




 广告
广告





















































线控制动之机电制动(EMB)系统的综述:结构、控制与应用

模型预测控制(MPC)可预测系统未来的动态特性,在线求解优化问题,并将最优解应用于系统以实现闭环控制。它能够明确处理约束问题,且具有良好的动态控制性能。莱恩等人 首先利用增益调度、摩擦补偿以及反馈线性化技术对串级 PI 控制的结构进行改进,然后进一步引入模型预测控制,以便更好地利用可用电机转矩。为便于实际应用,采用一种事后施加动态约束的无约束模型预测控制,以此降低计算需求。为避免对象线性化并简化控制器,李等人设计了一种显式非线性模型预测控制,通过最小化二次型性能指标来获得显式控制律。仿真结果表明,与现有的线性模型预测控制相比,显式模型预测控制的计算时间减少了 24%,并且在复杂制动操作方面性能略优。该算法的优化是离线进行的,通过使用查找表来减少计算开销。由于模型预测控制的连续动态优化过程需要大量计算,因此在实际应用中通常采用简化模型或离线计算的方法。
滑模控制(SMC)通过设计滑模面和趋近律使控制变量快速收敛。它不仅响应速度快、调节参数少,而且对不确定参数和外部干扰具有很强的鲁棒性。林德瓦伊 - 索斯(Lindvai - Soos)和霍恩(Horn)基于车辆制动系统的动态模型为执行器设计了滑模控制律,在滑模控制中把摩擦作为不确定因素加以考虑。实验结果表明,在不同输入信号下,滑模控制器与串级 PI 控制器相比具有更高的跟踪精度。韩等人 [84] 基于电子楔式制动器(EWB)的动态模型设计了滑模控制器。夹紧力是基于带有接触点检测的简化电子楔式制动器模型进行估算的。实验表明,该算法对参数变化和非线性因素具有鲁棒性。朴(Park)和崔(Choi)设计了一种自适应滑模控制器,它通过自适应调整摩擦模型的参数,并将摩擦补偿的前馈环节融入滑模控制器,以此降低估算误差,提高控制算法的鲁棒性。然而,当系统状态达到滑模面时,滑模控制会存在抖振问题,这将影响控制精度。因此,有必要采用滤波、添加观测器、模糊控制以及遗传算法等方法来优化控制过程。
为进一步提高控制精度,还提出了其他智能控制算法。李和曼齐(Manzie)[86] 设计了一种状态受限、鲁棒的近实时最优夹紧力跟踪控制器。他们首先针对具有状态约束的一般二阶非线性系统设计控制器,然后将其扩展到具有有界但可能随时间变化的干扰的受扰系统。样机测试证明,该控制器具有鲁棒稳定性,跟踪误差渐近收敛到一个包含原点的一致最终界内。金等人将一种基于边缘脑系统的仿生控制策略应用于机电制动(EMB)执行器,并通过遗传算法对控制参数进行优化。仿真结果表明,该控制方法在控制速度、参考跟踪以及对干扰的鲁棒性方面优于传统的 PID 控制。
5. 机电制动(EMB)系统架构与智能驾驶应用
智能驾驶的进一步发展对制动系统提出了更高的要求。根据当前行业内技术水平和需求的调研结果,从 L0 到 L5 级自动驾驶对制动响应时间、控制精度、集成控制以及功能安全的基本要求如图 35 所示。作为未来制动系统的最终方案,机电制动(EMB)系统应满足高级别自动驾驶的要求
快速响应与精确控制:L4 级及以上自动驾驶在车辆动力学控制方面对主动制动的响应速度和控制精度提出了更高要求。对于机电制动(EMB)系统而言,制动响应时间应在 100 毫秒以内,稳态控制精度应达到 0.1 兆帕;
・高度集成控制:驱动、制动和转向的协同控制要求各子系统的控制集中于底盘域控制器。在底盘域控制器的框架下,机电制动(EMB)系统需要具备高度的控制自由度以实现集成控制;・良好的冗余安全性:从辅助驾驶(L1 和 L2 级)到自动驾驶(L3 级及以上),智能驾驶系统的功能安全是一个关键问题,有必要确保系统在出现单一故障时仍能接管控制。制动冗余是功能安全的重要组成部分。对于机电制动(EMB)系统,必须通过执行器(双电机设计)、控制算法(基于夹紧力估算的间接控制)以及系统架构的冗余设计来满足汽车安全完整性等级(ASIL)中 D 级的功能安全要求。此外,还需满足预期功能安全和信息安全方面的要求。
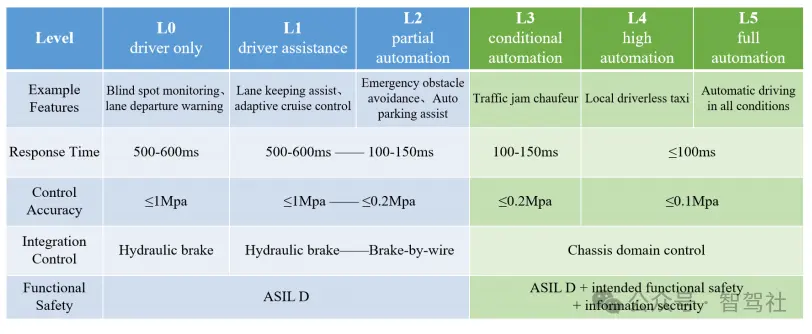 图 35. L0 - L5 级自动驾驶对制动系统的基本要求
图 35. L0 - L5 级自动驾驶对制动系统的基本要求
接下来将首先根据功能安全要求分析机电制动(EMB)系统的架构,并总结基于机电制动(EMB)系统的传统车辆稳定性控制(包括防抱死制动系统(ABS)、电子制动力分配系统(EBD)、牵引力控制系统(TCS)、电子稳定控制系统(ESC)等)方面的研究。在此基础上,介绍机电制动(EMB)系统在智能驾驶中的初步应用,即先进驾驶辅助(包括自动紧急制动(AEB)、自适应巡航控制(ACC)等)方面的研究



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
