




 广告
广告





















































重型商用车辆和客车的动力学——车辆模型

吉林大学汽车仿真与控制国家重点实验室组译,李杰教授领衔翻译,郭孔辉院士为手册作序。
本文摘编自《车辆系统动力学手册 第2卷,整车动力学》 ,机械工业出版社出版

19.5 车辆模型
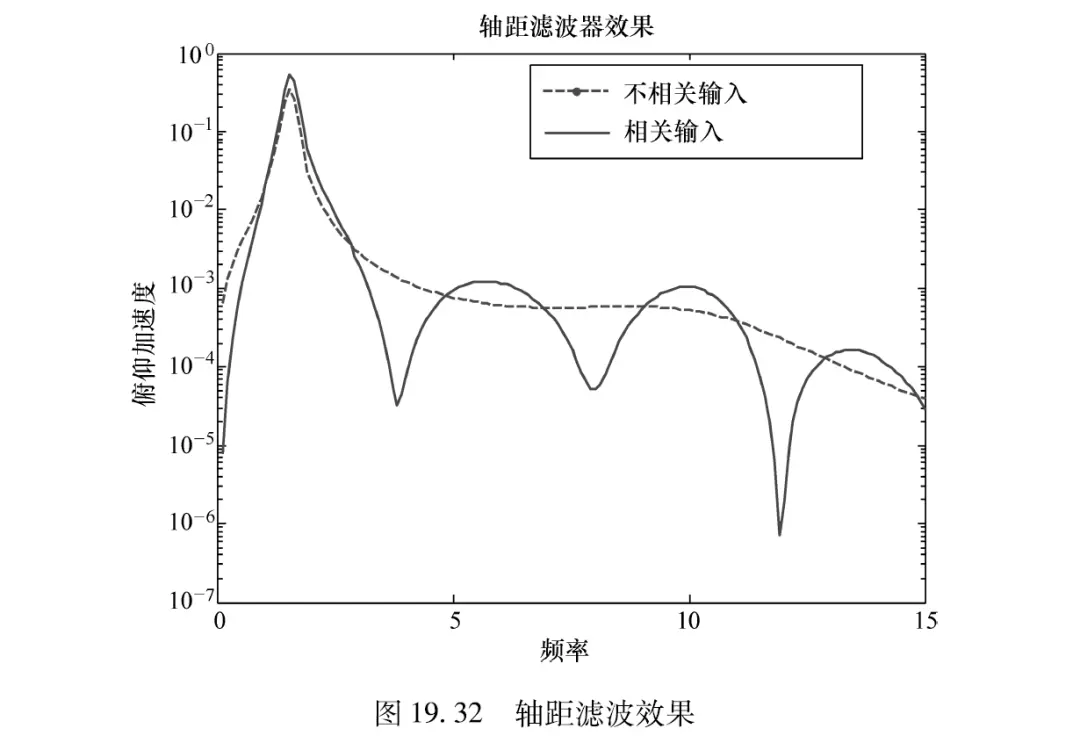
数学建模是理解和分析车辆动力学的基础,不论是振动分析还是操纵分析。重要的是模型要包含分析的相关现象,如果模型简单但是满足要求也是优点。例如,如果模型只包含感兴趣的模态是足够的,不必要高的复杂性使得难以正确建模和说明结果。使用当前的多体系统(MBS)软件,容易建立有许多自由度(DOF)的大模型而无需建立方程,其由软件完成。方程没有错误显然是一个优点,但是缺点是不利于了解发生的过程,对结果的解释也更加困难[36,37]线性模型有很多优点,有利于定性研究,因为分析容易在频域中进行。通常,悬架含有高度非线性的元件。例如,钢板弹通常有大量的摩擦,减振器具有非线性特性。然而,这些元件的线性特性可以通过非稳态激励下的非线性特性分析获取。然后,线性模型使用这些线性化的特性进行线性分析。同样,轮胎的非线性特性可以线性化,并且用于侧向动力学分析[38]模型的验证总是重要的,尤其对于大型模型,其是必不可少的。有各种方法进行验证。一种是场地测试。对于操纵模型,这是唯一可选,并且是一个好的方法。对于有路面输入的模型,优点是激励是现实的,然而缺点是难以获得精确的输人。因此,由路面测量可能得出错误的结论,例如,由于路面激励的周期性会在谱中给出峰值,其可能被误解为共振。所谓的轴距滤波器是另一个现象,其对谱进行滤波,从而导致新的峰值或衰减共振峰值[39]。由于缺乏激励机理的知识,在解释测量结果的过程中,会产生许多错误。一个简单的二自由度垂直-仰模型的轴距滤波效果,如图19.32所示。相关输入意味着前后轴的输人有一个固定的时间延迟,如果速度是恒定的,这导致轴距滤波的效果。验证垂直输入下车辆模型的一个好的方法,是使用在每个车轮上产生垂直输人的道路模拟器。在Gothenburg(哥森堡)的Volvo(沃尔沃)道路模拟器,如图19.33所示,其可以用于可视化各种现象。道路模拟器测试可以得到可重复的测量结果,并且激励被很好控制和已知。为了能够正确比较不同的车辆构型,独立于速度,不同的车轴上的激励将是不相关的。

如果要估计前钢板弹簧的疲劳寿命,当然可以使用具有大量自由度的非常详细的车辆模型。通过研究弹簧力和弹簧应力的影响因素,可能降低复杂性。由线性模型可以看出,通过车架柔度定义的结构模态、底盘布置和驾驶室/发动机安装的影响可以忽略不计,轴距滤波器的效果也可以由弹簧力的RMS(均方根值)看出。图19.34 给出了力的RMS与速度(路面不平度系数)不成正比,这种情况应当如此,其中路面的频率指数为3。
然而,相比于前轴,其他轴的作用相对较小。如果惯量的平方半径与质心至前、后轴距离的乘积之比的关系等于1,即动态指数为1,则其他轴没有任何作用,因为所有轴上的输入动态解耦。因此,使用只有前轴输入的模型就足够了。图19.35给出了2自由度的“四分之一车”模型(实线)与7自由度的车身和轴侧倾的“半车”模型(虚线)弹簧力的PSD(功率谱密度)比较。轴的共振不同,范围为8~12Hz。但是可以看出,动态弹力主要由低频变形引起,2自由度模型可以用于主要研究。悬架的非线性特性是重要的,即包含钢板弹簧滞后、副簧作为缓冲限位的强非线性和具有非线性特性与弹性附件的减振器前钢板弹簧的疲劳寿命,通过使用雨流计数法对仿真的时间响应进行预测参考弹簧设计的最大应力为材料疲劳极限的两倍。为了进行比较,将恶劣条件下的软弹簧作为参考。
在图19.36中,应力水平的交叉分布,表示路面描述的影响。平稳和非平稳的路面具有相同的RMS值和频率指数,非平稳的路面由好的和坏的路面混合而成,而平稳路面有恒定的路面质量。在平稳情况下,对疲劳寿命的适当估计是不可能的。最大应力小于疲劳极限,这将导致无限的疲劳寿命[40]
表19.1给出了路面描述、模型类型、运行严重程度和弹簧刚度如何影响疲劳寿命。

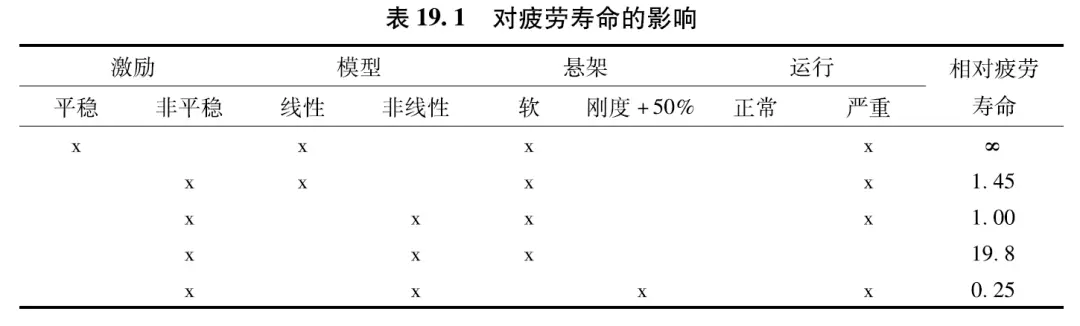
非线性模型不如非平稳路面描述那么重要,运行严重程度对疲劳寿命的影响非常大。有趣的现象是,软的悬架不仅提高了平顺性,而且还改善了钢板弹的疲劳寿命。
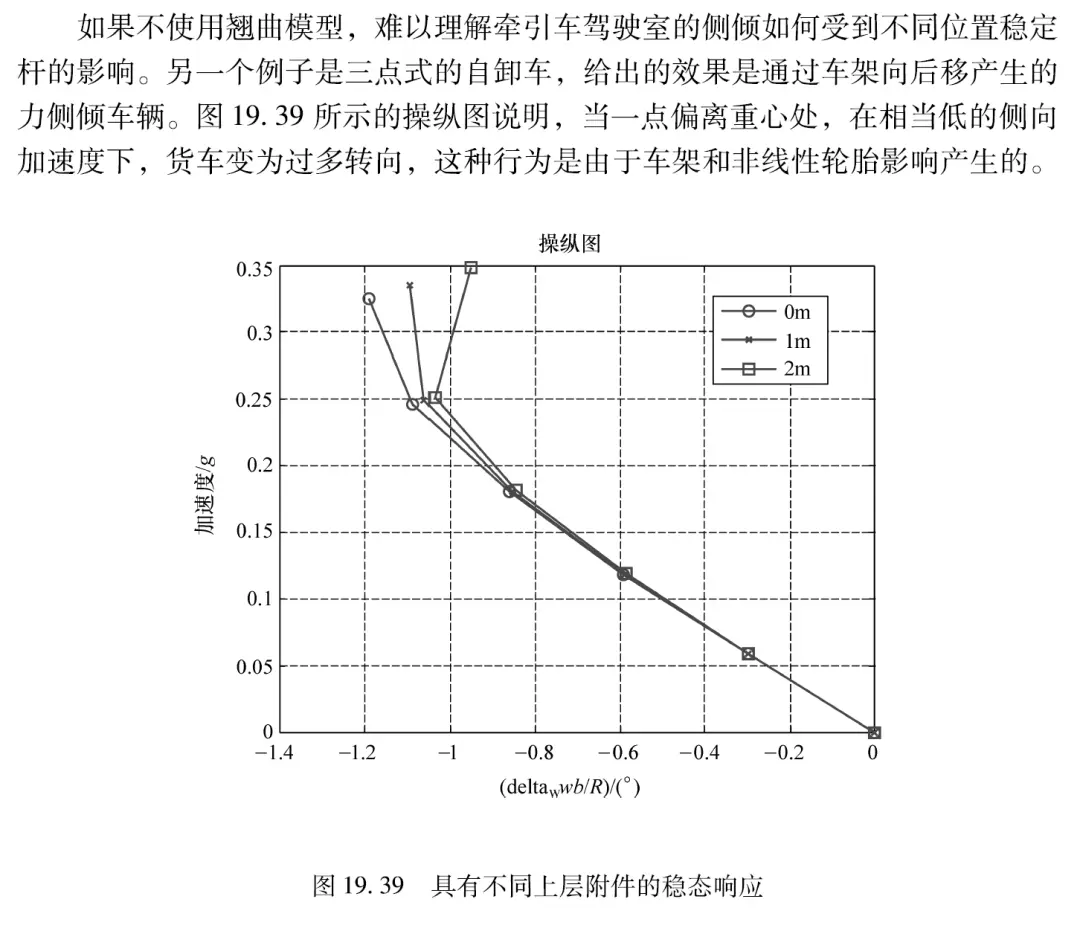
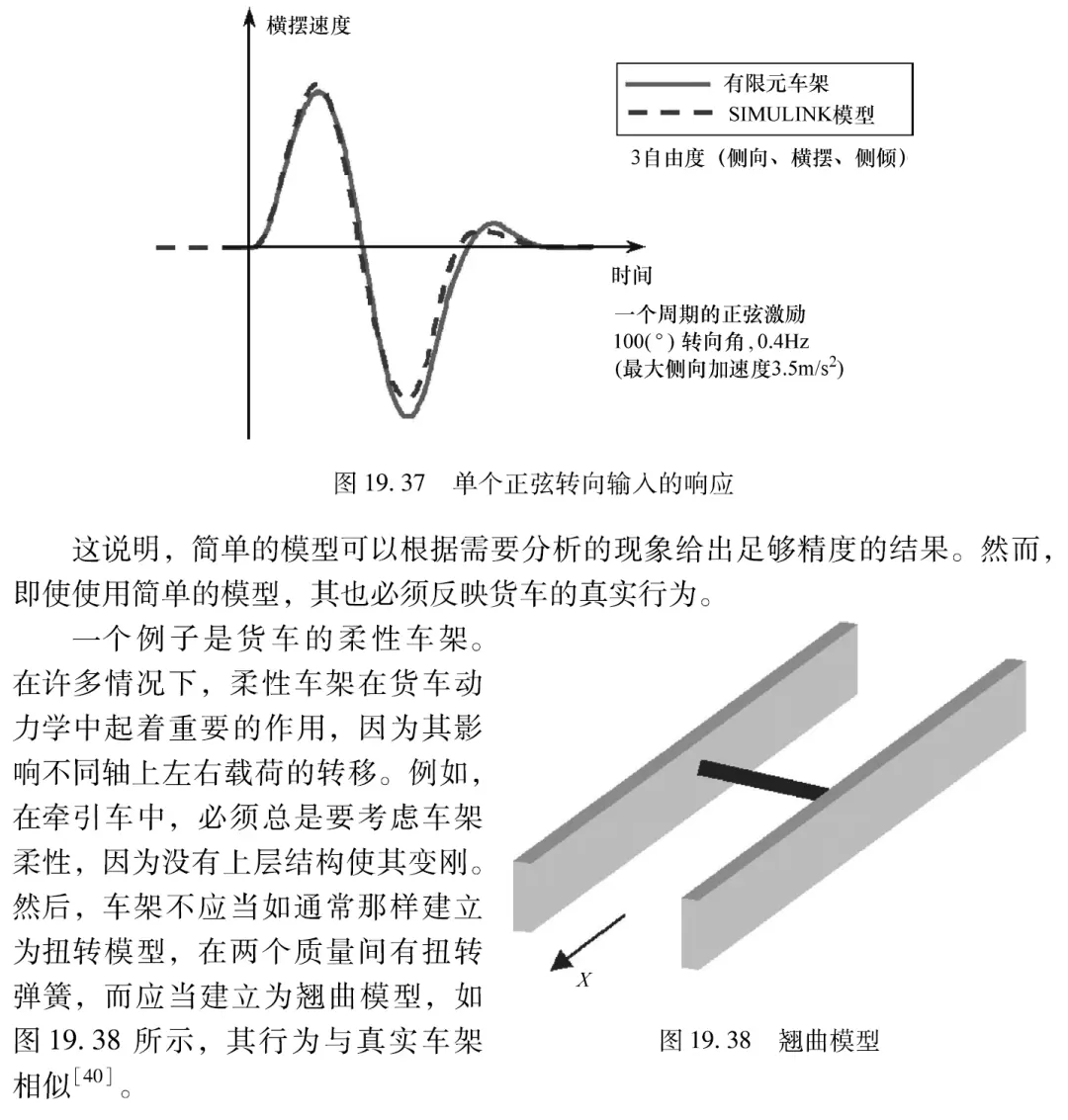
对于操纵性分析,相当多的基本特性使用简单的线性或非线性的二自由度型可以得到满意的分析。同样,对于组合车辆的定性分析,使用每个车辆单元有横摆和侧滑自由度的模型可能就足够了,最重要的非线性特性是轮胎的非线性。图19.37中的例子给出了单个正弦转向输人下由刚性三轴货车的两个不同的模型得到横摆速度响应,一个是具有柔性有限元车架的复杂多体系统模型,另一个是简单的三自由度模型。比较的结果表明,尽管在复杂性上有大的差异,但是两个模型的结果有良好的一致性。
19.6 验证和确认
不同车辆动力学特性的验证是产品开发过程中重要的一部分,先决条件是有特性要求。对于每个特性,要求由一组量化参数组成。显然,至关重要的是这些参数与其测量的特性感知相关,这是确认的一部分。验证不仅针对实际原型,也针对完全验证过的车辆模型。验证过程使用模型的一个原因,是能够验证在不同条件下使用大量不同的车辆规格。
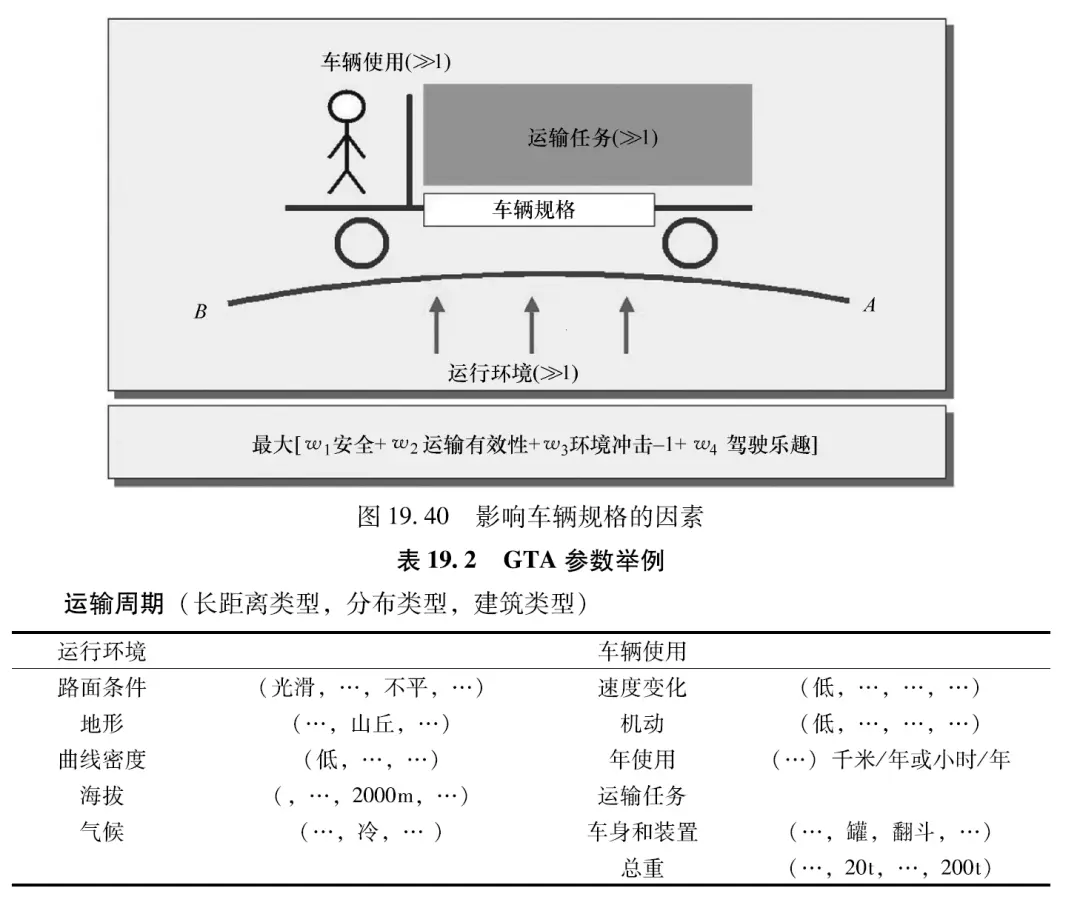
为了验证车辆动力学特性,绝对需要知道车辆在什么环境下使用和如何使用车辆。图19.40说明车辆规格如何受到运行环境、车辆使用和运输任务的影响。最佳的车辆规格可以被看作为特性区域的优化,可根据客户的喜好配置。已经定义了许多独立于车辆的参数,这些参数指定了世界各地运输业务的运输任务、运行环境和车辆使用的差异。这些参数定义为全球货车应用(GTA)GTA 参数的一些例子,见表19.2。


19.7 结论
20个世纪后半期,重型车辆和重型车辆动力学有了巨大的发展。运输效率需求的增加、专用和优化车辆的要求、更好的主动安全性与振动环境的需要是其
发展的动力。开发过程中最重要的是理解动力学的各方面和设置客观的需求数学模型是基础,但是要避免不必要的模型复杂化。验证应当针对实际车辆和数学模型进行,未来需要基于客观评价准则而不是主观评价。
辅助驾驶员的主动控制系统正在迅速发展,将其增加到有良好被动性能的货车上,可提高货车的安全性。
本文摘编自《车辆系统动力学手册 第2卷,整车动力学》 ,机械工业出版社出版,经出版方授权发布。
本丛书对车辆系统动力学建模、分析与优化,车辆概念和空气动力学,充气轮胎和车轮-道路/越野,车辆子系统建模,车辆动力学和主动安全,人机相互作用,智能车辆系统,以及车辆事故重建被动安全进行了全面描述。
本丛书由来自23所大学与9家知名企业的50余位专家共同编写,以科学界与工业界的视角对知识结构进行了平衡,代表了目前车辆系统动力学技术发展的水平,适合汽车工程师与汽车专业师生阅读使用。



编辑推荐




最新资讯
-
绿氢储能新引擎--艾德克斯IT-M3900C双向
2025-04-15 09:34
-
标准解读 | 越野车“加电”就变强?背后的
2025-04-15 09:30
-
国内首个!100%国产化!广州检验中心联合完
2025-04-15 09:25
-
SDmap LDmap HDmap傻傻分不清楚
2025-04-15 09:24
-
R171.01对DCAS的要求②
2025-04-15 09:24
