




 广告
广告





















































一文解析汽车控制器软件开发过程中的测试

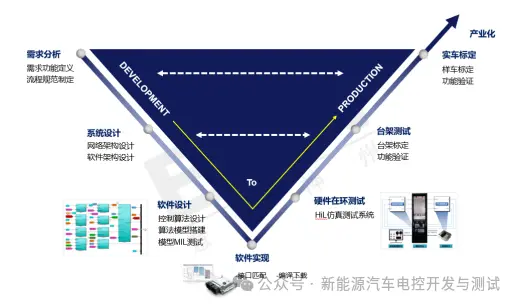
在新能源汽车控制器系统软件开发中,开发流程至关重要,它是保证开发软件质量的重要手段之一。开发的控制器软件需要经过各种不同层面的测试、调整和验证才能最终作为产品发布出去。控制器采用的测试方法和手段(如 MiL 测试、SiL测试、PiL测试、HiL 测试、实车测试等测试环节)通常遵循 V模型 的验证流程,从模型到代码、再到硬件和实际环境逐步验证系统的正确性和可靠性。以下是 MIL、SIL、PIL、HIL 和道路测试的详细解释,包括各环节的核心目标、实施方法、工具链及实际应用场景。
01、测试参考标准
能源汽车控制器软件开发过程中,一般参考以下标准

02、MiL测试
MiL测试(Model-in-the-Loop,模型在环测试):
在控制算法开发初期,将算法模型与被控对象模型(如车辆动力学模型)连接形成闭环,通过仿真验证算法逻辑的正确性。目的:在代码生成和硬件实现前,尽早发现算法设计缺陷,降低后续开发风险。

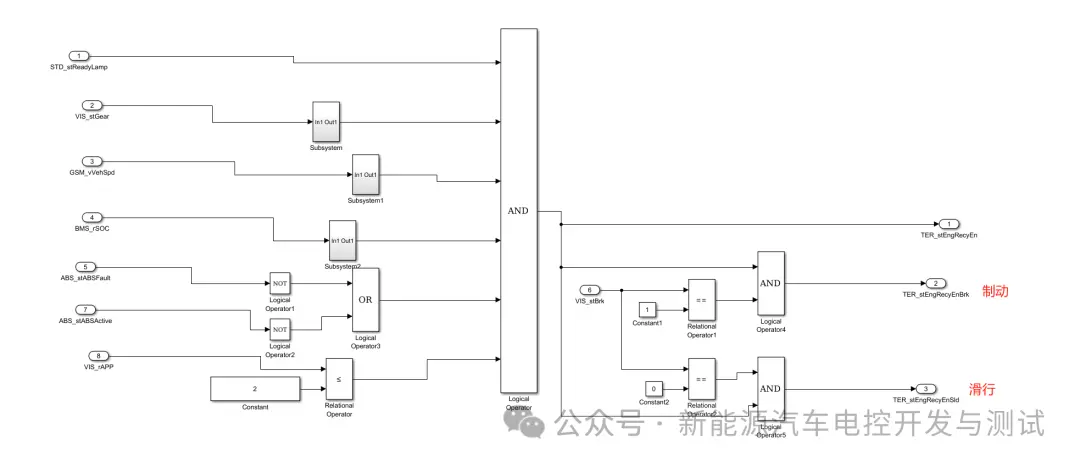
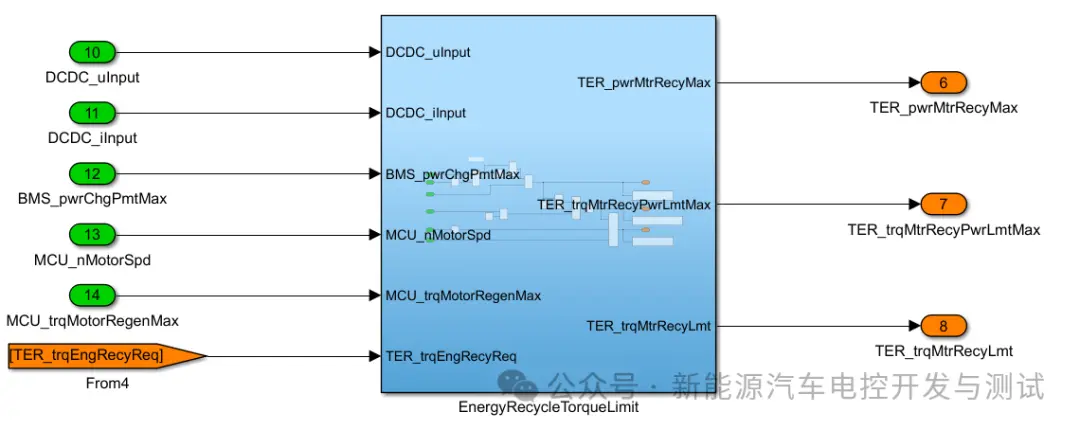
在MATLAB/Simulink中,控制策略搭建完成后,进行模型在环测试(MiL),用于在生成代码之前保证控制逻辑的正确性与准确性。根据目标车辆特性搭建车辆模型(或在已有模型基础上修改,车辆模型不作为本项目提交物),并设计测试用例,对控制策略模型进行测试,提供详细的测试报告。
MiL 测试内容主要包括:
1)搭建模型测试环境
2)模型测试与模型完善
3)撰写测试报告
MiL测试流程:
-
定义测试用例:覆盖正常工况、边界条件、异常输入(如传感器失效)。
-
运行闭环仿真:输入测试激励,观察算法输出与被控对象的动态响应。
-
对比预期结果:验证逻辑是否符合需求(如转向角度是否准确跟随指令)。
模型设计阶段,整个模型都以浮点运行,所以保证了计算的精度和合理的取值范围。建议使用第三方提供的RCP工具对MIL的结果进行实际验证。
03、SiL测试
SiL测试(Software-in-the-Loop,软件在环测试),将控制模型生成的代码(如C代码)在PC环境中运行,验证生成代码与原始模型的功能一致性。目的:确保代码生成工具(如Simulink Coder)未引入逻辑错误,验证代码在非实时环境下的行为。
在控制器系统软件开发中,受限于目标平台的计算资源与成本约束,将基于PC环境开发的浮点模型转换为定点化嵌入式C代码成为关键环节。为确保模型在资源受限的嵌入式CPU上的功能等效性,需采用软件在环(Software-in-the-Loop, SIL)验证方法,通过自动代码生成工具(如MATLAB/Simulink的Real-Time Workshop或RCP平台)将控制器模型转换为符合MISRA-C等标准的可移植代码。在此过程中,自动定标(Auto-Scaling)技术被用于平衡定点数表示的计算精度、数值范围和代码执行效率,同时保持与原始浮点模型的功能一致性。生成的C代码需通过S函数封装机制集成至仿真环境,替代原控制器模块并与被控对象模型进行联合仿真验证,其仿真时序需严格匹配目标CPU的实际运行特性。该流程要求工程师对代码生成策略(包含内存分配、算法优化及中断处理等)进行精细化配置,以确保生成代码在功能正确性、实时性和资源利用率等方面满足工程化部署需求。
SIL测试流程:
-
生成代码并编译为PC可执行文件(如DLL)。
-
使用与MIL相同的测试用例,在PC端运行代码。
-
比对代码输出与模型仿真结果(允许微小的数值精度误差)。
04、PiL测试
PIL测试(Processor-in-the-Loop,处理器在环测试)是将模型生成的嵌入式代码(如C代码)编译到目标处理器上运行,并通过调试接口(如JTAG)与PC端测试框架连接,验证代码在真实处理器上的功能与性能。PIL测试是系统开发中的关键验证环节,介于SIL(软件在环测试)和HIL(硬件在环测试)之间,用于验证生成代码在目标处理器(如MCU、DSP)上的运行行为与原始模型或PC端仿真的一致性。其核心目的是检测代码在目标硬件环境下的潜在问题(如编译器优化、内存分配、浮点精度等),确保软件与目标处理器的兼容性。
在控制器软件开发系统的工程化部署中,处理器在环(Processor-in-the-Loop, PIL)验证是衔接软件仿真与硬件实现的关键阶段。该阶段需基于SIL验证后的定点化模型,利用自动代码生成工具(如MATLAB/Simulink RTW或RCP)生成目标处理器架构(如ARM Cortex-M系列)优化的嵌入式C代码,并通过专用编译器链(如GCC ARM)将其编译为机器码,下载至目标评估板(DEMO Board)运行。PIL的核心在于构建跨物理边界的闭环验证环境:通过串口、JTAG或以太网等通信接口,将仿真环境中的测试用例输入数据实时传输至目标处理器,同时回传控制算法在真实硬件上的运算结果至被控对象模型,以此验证代码在真实时钟周期、中断响应及内存约束下的功能一致性。值得注意的是,PIL的实现高度依赖处理器外设兼容性与调试接口支持,部分异构架构或低资源芯片可能因缺乏硬件抽象层(HAL)适配而无法完成闭环数据交互。
在完成PIL验证后,需进一步将算法代码与硬件层驱动(如ADC/DAC接口、PWM输出等)进行协同编译,生成完整的可执行映像。此阶段需解决算法与硬件的时序同步、中断优先级配置及内存映射冲突等问题,同时建立硬件驱动接口的标准化封装库,以实现算法迭代时驱动层的解耦复用。最终,通过目标硬件在环(Hardware-in-the-Loop, HIL)测试验证系统级实时性,形成符合ISO 26262或IEC 61508等安全标准的嵌入式控制软件基线版本。工具链选择需综合考虑目标芯片生态支持,例如采用Keil MDK、IAR Embedded Workbench等商用IDE或开源框架(如Zephyr RTOS)完成最终部署。
PIL测试流程
-
生成代码:从控制模型(如Simulink)生成目标处理器的嵌入式代码。
-
编译与下载:使用目标编译器编译代码,通过调试器烧录到处理器。
-
运行测试用例:
从PC端发送测试输入(如传感器模拟数据)到处理器。
处理器执行代码并返回输出结果到PC端。
-
结果比对:
将处理器输出与MIL/SIL阶段的仿真结果对比,检查误差是否在允许范围内(如浮点精度误差小于0.1%)。
记录代码执行时间、内存占用等性能指标。
05、hil测试

HIL测试(Hardware-in-the-Loop,硬件在环测试)是一种用于复杂控制系统开发的测试方法,通过将真实的硬件控制器与虚拟的仿真环境相结合,验证硬件和软件在接近真实工况下的性能和可靠性。HIL测试将被测控制器(ECU)与实时仿真器连接,通过模拟传感器/执行器信号,验证控制器硬件与软件的集成性能。
HIL测试的核心原理
-
真实硬件 + 虚拟环境
将被测的真实硬件(如汽车ECU、飞行控制器等)接入测试系统。
通过实时仿真器(Real-Time Simulator)模拟被控对象(如发动机、电机、传感器、执行器等)的物理行为,并生成动态信号。
-
闭环测试
硬件控制器根据仿真环境提供的输入信号进行计算,输出控制指令。
仿真环境根据控制指令实时调整模拟的物理状态,形成闭环反馈。
HiL 测试内容主要包括以下内容:
-
整车控制器核心控制算法功能测试;
-
诊断功能测试;
-
网络通信测试;
-
极限工况模拟测试;
-
编写 HL 测试报告;
测试流程:
-
搭建HIL台架:将ECU接入仿真系统,连接电源、总线、IO接口。
-
加载被控对象模型:在实时仿真器中运行高精度模型(如发动机模型)。
-
注入测试场景:模拟极端工况(如-40℃低温启动)、故障(传感器短路)。
-
监控与记录:通过上位机软件(ControlDesk)监控ECU响应,记录数据用于分析。
HIL测试是连接虚拟仿真与真实硬件的桥梁,通过高保真度的实时仿真,确保控制系统的功能安全性和可靠性。随着自动驾驶、新能源等技术的发展,HIL测试已成为复杂系统开发中不可或缺的一环。
06、道路测试
将控制器集成到真实车辆中,在实际道路环境中验证系统性能。发现仿真中未覆盖的复杂因素(如路面颠簸、电磁干扰、极端天气),确保系统最终可靠性。

道路测试的关键流程
-
测试规划
定义测试目标(如特定功能验证)、场景(城市道路、高速、乡村)、里程要求等。
-
数据采集
通过车载传感器、摄像头、数据记录仪等收集车辆状态、环境信息及驾驶员行为数据。
-
场景复现与迭代
将实际路测中发现的问题反馈至仿真环境(如HIL、虚拟仿真),优化后再回归路测。
-
结果分析与报告
分析故障原因、性能瓶颈,生成测试报告以指导设计改进。
实车测试、标定工作在本项目指定的目标车型上进行,实现整车控制器的参数优化。实车测试与标定工作主要包括:
1) 制定试验大纲,对所需试验设备与试验路况进行说明,由主机厂提供试验条件、安排
试验;
2)进行试验,标定整车控制器参数:
3)编写试验测试报告;
4)编写标定说明文档,
07、各测试之间关系
测试流程顺序
MIL → SIL → PIL → HIL → 道路测试
逐步逼近真实环境:从纯模型到代码、再到硬件和实车,层层验证。
问题早暴露:在低成本阶段(如MIL)发现算法错误,避免后期(如道路测试)高代价修改。




编辑推荐




最新资讯
-
线控制动之机电制动(EMB)系统的综述:结
2025-04-13 09:30
-
「零重力」全球首个!中汽协会发布《汽车大
2025-04-12 21:00
-
自适应模糊控制尾翼设计及其制动性能研究
2025-04-12 20:57
-
振动试验及其设备中级篇 电动型振动试验系
2025-04-12 20:48
-
不会加塞的NOA不是好NOA?
2025-04-12 20:48
