




 广告
广告





















































智能驾驶车辆行车安全的两难困境和不可能三角场景

本节选择ngsim中4辆车组成的队列(车辆编号从队列头部到队列尾部分布额为0-1-2-3)、描述现实世界中的不可能三角场景。图11为四辆车的速度和坐标。该队列遇到大约 80 秒到 100 秒的拥堵(stop and go)事件。图12显示了该队列的 RSS 距离、间隙和不可能三角距离。图12a~c分别为车辆1~3的临界RSS距离、不可能三角临界距离以及实际的车辆间距。对于车辆 3(图12-c),大多数情况下表现出安全的情况,RSS 距离小于间隙。然而在短暂的 0.7 秒间隔(从 32.2 秒到 32.9 秒),RSS 距离显著增加。这种情况源于车辆 3 的加速(图11a)。由于车辆3违反了安全规则,车辆2需要维持较大的安全距离来满足车辆3的安全需求(图12-b中的trilemma distance)。这又要求车辆1保持更大的安全间距(图12-a中的trilemma distance)。
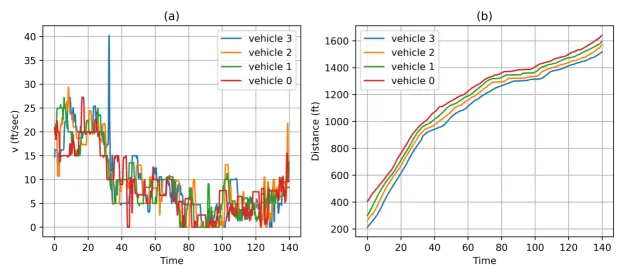
图11 4辆车组成的队列
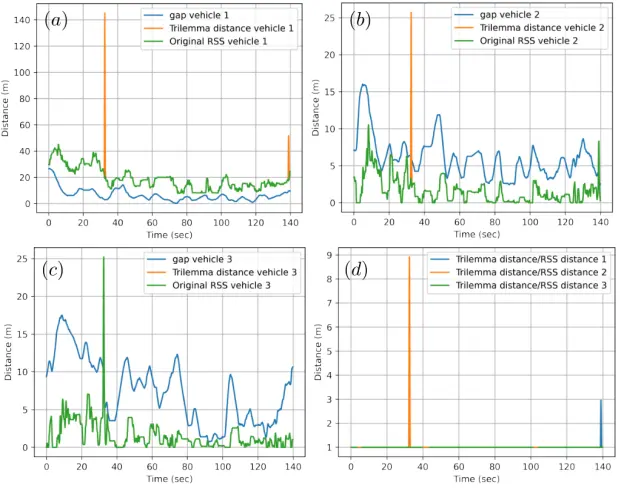
图12 不可能三角
5.3 highD和zen数据集中polyLemma发生概率
基于highd和zen数据集,对polylemma发生概率进行分析。对于数据集中任意一个N车辆的队列(N=3,4,5,…),假定其时间窗口为T(不同的队列数据、T不同)。首先计算发生polylemma的持续时间比例(如50%表示T时间窗口内、有一半的时间发生安全决策困境)。η∈[0,1]。
对于highd数据集而言,统计所有队列的,其分布如图13所示(每条曲线的积分=1)。X=2表示dilemma(也即3辆车的队列),X=3表示trilemma(也即4辆车的队列),依此类推。从图中可见,绝大部分队列的困境时间比例接近0。也有一部分队列整个事件窗口内都发生决策困境(η=1)。Zen数据集中的分布如图14所示。可以看出,zen数据集和highd数据集呈现不同的分布特性。由此可见,不同国家的安全场景各异、需要具体分析。
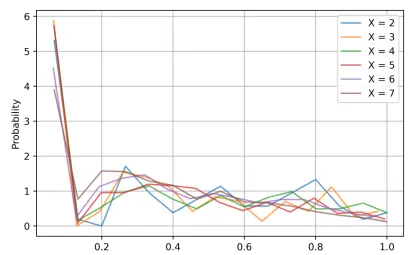
图13 highD数据集中、队列的polylemma持续时间比例的概率分布
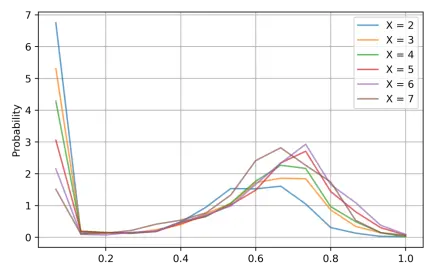
图14 zen数据集中、队列的polylemma持续时间比例的概率分布
06.
错误容忍型驾驶策略
polyLemma发生的根本原因是人类驾驶员的行为错误、也即没有维持足够的安全间距。从自动驾驶车辆角度而言,可以调整自己的行为、对人类驾驶员进行容错。Qi(2024)提出了错误容忍型驾驶策略(Human error tolerant ,HET)。HET 策略包括三个步骤:
polyLemma发生的根本原因是人类驾驶员的行为错误、也即没有维持足够的安全间距。从自动驾驶车辆角度而言,可以调整自己的行为、对人类驾驶员进行容错。Qi(2024)提出了错误容忍型驾驶策略(Human error tolerant ,HET)。HET 策略包括三个步骤:
- 根据 RSS 规则、识别违规车辆,计算每辆下游车辆的必要减速度和避免安全困境所需要的临界间隙。
- 确定 polyLemma 中的哪辆自动驾驶汽车实施 HET 策略。
- 最后,执行 HET 策略(维持额外的安全距离、并以较为温和的减速度为触发事件做减速准备)。
07.
结论
背景车辆的行为是影响智能驾驶车辆安全的重要因素。当背景车辆没有遵守安全规则,本车存在安全风险。本文描述了其他车辆行为错误所导致的本车安全决策困境,并以纵向驾驶为例、具体讨论了两难困境、不可能三角场景,随后将其推广至polyLemma。根据实际数据(NGSIM、highD和zen数据集)计算结果可以发现,polyLemma发生概率并不能完全忽视。为了对人类驾驶员的错误进行缓冲,提出了错误容忍型驾驶策略。该策略通过调整智能驾驶车辆的安全间距、减速度,对冲背景车辆的错误行为。
安全间距模型仍然需要进一步研究。包括:1)核心参数如反应时间、最大加减速的估计;2)安全间距模型的不确定性估计;3)安全间距如何与现有控制器(如PID、end2end、MPC等)进行融合。
图15 错误容忍型驾驶策略
朱震海| 作者
周奕 | 审核
参考引用文章
· Forbes , T., Human factor considerations in traffic flow theory, Highway Res. Record 15 (1963) 60–66. Connected Vehicle 》
· Forbes, T., M. Simpson, Driver and vehicle response in freeway deceleration waves, Transport. Sci. 2 (1) (1968) 77–104.
· Gipps , P., A behavioral car following model for computer simulation, Transport. Res. B 15 (1981) 105–111.
· Pipes, L.A., An operational analysis of traffic dynamics, J. Appl. Phys. 24 (1953) 271–281.
· Qi, HongSheng. "Dilemma of Responsibility-Sensitive Safety in Longitudinal Mixed Autonomous Vehicles Flow: A Human-Driver-Error-Tolerant Driving Strategy." IEEE Open Journal of Intelligent Transportation Systems (2024).
· Shalev-Shwartz, Shai, Shaked Shammah, and Amnon Shashua. 2017. “On a Formal Model of Safe and Scalable Self-Driving Cars.” CoRR abs/1708.06374.
http://arxiv.org/abs/1708.06374.
· Sidorenko, G., Fedorov, A., Thunberg, J., & Vinel, A. (2022). Towards a Complete Safety framework for Longitudinal Driving. IEEE Transactions on Intelligent Vehicles, 7(4), 809–814.
https://doi.org/10.1109/TIV.2022.3209910



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
