




 广告
广告





















































电动汽车传动系统扭振抑制方法研究

——基于前馈补偿与带通滤波的协同控制策略
一、问题背景与挑战
1.1 电动车传动系统特性
• 固有谐振特性:系统低阻尼导致5.8Hz固有频率(实测数据)
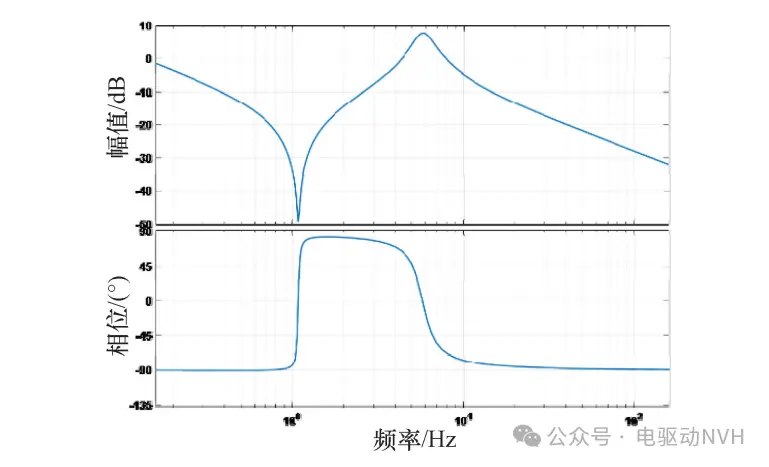
EV 的频率特性
• 工况敏感性:急加速/制动时电机转矩突变引发共振
• 非线性干扰源:齿轮齿隙(死区范围θ_dead=0.8°~1.2°)
1.2 现有方法局限
• 博世Anti-Jark策略:对常规路面有效,低附工况失效
• 传统前馈控制:忽略齿隙非线性,沙漠路面抖动超±1000rpm
• 模糊PID控制:相位补偿不足,响应延迟>50ms
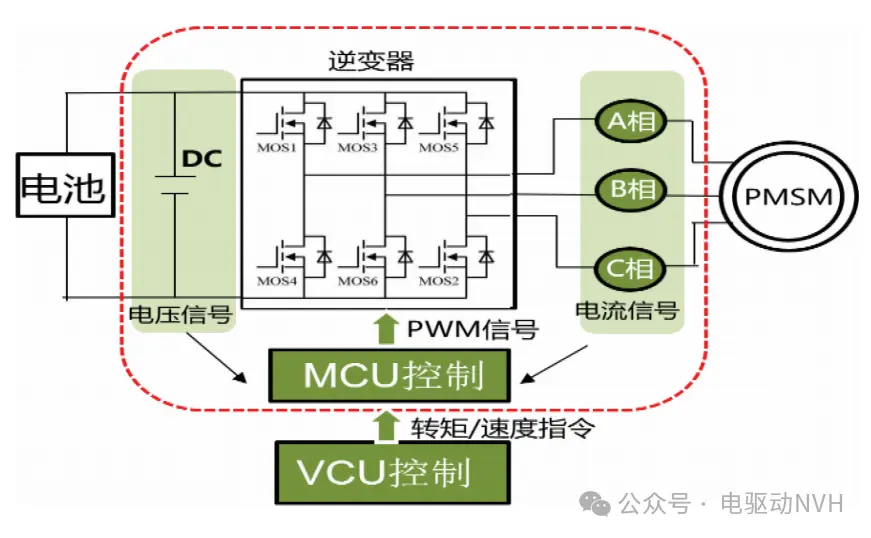
驱动系统构成

二、核心控制策略
2.1 系统建模与参数辨识

2.2 前馈补偿器设计
创新点:
• 齿隙死区建模:分段线性函数补偿
 • 微分增益计算:
• 微分增益计算:

• 控制效果:系统阻尼系数从0.15→1.0
2.3 反馈补偿器设计
带通滤波器参数:
• 中心频率:f_p=5.8Hz(谐振频率匹配)
• 传递函数:

• 相位补偿:在谐振频段实现180°相位反转

三、实车验证数据
3.1 城市铺装路面

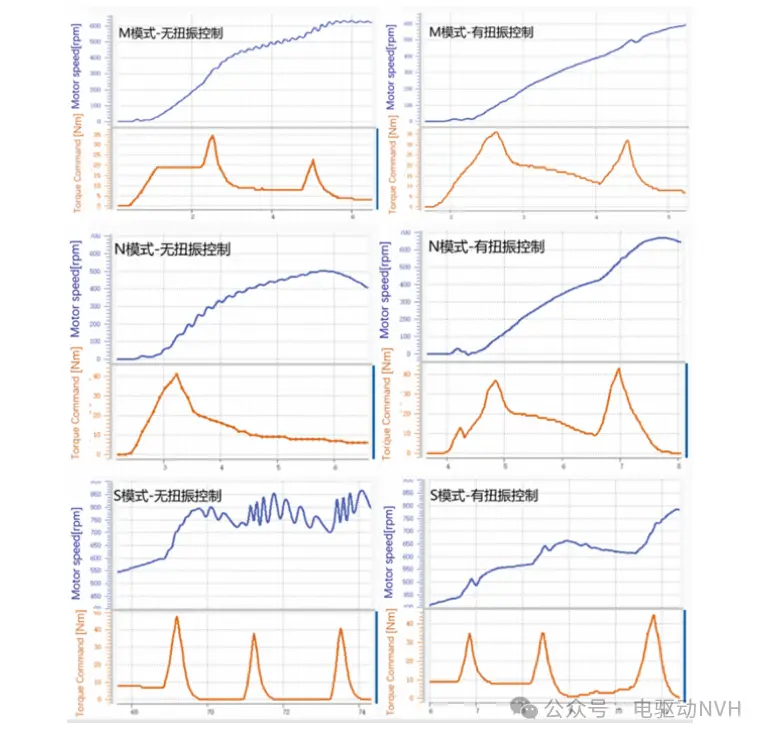
城市铺装路面扭转振动控制实验结果 (三种模式)
3.2 越野工况
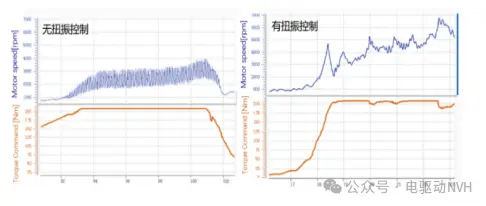
深雪路面:
• 轮速波动:±600 rpm → ±100 rpm
• 功率响应时间:缩短40%(800ms→480ms)

深雪工况扭转振动控制实验结果
沙漠路面:
• 反拖转矩波动:±180 Nm → ±50 Nm
• 抖动衰减时间:2.5s → 0.3s
沙漠工况扭转振动控制实验结果

四、工程应用建议
4.1 开发流程优化
1. 参数标定:
• 齿隙测量:激光测距仪实测θ_dead(精度±0.05°)
• 刚度标定:阶跃响应法获取K_d(误差<3%)
2. 控制器部署:
• 前馈补偿器更新频率:1kHz
• 反馈环路延迟:<0.5ms
4.2 故障诊断策略
• 谐振能量监测:

• 阈值设定:E_vib > 200 (rad²·s)触发报警

五、技术启示
1. 非线性建模必要性:齿轮齿隙死区显著影响控制稳定性
2. 相位补偿关键性:带通滤波器相位特性决定抗干扰能力
3. 全工况验证:需覆盖-30℃低温/50℃高温环境

本文核心价值:提供从建模、控制设计到实车标定的完整技术路径。
参考文献,张恺,《基于电机控制的新能源汽车传动系统扭振抑制方法》



编辑推荐




最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
