




 广告
广告





















































SAE J3016智能驾驶系统定义和分级

L1级和L2级驾驶自动化系统功能的总称
注意:1级(驾驶辅助)和2级(部分自动化)功能只能够执行部分的DDT,因此需要驾驶员来执行DDT的其余部分,并在使用时监督该功能的性能。因此,这些功能在使用时,支持但不代替驾驶员执行DDT。
3.9 [配备ADS的车辆]的无人驾驶操作
装备有ADS的车辆在道路上的运行,该车辆无人驾驶,或者车上的用户不是驾驶员或车内准备接管的用户。
注1:ADS-DV总是在无人驾驶的情况下调度(受3.33.3中注3的限制)。
注2:配备了ADS的双模式车辆可以在无人驾驶的情况下被派遣。
注3:车上的乘客既不是驾驶员,也不是准备接管的用户。
例子:一辆L4级ADS-DV在无人驾驶的情况下被派去提供运输服务。
3.10 动态驾驶任务(DDT)
在公路交通中车辆运行所需的所有实时操纵的功能,不包括策略功能,如行程安排和目的地及起始地的选择,并包括但不限于以下子任务:
1. 通过转向进行车辆横向运动控制(运行);
2. 通过加速和减速的纵向车辆运动控制(运行);
3. 通过物体和事件检测、识别、分类和反应准备来监测驾驶环境(运行和策略性);
4. 物体和事件响应的执行(运行和策略性);
5. 操纵计划(策略)。
6. 通过照明、鸣笛、信号、手势等方式加强显眼性。(策略性)。
注1:一些自动驾驶系统(或配备该系统的车辆)可能有办法在前进和接管之间改变车辆的纵向运动控制。
注2:为了简化并提供一个有用的速记术语,子任务(3)和(4)被统称为目标物和事件检测和响应(OEDR)(见3.19)。
注3:在本文件中,提到了 "完成DDT"。这意味着完全执行DDT的所有子任务,无论这个角色是由(人类)驾驶员,还是由驾驶自动化系统,或者由两者的组合来完成。
注4: 图2显示的是驾驶任务的示意图。关于驾驶的运行、策略性和重要的功能之间的差异的更多信息,请参见8.11。
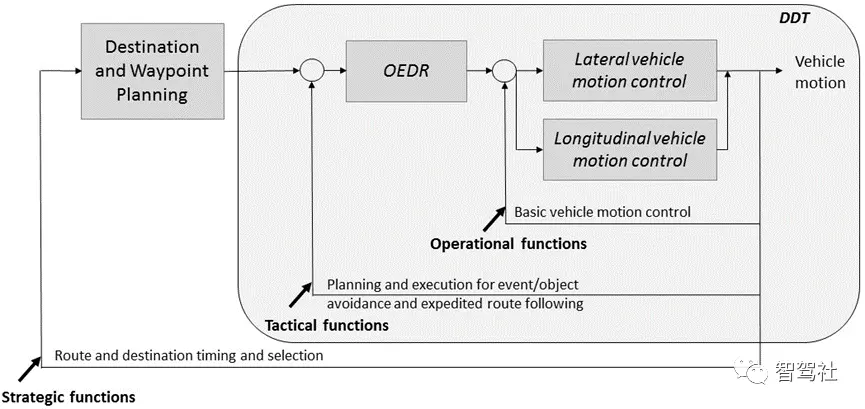
图2-驾驶任务的示意图(不是控制图),显示DDT部分
就DDT性能而言,L1级驾驶自动化包括最内环的一部分自动化(即,横向车辆运动控制功能或纵向车辆运动控制功能和与车辆运动控制的给相关的有限OEDR);L2级驾驶自动化包括最内侧环的自动化(横向和纵向车辆运动控制和与车辆运动控制相关的有限OEDR),L3至L5级驾驶自动化包括两个内环的自动化(横向和纵向车辆运动控制和完整OEDR)。请注意,DDT性能不包括驾驶的策略层方面(例如,决定是否,何时,在何处行驶)。
3.11 故障缓解策略
一种车辆功能(不是ADS功能),旨在使装有ADS的车辆在以下两种情况下自动进入受控停车状态。(1)在ADS发出干预请求后,L3级ADS功能的接管就是系统有问题请求驾驶员干预时驾驶员接管,或(2)发生系统故障或外部事件,以至于使ADS失去能力,不能再执行车辆运动控制以执行接管并达到最小风险状态。(见8.6)。
注意:一些配备了L2级驾驶员支持功能的车辆可能被设计成如果驾驶员未能表明他/她在功能激活期间继续监督功能的性能,则将车辆制动到完全停止。虽然这与上面定义的故障缓解策略的功能相似,但 "故障缓解策略 "这一术语是为不需要驾驶员监督的ADS功能保留的。
3.12 [动态驾驶任务(DDT)]接管
在发生与动态驾驶任务性能相关的系统故障后,或在退出运行设计域(ODD)时,或在相同的情况下,ADS为实现最小风险条件而作出的反应,以执行动态驾驶任务或实现最小风险条件。
注1:DDT和接管DDT是不同的功能,执行一个的能力不一定意味着执行另一个的能力。因此,一个能够在其ODD内执行整个DDT的L3级ADS可能没有能力在所有需要接管DDT的情况下执行接管DDT,因此在必要时将向接管DDT就绪的用户发出干预请求(见图3至6)。
注2:一些L3级功能可能被设计成在某些情况下自动执行接管并达到最小的风险条件,例如,当无障碍物的相邻路肩存在时,但在其他情况下,例如,没有这样的路肩时,就不能自动执行接管。因此,L3级的分配并不限制ADS自动实现最小风险条件,但它不能保证在其ODD内所有情况下自动实现最小风险条件。此外,在某些,但不是所有需要的情况下,自动实现最小风险条件并不构成L4级功能。
注3:在L3级ADS系统中,一个ADS能够在向接管就绪用户提供干预请求后继续执行DDT至少几秒钟。接管DDT准备好的用户应该恢复手动车辆操作,或者如果他/她认为有必要的话,达到一个最小的风险状态。
注4: 在L4级和5级ADS系统中,ADS必须有能力执行接管DDT并达到最小风险状态。装备了ADS的L4级和L5级车辆,在设计上也能满足驾驶员的操作(无论是车内还是远程),在情况允许的情况下,如果用户选择这样做,可以允许他/她执行接管DDT(见图7和8)。然而,一个L4级或L5级的ADS不需要设计成允许用户执行接管DDT,事实上,可以设计成不允许,以减少碰撞风险(见8.9)。
注5: 当L4级或L5级ADS执行接管DDT时,它可能被设计限制在速度和/或横向和/或纵向车辆运动控制的范围内(即,它可能进入所谓的 "跛行模式")。
注6: 在执行接管DDT时,ADS可能暂时在其ODD之外运行(见3.21注1)。
例子1: 一个L1级自适应巡航控制(ACC)功能经历了一个系统故障,导致该功能停止执行其预定功能。人类驾驶员通过恢复执行完整的DDT来执行接管DDT。
例子2:一个在高速公路交通拥堵时执行整个DDT的3级ADS功能在遇到车祸现场时无法做到,因此准备向用户发出接管DDT干预请求。他/她的反应是接管整个DDT的性能,以便在车祸现场周围进行手动操作(见图4)。(注意在这个例子中,不需要或没有达到最小风险的条件)。
例3:一个在有地理围栏的城市中心执行整个DDT的L4级ADS专用车辆(ADS-DV)经历了一个DDT性能相关的系统故障。作为回应,ADS-DV通过打开危险闪光灯,将车辆开到路肩并停放,然后自动召唤紧急援助,来执行DDT后退(见图7)。(请注意,在这个例子中,ADS-DV自动实现了最小的风险条件)。
下面的图3到图8说明了DDT在不同的自动化驾驶水平上的接管情况。
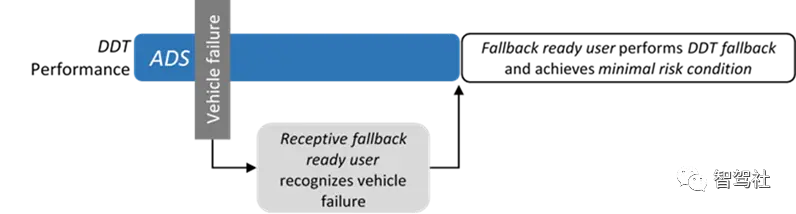
图 3
L3级用例序列样本,显示ADS参与和发生车辆系统故障,阻止继续DDT性能。用户执行接管并达到最小的风险条件。
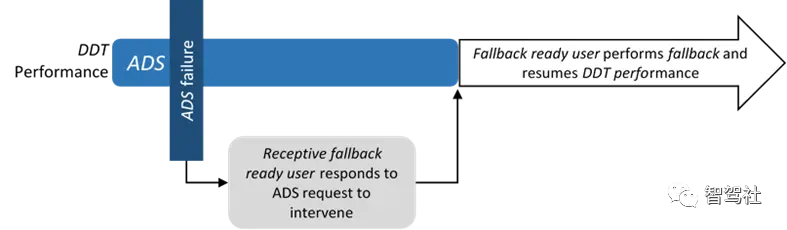
图 4
L3级用例序列样本,显示ADS参与和发生ADS系统故障,但不妨碍继续DDT性能。用户执行接管并恢复DDT性能。
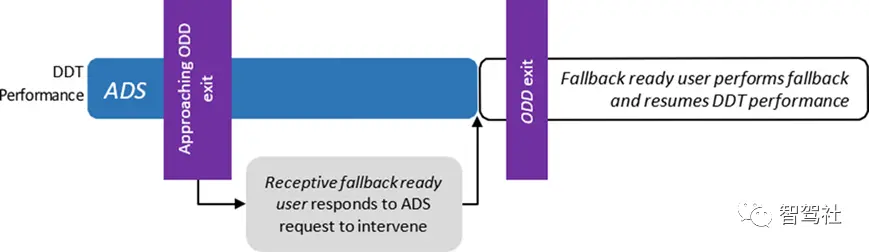
图 5
L3级的样例用例序列显示ADS被占用以及退出ODD的情况,但这并不妨碍继续的DDT性能。用户执行接管,恢复DDT性能。
图6
L4级的样例用例序列显示了ADS的参与和车辆系统故障的发生,从而阻止了DDT的继续运行。ADS执行接管并达到最小的风险条件。
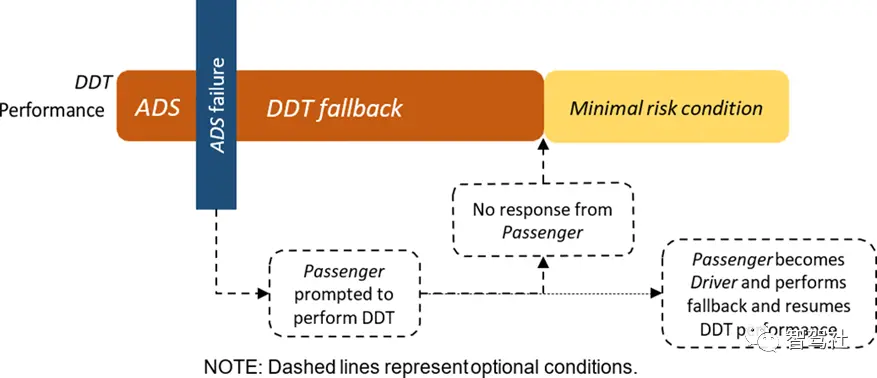
图7



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
