




 广告
广告





















































线控制动之机电制动(EMB)系统的综述:结构、控制与应用

融合角位移和电流的信号可以提高夹紧力估计方法的精度和鲁棒性。Saric等人。基于动态刚度特性和力矩平衡方程设计了两种夹紧力估计模型。采用在职自适应技术来适应两种模型的磨损相关参数。此外,利用最大似然估计器对这两个独立模型的输出进行融合,给出了夹紧力的优化估计,具有良好的跟踪性能高度动态的情况。Bae等人结合遗传算法和卡尔曼滤波方法,将基于动态刚度特性和力矩平衡方程的估计结果融合,准确估计夹紧力。采用实编码遗传算法对噪声矩阵进行了优化,提高了卡尔曼滤波器的性能。实验结果表明,该估计算法在动态制动时的灵敏度较低。
4.2. 直接夹力控制
直接控制算法通过获取压力传感器、角位移传感器和电流传感器的反馈信号,实现了对夹紧力的闭环控制。表12总结了现有的夹紧力的直接控制算法。
表12.直接夹紧力控制算法
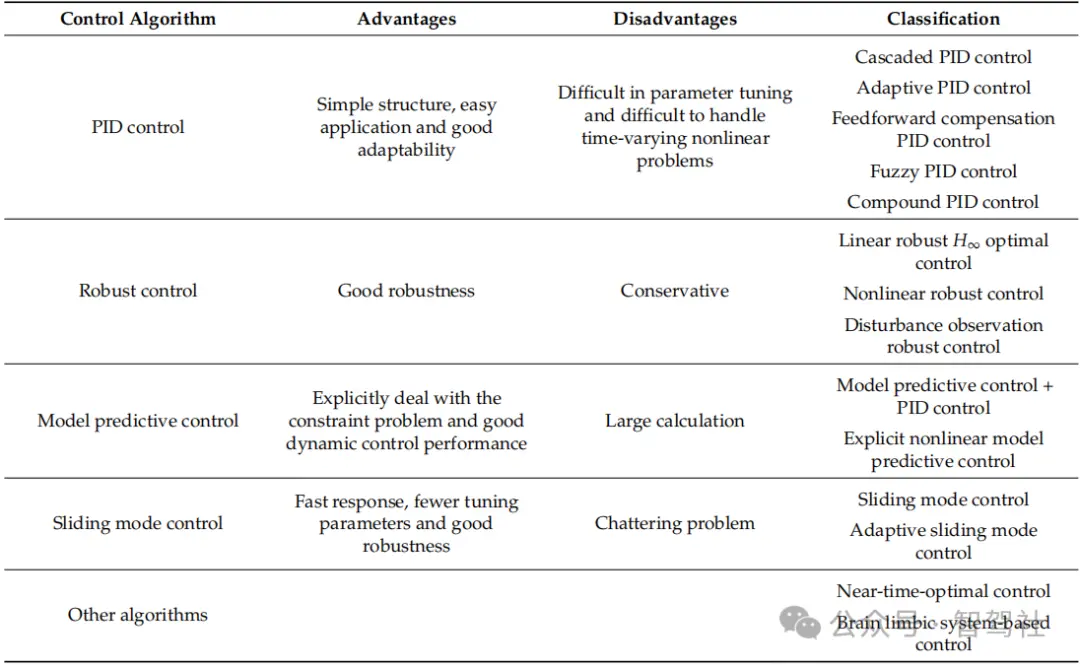
PID控制是直接夹紧力控制最常用的算法,具有结构简单、应用方便、适应性好等优点。在制动过程中,EMB执行器需要经历三个阶段:消除制动间隙,产生夹紧力和释放制动器。级联PID控制体系结构非常适合这三个阶段。在第一和第三阶段,采用中间速度回路来调整电机转速,提高执行器的响应速度。当制动间隙消除,驱动电机进入停滞状态时,利用夹紧力的外环精确跟踪目标夹紧力。此外,利用电流回路作为内环来调节电机的电流,充分发挥电机的过载能力,并提高电机电流控制系统的动态响应。由于三个闭环之间的耦合,需要进行迭代调整才能获得最佳的整体性能,而且参数调优的工作量很大。Li等人。采用基于Bode图的频域方法对PID参数进行调整,使控制器具有良好的跟踪性能,并能将超调控制在所需的范围内。然而,具有固定增益的PID控制不能有效地处理时变非线性问题,如负载相关的摩擦和刚度。Jo 等人.提出了一种自适应的PID控制算法,结合制动间隙控制算法来估计夹紧力,并根据夹紧力的变化在线调整比例增益系数,以获得更好的控制效果。为了解决高负荷下摩擦等非线性干扰问题,Line等在级联PI控制框架中增加了前馈摩擦补偿,提高了夹紧力控制的精度和跟踪性能。
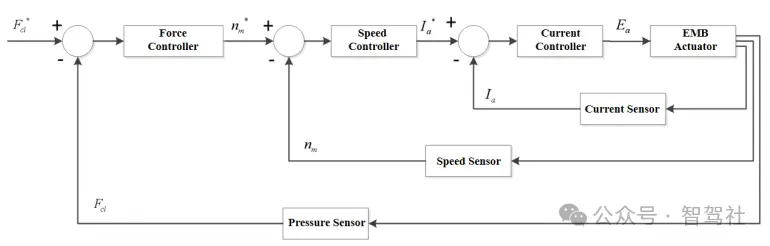
图 34. “力 — 速度 — 电流” 串级 PID 控制架构
为了实现对夹紧力的精确控制并提高不同阶段的响应速度,KI和LEE等人 [75] 提出了一种复合 PID 控制算法,该算法会根据目标夹紧力在力环和位置环之间进行切换。吉林大学的张等人依据目标功率、实际制动力以及电机转角位置的变化,将机电制动(EMB)执行过程划分为四个阶段,并根据各阶段的控制品质和特点设计了相应的 PID 控制策略。为提高不同阶段接触点识别的准确性,湖南大学的张等人[77] 设计了一个二阶卡尔曼滤波器来处理电流,并根据制动过程中夹紧力与电流之间的关系识别接触点。在此基础上,提出了一种针对不同阶段有特定控制目标的模糊 PID 控制算法,以实现更好的动态性能。



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
