




 广告
广告





















































分布式驱动车辆轨迹跟踪与稳定性多智能体协同控制研究

 (42)
(42)
结合式(40)及式(42),可得离散得黎卡提方程及其终端约束如下:
 (43)
(43)
其中, 。
。
结合式(34)(忽略了外部扰动)、(41)、(42)及(43),可得开环纳什平衡策略,具体如下所示:
 (44)
(44)
其中,

其中, 。
。
在上一小节中完成了上层控制器的设计,最终通过所设计的上层控制器可以求得在兼顾车辆稳定性及路径跟踪表现下所需要施加的附加横摆力矩的数值,而如何具体在车辆上通过差动获得所需的附加横摆力矩则需要通过下层控制器来实现。
(1)扭矩分配策略
基于优化的思想来设计扭矩分配策略,首先对目标函数进行设计。考虑到所期望目标为尽可能的保证车辆在紧急避障的路径跟踪过程中,车辆能够尽可能的保持稳定性,因此,设计能够表征车辆稳定性的性能指标,目标函数形式如下:
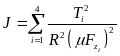 (45)
(45)
其中,R为车轮半径,下标1到4分别对应左前轮、右前轮、左后轮、右后轮。该目标函数的设计使用了路面附着利用率裕度来表征车辆的稳定性,即通常认为,路面附着利用率裕度越大,则车辆距离稳定性边界越远,因此,此处的目标函数设计为四个轮的路面附着利用率裕度之和,优化目标则是寻找满足约束条件且能最小化该代价函数的一组扭矩值。
下面将考虑该优化问题的约束条件。首先,通过电机输入的驱动扭矩或者制动系统产生的制动扭矩所得到的纵向力之和必须满足车辆纵向行驶方程约束,即能够提供纵向控制
所需要的动力,其约束形式如下所示:
 (46)
(46)
其中, 为车辆总的纵向力,可通过纵向行驶方程式得到。
为车辆总的纵向力,可通过纵向行驶方程式得到。
此外,由该组扭矩所得到附加横摆力矩也必须能够提供上层控制器所需的附加横摆力矩,即能实现对期望附加横摆力矩的跟踪,其约束形式如下所示:
 (47)
(47)
考虑执行器的物理约束,即最优解扭矩必须不超过电机所能输出的最大扭矩,也不能小于制动系统所能产生的最大制动扭矩,其约束形式如下所示:
(48)
最后,其还受到路面附着条件的制约,其约束形式如下所示:
 (49)
(49)
综上,最终整理得到优化问题形式如下:
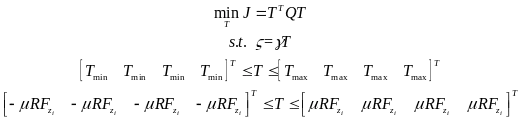 (50)
(50)
其中, ,
, ,
, ,
, 。
。



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
