




 广告
广告





















































智能驾驶车辆行车安全的两难困境和不可能三角场景

智能驾驶车辆行车安全的两难困境和不可能三角场景
环境交通流行为是影响智能车辆行车安全的重要因素。不良的环境交通流行为给本车带来风险。特定参数组合(驾驶员反应时间、最大加减速等)、特定状态组合(位置、速度等)下,智能车辆面临特殊安全决策困境:一旦触发事件发生(如前车急停),系统状态不可避免导向交通碰撞、而与本车具体决策无关。本车决策只能决定和环境交通流中的哪辆车碰撞、以何种状态碰撞。本文以纵向驾驶为例,论述了满足上述特征的两难困境(Dilemma)和不可能三角(Trilemma)场景、并推广至不可能N角(polylemma),随后计算了highD和zen数据集中polyLemma持续时间比例的概率分布。为避免陷入决策困境,提出了人类驾驶员容错(HET, human error tolerant)驾驶策略,该驾驶策略通过调整安全间距、调整自身行为参数(减速度),对其他车辆的错误行为进行缓冲。
关键词:驾驶行为;安全间距;责任敏感模型;汽车安全;交通安全;
➡本文主要内容(约7300字,建议收藏阅读)
01.车辆的安全间距
为保证安全,本车必须与其他车辆保持一定的间距(下文称“安全间距”)。虽然安全间距模型不是本文讨论主题,但仍然需要一个具体的安全间距模型作为讨论起点。安全间距有多种理论模型和表达形式(如Pipe ,1953; Forbes , 1963及1968; Gipps ,1981)。不失一般性,本文以RSS模型(责任敏感模型或称responsibility sensitive safety,Shalev-Shwartz、Shammah等,2017)为基础讨论Dilemma/ Trilemma场景。
RSS的基本设定如下,假定车辆1为前车、车辆2为后车,车辆的位置表示为X1和X2,初始速度分别为v1,0和V2,0。车辆2的反应时间为τ2。现考虑车辆2为了保证安全需要与前车保持最小间距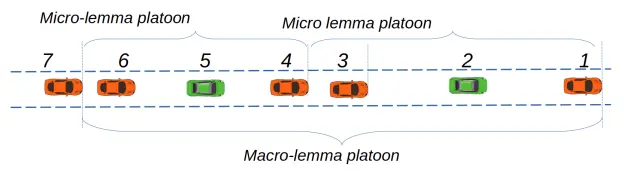 。为推导
。为推导 ,做如下假设:初始时刻,车辆1急减速、减速度为ā2;在反应时间内,车辆2采用加速度
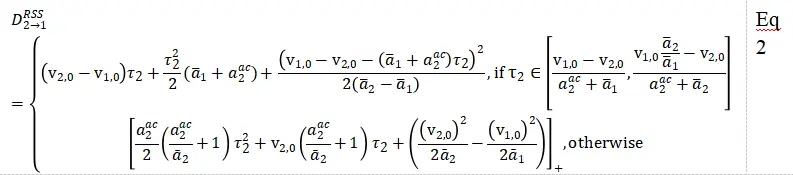
,做如下假设:初始时刻,车辆1急减速、减速度为ā2;在反应时间内,车辆2采用加速度 ,之后采用减速度ā2直至停车。在上述假设下,最小安全间距
,之后采用减速度ā2直至停车。在上述假设下,最小安全间距 计算公式(详细推导过程见Sidorenko et al., 2022)如下所示。
计算公式(详细推导过程见Sidorenko et al., 2022)如下所示。
如果ā1≥ā2:

如果ā1<ā2:
 的物理含义简单明了:只要车辆2 保持最小间距
的物理含义简单明了:只要车辆2 保持最小间距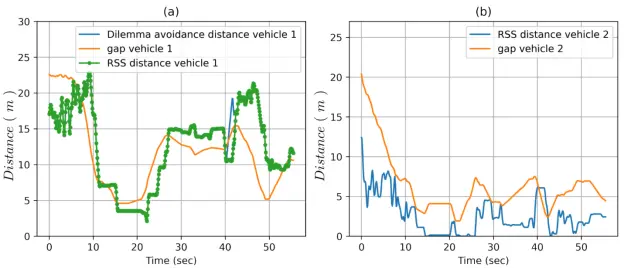 ,两车之间不会发生碰撞。由于假设条件中,车辆2在反应时间内采用加速度
,两车之间不会发生碰撞。由于假设条件中,车辆2在反应时间内采用加速度 ,因此距离
,因此距离 是保守安全距离公式。后续诸多文献对其进行了改进,此处不再赘述。
是保守安全距离公式。后续诸多文献对其进行了改进,此处不再赘述。
显然,现实世界中违反RSS规则是常见的现象。图1为实际数据集中、不同速度下违反RSS规则的比例。图1-b为速度—密度(交通流密度,也即单车道平均每公里内的车辆数)关系图,红色分界线为临界RSS,其右侧为违反RSS数据点、左侧为遵守RSS的数据点。
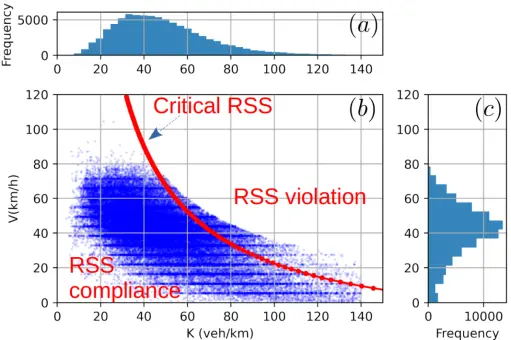
图 1 违反RSS规则的频数分布(Qi,2024)
02.
两难困境Dilemma
2.1 场景描述
基本场景
基本RSS安全间距公式仅考虑了前后两辆车。现在考虑由三辆车组成的队列(如图2 a中间车道),车辆分别表示为 1(人工驾驶车辆)、2(自动驾驶车辆)和 3(人工驾驶车辆)。初始速度分别为v1,0、v2,0、v3,0,车辆2和3的反应时间分别为τ2、τ3。遵循RSS模型推导过程、假设t=0时刻,车辆1使用ā1急减速(图2 b中的stage1)。系统的时间线如图2 b:车辆2在时刻τ2(车辆2对应时间线的stage1)之后进行减速、其减速度为ā2、车辆3在时刻τ2+τ3(车辆3的时间线对应的stage1和stage2)之后减速,减速度为ā3。
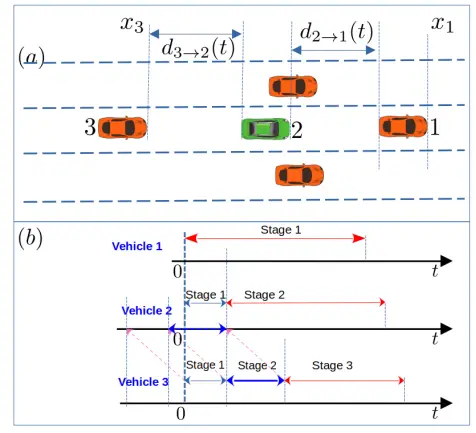
图 2 困境描述的减速事件时间线
如果车辆2和车辆3都遵循RSS原则(也即保持足够的安全距离,分别表示为 、
、 ),上述过程是安全的。如果车辆2保持了安全间距、而车辆 3 违反了 RSS 规则(保持了小于
),上述过程是安全的。如果车辆2保持了安全间距、而车辆 3 违反了 RSS 规则(保持了小于 的安全间距),则当车辆1突然制动时,车辆3和2之间仍可能发生碰撞。为避免碰撞,车辆2可以采用较小的减速度、而不是原来的ā2。然而,较小的减速度需要车辆2保持一个更大的安全间距
的安全间距),则当车辆1突然制动时,车辆3和2之间仍可能发生碰撞。为避免碰撞,车辆2可以采用较小的减速度、而不是原来的ā2。然而,较小的减速度需要车辆2保持一个更大的安全间距 (该距离
(该距离 )。当实际保持的距离d1→2小于时、车辆2就面临着安全决策的两难困境:一旦触发事件发生(此处的触发事件为车辆1以减速度ā1急停),车辆2或者与车辆1碰撞、或者与车辆3碰撞。
)。当实际保持的距离d1→2小于时、车辆2就面临着安全决策的两难困境:一旦触发事件发生(此处的触发事件为车辆1以减速度ā1急停),车辆2或者与车辆1碰撞、或者与车辆3碰撞。
从车辆2角度而言,系统状态按照距离d1→2分成三类,如式Eq 3:当 ,车辆2违反了安全规则;当
,车辆2违反了安全规则;当 ,车辆2面临两难困境;当,车辆2既没有违反安全规则、也没有两难决策。
,车辆2面临两难困境;当,车辆2既没有违反安全规则、也没有两难决策。

可以推断,当d3→2越小,也就越大。以d2→1和d3→2为横纵坐标,系统相图如图3所示。整个系统状态分为5个区域:
- Zone 1,车辆2违反RSS规则、车辆3没有违反违规;
- Zone 2,车辆2和3都没有违反规则;
- Zone 3,车辆3和2都违反了安全规则;
- Zone 4,车辆2没有违反规则、车辆3违反了规则,并且由于车辆3违反规则、导致车辆2面临两难困境;
- Zone 5,车辆2没有两难决策、车辆3违反了规则。
图3中,zone4和zone5的界面(critical line)即为临界距离。
图3 Dilemma specification



编辑推荐




最新资讯
-
欧洲欲禁碳纤维
2025-04-16 15:47
-
模糊测试究竟在干什么
2025-04-16 15:23
-
越野车辆动力学 —— 越野车辆的平顺性
2025-04-16 14:50
-
Euro 7排放:欧盟委员会匆忙发布轻型车的实
2025-04-16 13:29
-
Applus+ IDIADA宣布采用全频谱碳纤维座舱用
2025-04-16 13:27
