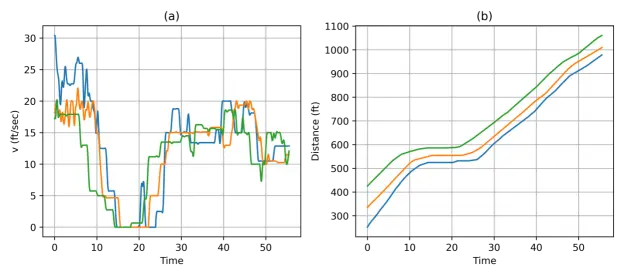
图9 车辆速度和间距
图10显示了 RSS 距离和两难困境距离。图10-a 为队中的第 2 辆车(车辆标号1)而 图10-b 为最后一辆车(车辆标号2)。图10b中,车辆2维持的间距在大部分时间都超过了 RSS 距离。在时间区间[40.3 s, 42.3 s],维持的距离小于RSS。这种差异是由于中间车辆的轻微减速(见图9-a相应时间窗口内的速度曲线)、从而减小了间隙(见图9-b相应时间窗口内的车辆间距)。
由于车辆2违反 RSS 规则、导致车辆1出现困境场景(见图10-a 中 40.3 秒到 42.3 秒,临界两难困境距离超过了相应的车辆间距)。在图10-a中,车辆 1 的 RSS 违规持续时间比例为 59.3%,车辆 2 的 RSS 违规持续时间为 3.95%。车辆2 的 RSS 违规导致了车辆1的两难困境。该队列两难困境场景发生事件比例为 3.95%。
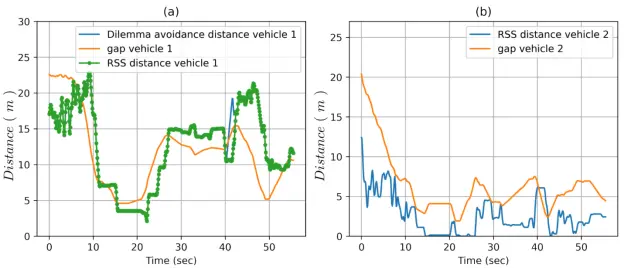
图10 两难困境距离和RSS



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
