




 广告
广告





















































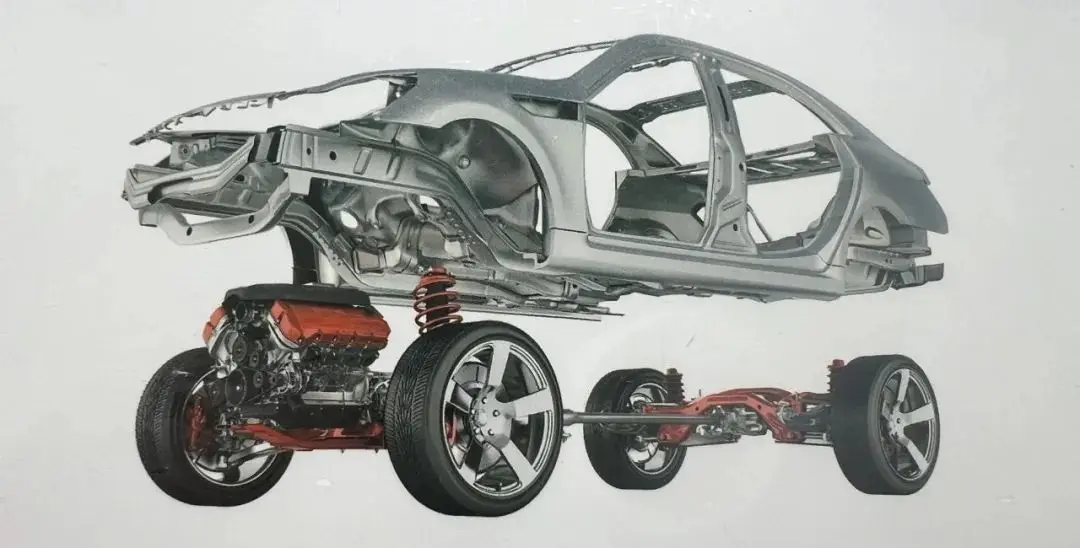
非线性汽车悬架系统减振控制方法:时滞非线性汽车悬架建模

作者:雷靖 马晓燕 吴杰芳 宋家庆
本文摘编自《非线性汽车悬架系统减振控制方法》,机械工业出版社出版

第一节 时滞非线性单轮悬架模型
考虑具有控制时滞和测量时滞的非线性二自由度单轮汽车悬架系统如图3.1所示。




第二节时滞非线性半车悬架模型
考虑具有控制时滞和测量时滞的非线性四自由度半车悬架系统如图3.2所示。





第三节时滞非线性整车悬架模型
考虑具有控制时滞和测量时滞的非线性七自由度整车悬架系统如图3.3所示





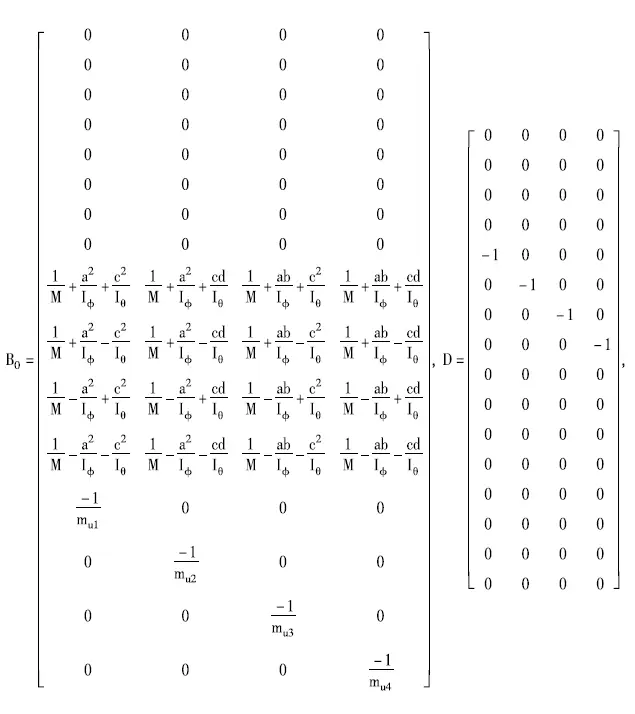




第4章 半主动悬架时滞控制


第二节非时滞依赖控制器设计
为了符合 Nyquist稳定性判据的要求,在画yquist曲线时相角应该满足

第三节 时滞依赖控制器设计
我们再找出穿越时滞需要满足的条件以此设计非时滞依赖的控制器等式



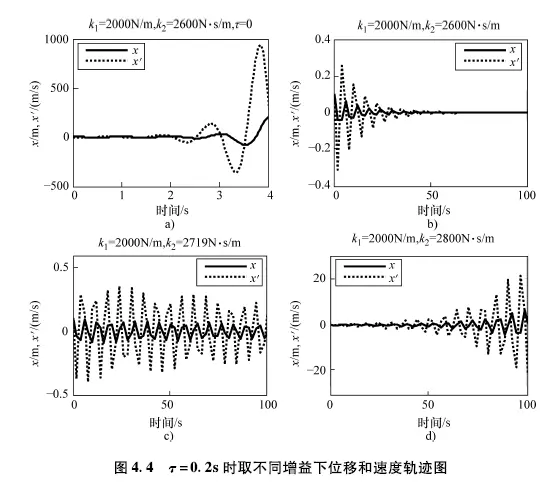
第四节仿真示例
以下以两个例子来验证满足和不满足镇定条件时的情况。悬架模型的参数值见表4.1[62]。图4.3和图4.4展示了簧载质量位移和簧载质量速度的Nyquist 曲线和状态轨迹。







本文摘编自《非线性汽车悬架系统减振控制方法》,机械工业出版社出版,经出版方授权发布。
本书结合作者与课题组成员多年的研究工作,介绍了时滞非线性悬架系统状态空间表达式的建立,包括单轮悬架、半车悬架和整车悬架;详细介绍了半主动时滞控制和几种非线性减振控制的设计方法,包括神经网络监督控制、滑模变结构控制、输入-输出反馈线性化控制、delta域很优减振控制、输入-状态采样控制以及输出反馈控制;在此基础上,运用悬架模型进行了仿真比较和验证。本书反映了作者与课题组的近期新研究成果。本书既包括理论推导、证明,又结合悬架模型进行了仿真验证,可供从事控制理论与应用的科研人员、工程人员、高等院校相关专业的教师、研究生、高年级本科生研究与参考。
- 下一篇:新能源汽车用DC-DC介绍
- 上一篇:五轴动力系统台架丨解锁整车极限工况的数字试炼场



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
