




 广告
广告





















































分布式驱动车辆轨迹跟踪与稳定性多智能体协同控制研究

如图5为兼顾车辆稳定性的轨迹跟踪控制器的整体框架图。首先,确定稳定性判据,进而判断车辆是否存在失稳风险,若不存在失稳风险则不做任何干预,而若存在失稳风险,则通过另一套兼顾车辆稳定性及轨迹跟踪的控制器来求解得到新的控制输入,其包含前轮转角及附加横摆力矩。该控制器采用分层框架,包含上层解算期望附加横摆力矩控制器及下层关于四个轮毂电机的转矩分配控制器,具体内容将在下述介绍。

图5 控制器总体框架图
2.1 稳定性判据使用稳定性判据来确认正常的驱动模式或横摆稳定性控制模式。常用的三种稳定性判断的方法如下:
(1)通过横摆角速度及质心侧偏角实际值与名义值间的偏差来判断车辆的稳定性;
(2)使用横摆角速度-质心侧偏角稳定性包络区来判断车辆的稳定性;
(3)采用侧偏角-侧偏角速度相平面稳定性判断方法。
通过分析及对比,本文所设计的车辆稳定性判断原理如图6所示,其采用侧偏角-侧偏角速度相平面法进行判断,同时考虑横摆角速度对稳定性的影响。

图6 稳定性判断原理图
相平面法可以表示为以下公式:
 (20)
(20)
其中, 、
、 分别为车辆的质心侧偏角及质心侧偏角速度。
分别为车辆的质心侧偏角及质心侧偏角速度。![]() 和
和![]() 是边界参数,
是边界参数, 和
和 分别为车辆横摆角速度
分别为车辆横摆角速度 的误差及车辆横摆角速度的期望值。
的误差及车辆横摆角速度的期望值。
表1边界参数B1和B2
|
路面附着系数 |

|

|
|
|
0.357 |
5.573 |
|
|
0.357 |
4.654 |
|
|
0.303 |
4.228 |
|
|
0.297 |
3.345 |
|
|
0.284 |
2.577 |

车辆稳定性判断过程如图6所示,首先,根据选择B1和B2,在通过动力学模型得到期望横摆角速度(名义值),再结合车载传感器及状态观测器得到实际的横摆角速度及质心侧偏角等值,进而计算出期望横摆角速度与实际横摆角速度之间的偏差,最后根据上述参量来判断车辆是否存在失稳风险。
2.2 名义值设计在稳定性判据中,需要应用到横摆角速度的名义值。根据单轨模型式(4),可求得在角阶跃输入下,车辆稳态行驶时的横摆角速度,如表达式(6)。但是,式(6)忽略了轮胎力受到路面附着系数μ的制约,且车辆的侧向加速度、横摆角速度等同样受到其限制。首先,轮胎侧向力必须满足摩擦圆限制,即可得对侧向加速度约束如下:
 (21)
(21)
通常有、,代入式(21)可得附着极限下,横摆角速度极限值为:
(22)
由式(6)及(22),最后可得横摆角速度的名义值为:
 (23)
(23)
其中,符号函数的作用是使得横摆角速度名义值符号与前轮转角符号相对应,即正的前轮转角(左打)产生正的横摆角速度。
2.3 观测器设计由于稳定性判据中需要使用到车辆当前实际的横摆角速度、质心侧偏角及质心侧偏角速度,而其中可由传感器直接测得仅有横摆角速度,而另外两个所需的量则无法直接获得。因此,将通过其他的方法来间接得到上述两个参量。
通过分析,车辆二自由度动力学模型的状态空间表达中,状态变量包含了横摆角速度及质心侧偏角,因此,考虑通过状态重构的方法来间接得到质心侧偏角,即通过设计观测器的方法。进一步分析可知,两个状态变量中的横摆角速度可以直接由传感器测得,且通过可观性矩阵判据验证,模型为可观的,因此,最终确定通过设计观测器来间接得到质心侧偏角,进而通过横摆角速度及质心侧偏角结合质心侧偏角速度的表达式计算得到质心侧偏角速度。下面将介绍整个观测器设计过程。
(1)建立系统状态方程
选择以横摆角速度及质心侧偏角作为状态变量的车辆二自由度动力学模型来建立系统状态方程,具体如下:
 (24)
(24)
其中, ,
, ,
, 。
。
在观测器设计中需要离散化的状态方程,因此,下面将利用零阶保持器对式(24)近似离散化:
 (25)
(25)
其中, 为采样周期。
为采样周期。
(2)建立测量方程
测量方程如下:
 (26)
(26)
其中, 。
。
(3)观测器
给定观测初始时刻系统状态的初值,再根据下述5个式子对系统状态进行重构,最终得到质心侧偏角的观测值。
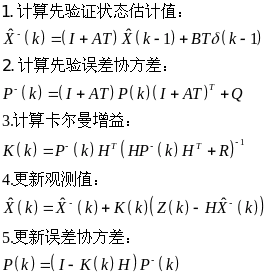 (27)
(27)
在完成对质心侧偏角的观测后,最后通过下式间接计算得到质心侧偏角速度。
 (28)
(28)



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
