




 广告
广告





















































分布式驱动车辆轨迹跟踪与稳定性多智能体协同控制研究

(2)滑移率跟踪控制器设计
虽然通过基于优化的扭矩分配策略可以求得各个车轮的输入扭矩值,但是,就其本质而言,附加横摆力矩是通过各个车轮所受到的轮胎纵向力对质心的力矩之和得到。因此,最终将通过轮胎动力学及轮胎模型将通过基于优化的扭矩分配策略得到的各个车轮输入扭矩值映射到各个车轮期望的滑移率,再通过滑移率跟踪控制器完成对其的跟踪。下面将介绍本文中滑移率跟踪控制器的设计过程。

图8 轮胎受力分析示意图
如图8所示,其为车轮旋转运动受力分析图,此处忽略了空气阻力及滚动阻力,假设车轮为驱动加速状态,驱动电机或者制动系统对车轮施加的扭矩记作 ,其中当所施加扭矩为驱动扭矩时,该值为正,若为制动扭矩,则该值为负。结合图及牛顿第二定律,可得车轮旋转自由度的动力学模型如下:
,其中当所施加扭矩为驱动扭矩时,该值为正,若为制动扭矩,则该值为负。结合图及牛顿第二定律,可得车轮旋转自由度的动力学模型如下:
 (51)
(51)
其中, 为车轮绕车轮坐标系
为车轮绕车轮坐标系 轴的转动惯量,单位,
轴的转动惯量,单位, 为轮胎受到沿轮胎坐标系
为轮胎受到沿轮胎坐标系 轴的纵向力,单位
轴的纵向力,单位 ,
, 为车轮转速,单位
为车轮转速,单位 。
。
滑移率表达式如下:
 (52)
(52)
对上式对时间进行求导得可得:
 (53)
(53)
由式(51)可得:
 (54)
(54)
滑膜面设置如下:
 (55)
(55)
对式(55)求导可得:
 (56)
(56)
将式(54)代入(56)可得:
 (57)
(57)
设置趋近率函数为:
 (58)
(58)
其中,,当其值设定的越大,滑移率将越快的趋近期望值,但是可能会导致控制量进行频繁的切换。由式(57)及(58)可得:
(59)
本节将基于联合仿真平台,验证控制策略的可靠性和有效性。通过仿真,对比研究了两种不同的控制策略:第一种是未考虑车辆稳定性的横纵向耦合轨迹跟踪控制,第二种则是采用本文所设计的协同控制。其中,路面附着系数设定为0.5,初速度设定为65km/h,仿真结果如下图9至16所示。
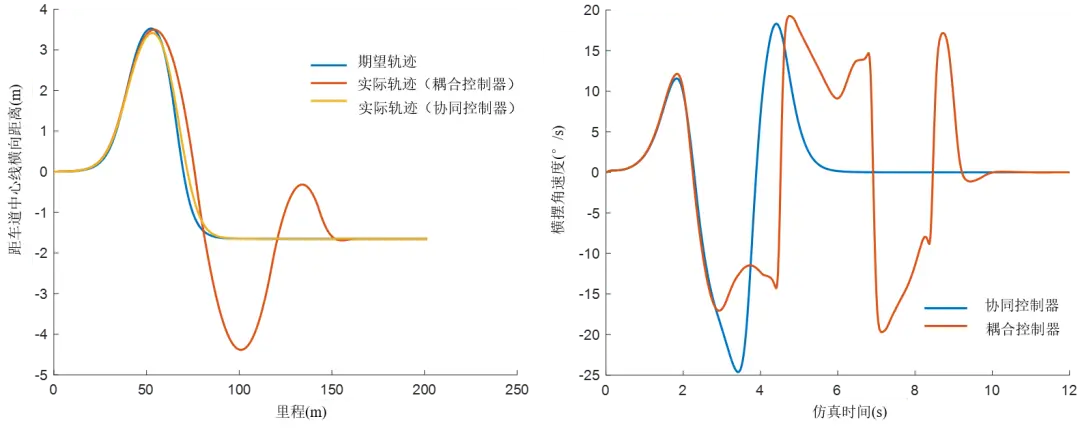
图9 车辆质心轨迹 图10 车辆横摆角速度
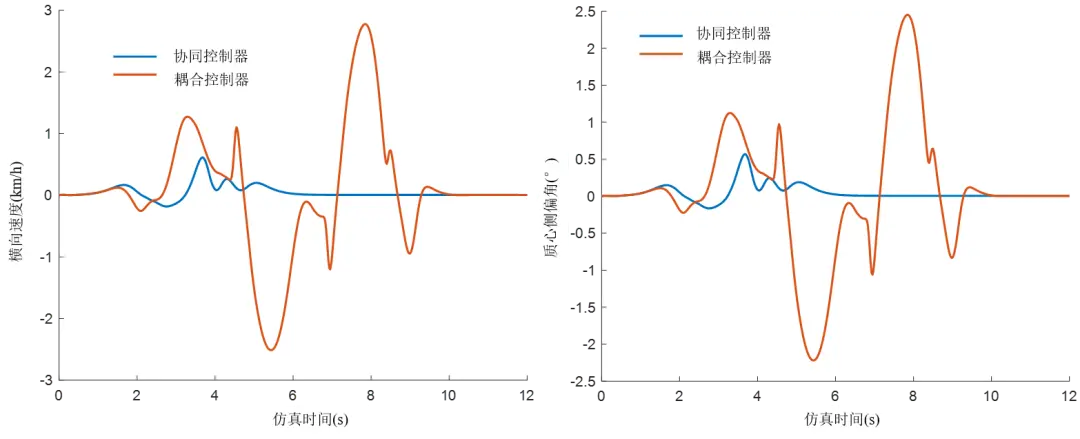
图11 车辆横向速度 图12 车辆质心侧偏角
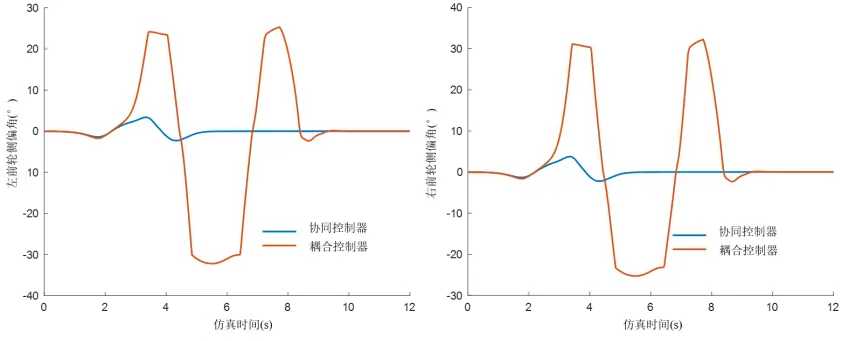 图13 左前轮侧偏角 图14 右前轮侧偏角
图13 左前轮侧偏角 图14 右前轮侧偏角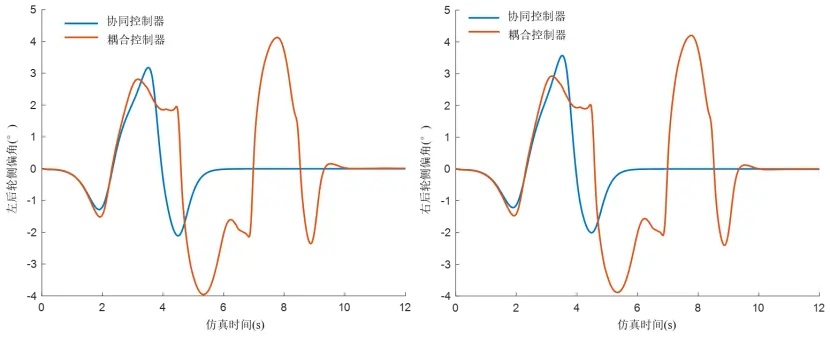 图15 左前轮侧偏角 图16 右前轮侧偏角
图15 左前轮侧偏角 图16 右前轮侧偏角
由图9至12可知,在采用未考虑车辆稳定性的轨迹跟踪控制策略时,车辆出现了侧滑失稳的情况,车辆侧向速度与质心侧偏角出现了较大幅度的波动,而采用所设计的协同控制,即使在车辆发生失稳时,也能够有效地抑制车身横摆角速度的变化,从而保证轨迹跟踪的精度。由图13至16可知,在采用未考虑车辆稳定性的轨迹跟踪控制策略造成车辆严重失稳的情况下,轮胎侧偏角也将超出合理范围,而采用所设计的协同控制则可将四个车轮的侧偏角控制在合理范围之内。
[4. 总结] 本文首先建立了分布式驱动车辆在三种转向模式下的车辆动力学模型,并基于模型对其分别进行了转向特性分析。其次,建立了车辆稳定性判据并完成了名义值设计及为解决相关参数不可测问题设计了观测器。在完成上述工作后,设计了分层控制架构的协同控制器,其主要分为上层控制器及下层控制器,上层为基于博弈论的协同控制器,通过上层协同控制器解算得到附加横摆力矩及前轮转矩,两者协同作用以兼顾车辆稳定性及轨迹跟踪表现。下层控制器则完成对期望附加横摆力矩的跟踪控制。最后,通过仿真及硬件实验,对所提出的控制器进行了验证,试验结果证实了所设计控制算法的有效性。



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
