




 广告
广告





















































残余总线仿真(RBS)在测试平台中的应用介绍
2018-04-02 18:26:27· 来源:泛华测控

大众一直在发动机研发测试领域内寻求残余总线仿真的新解决方案。目前,残余总线仿真已成为构建自动化系统(AuSy)测试平台的必要组成部分,然而它适用的范围是有限的。因为所有的测试平台都具备CAN总线结构,因此需要一个网关解决方案。因此,GOEPEL提出了模块化解决方案,其不但避免了封闭式的设计理念,相反还能支持开放的
大众一直在发动机研发测试领域内寻求残余总线仿真的新解决方案。目前,残余总线仿真已成为构建自动化系统(AuSy)测试平台的必要组成部分,然而它适用的范围是有限的。因为所有的测试平台都具备CAN总线结构,因此需要一个网关解决方案。因此,GOEPEL提出了模块化解决方案,其不但避免了封闭式的设计理念,相反还能支持开放的标准、工具和接口。
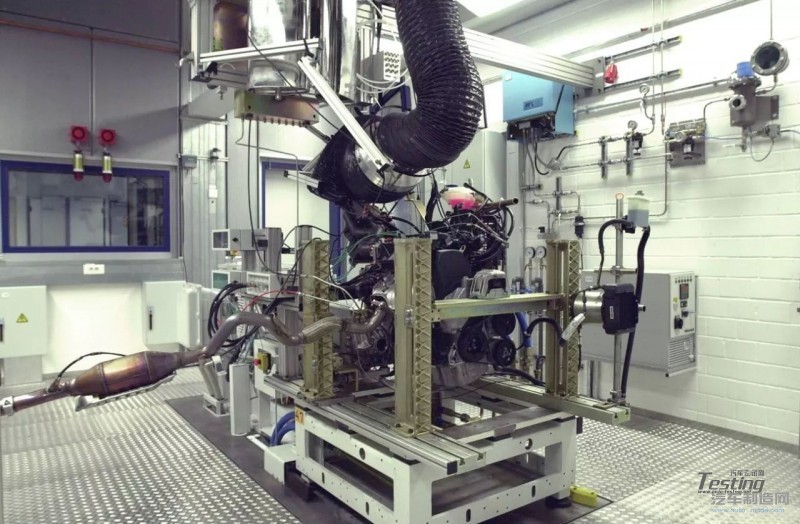
图1:德国大众集团集成测试平台
需求
新的残余总线仿真解决方案要求不仅可以支持CAN总线,还要支持LIN/FlexRay。同时,还需具备模拟和数字I/O作为一个完整的工具链,用户可自己集成代码和功能模块。同时,“参数配置取代编程”的设计理念也是首要的。残余总线仿真的变量部分,应通过使用标准工具进行配置和参数化来实现创建和调整。
在大众集团的正式筛选过程中,分别对多家供应商的现有产品的运转周期和性能进行了测试。GOEPEL的stand-alone box产品及以Ethernet接口连接的自动化系统测试平台解决方案以其能独立于自动化系统(AuSy)运行的能力,最终脱颖而出。将其安装在靠近测试对象的位置,可以减少所需电缆的长度,降低布线工作量。
单一来源的软硬件
该方案最终选择了使用GOEPEL的61系列Controller—basicCAN61plus模块。该款产品提供3个CAN总线端口(2 x motor CAN, 1 x AuSy CAN),1个LIN接口(附属),2个FlexRay接口,6路模拟和8路数字I/O作为选配。此外,该产品还配有强大的600 MHz PowerPC CPU,用于运行残余总线仿真,并具备千兆以太网接口和USB 2.0接口,以及集成1个“terminal 15”的继电器。

图2:GOEPELRBS产品(basicCAN61PLUS)
除此之外,德国大众还使用了GOEPEL的Net2Run软件包来创建编写残余总线仿真程序。该软件可以使用户在几分钟内创建一个可执行的静态残余总线仿真序列。所需信息将通过车载网络数据库导入,如:DBC-,LDF-或FIBEX-数据库,同时选择需要仿真的控制单元及其对应的报文信息。校验和计算、报文计数器以及所需的LIN和FlexRay发送时间序列都是自动配置的。同样,PDU多路复用器的整个PDU触发和FlexRay更新位的处理也是如此。最后,用户只需要选择配置那些在运行时能够在RBS程序中访问的信号,之后生成的RBS文件将存储在RBSbox中。RBS程序将加载并运行此文件。或者,残余总线仿真可以直接通过Net2Run软件内部启动。
残余总线仿真—一种模块化的方法
为了通过AuSyCAN端口控制残余总线仿真,GOEPEL的RBSbox必须配置为网关,其具体可通过Net2Run中的网关编辑器来完成。需要发送的信号映射到路由表中,如果适用,则添加附加缩放比例参数或偏移量。这些信息也将存储于RBS文件中。
为了独立于任何PC或AuSy运行,RBS盒还需要RBS程序(用户代码)。它是一个小型的C或C ++程序,使用GOEPELAPI函数来访问GOEPEL电子硬件及其各个固件功能。大众使用了可切换版本的RBS程序,例如:手动或自动变速箱。一个简单的RBS程序可使所有的接口初始化,并根据需要激活/抑制终端电阻,然后再加载RBS文件并开始残余总线仿真。一旦识别到来自发动机控制单元的有效报文信息,RBS程序就会启动残余总线仿真的Tx-PDU组,并在发动机不再发送任何报文信息时相应地停止它们。除外,RBS程序既可以控制模拟和数字I/O,也可以包含用于动态残余总线仿真的信号基础模型或功能。这些功能可以在程序库中组合起来,以便在不同的RBS程序中重复利用。
大众依靠GOEPEL电子的Net2Run-ID作为创建车载RBS程序的工具。这个根据开发环境的编译器包含RBS盒创建和调试C及C ++程序的所有必要组件。RSB盒中的程序在QNX实时操作系统下运行。所有残余总线仿真所需的功能都包含在GOEPEL API中,其也可以在Windows下使用。除了标准的C库之外,用户还可以从众多的兼容POSIX的QNX库中受益。
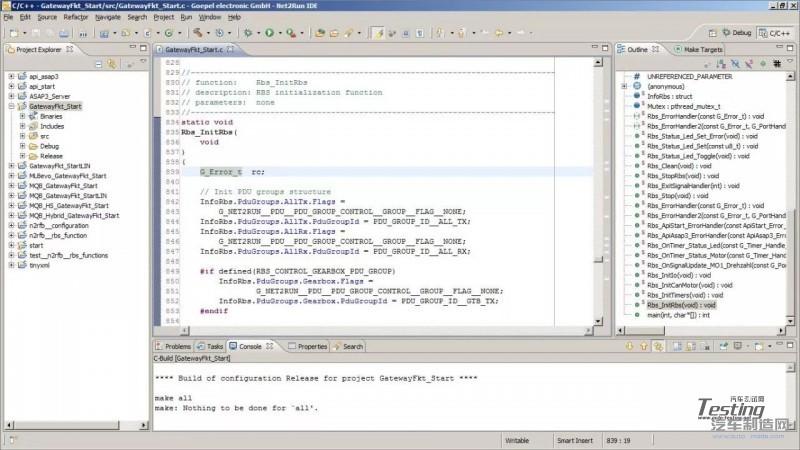
图3:Net2RunIDE(代码窗口)
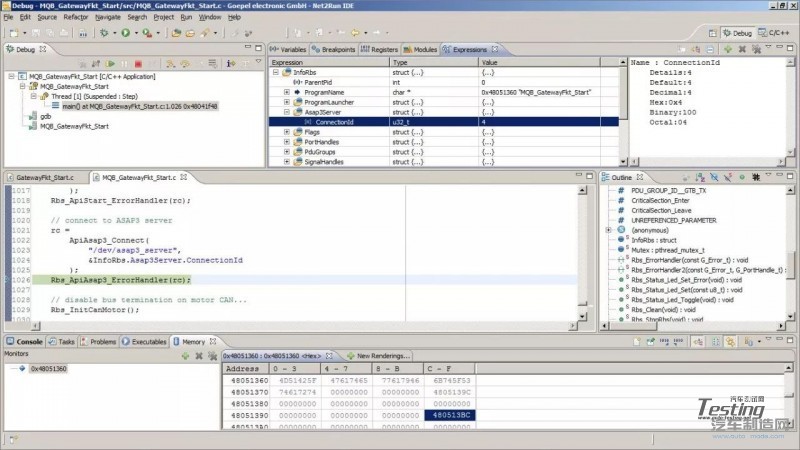
图4:Net2RunConfigurator
RBS程序被设计为可以与各种RBS文件一起运行。对于不同的被测单元和总线系统,都有与之对应的适合的RBS程序。CAN、FlexRay的控制单元与由LIN子总线控制的动力传动单元的辅助组件之间是有区别的,汽油、柴油和混合动力发动机之间在功能上也有区别,这导致了RBS程序和RBS文件的多种可能的组合。它们被分组为RBS项目并定义在一个XML文件中。在此文件中,RBS项目启动期间自动加载的RBS项目也需要被定义。为此,RBS盒中有一个名为Program-Launcher的小型启动程序,它在RBS盒启动时运行,以确保选定的RBS程序和其关联的RBS文件被启动。除此之外,用户还可远程控制启动程序。一方面,可以通过CAN总线改变残余总线仿真;另一方面,也可通过在PC上运行的GOEPEL工具“RBS-Selector”完成。RBS程序使用FIFO缓冲区将当前状态和错误消息发送到PC,并可通过“板载监视工具”显示。
用于测试序列控制的实验室自动化系统
为了控制测试序列并记录测量值,大众使用了他们的实验室自动化系统试验台“VENUS”,其通过CAN协议进行通信。自动化系统通过RBS盒的网关发送所需的参数和参考变量,这些参数和参考变量通过使用CAN总线影响残余总线仿真的动态部分。所以,无论是LIN控制的辅助单元,还是FlexRay控制单元都可通过CAN远程控制。单个总线的测量值可以通过网关发送到“VENUS”,并得到评估。除了实验室试验台,大众也使用外部服务供应商提供的其他自动化系统测试平台,大多数情况下可以很容易实现CAN连接。
除CAN通信外,大众汽车和GOEPEL电子还联合开发了RBS盒的ASAP3服务器。它作为一个服务器在RBS盒上运行,并且能轻松访问残余总线仿真信号。ASAP3是用于在控制单元软件中进行校准和记录测量值的ASAM专用协议。众多知名供应商的校准工具和测试台自动化系统以及实验室软件VENUS均支持ASAP3标准。ASAP3客户端通过千兆以太网链路连接到ASAP3服务器,然后通过访问残余总线模拟的Tx信号作为参数;Rx信号被认为是测量值。ASAP3客户端可以从A2L文件中学习哪些参数或测量值在RBS中可用。因此,Net2Run为1.51版本和1.60版本集成了一个标准A2L文件导出功能,它将列表中的所有信号分别作为参数(Tx)和测量值(Rx)导出。ASAP3服务器使用GOEPELAPI访问信号。该配置在XML配置文件中定义,可由TinyXml解析器读入。通过程序启动器的API,用户可以切换到使用ASAP3服务器运行另一个残余总线仿真。以太网通信基于QNX操作系统下与POSIX兼容的对接I/O库。
图1:德国大众集团集成测试平台
需求
新的残余总线仿真解决方案要求不仅可以支持CAN总线,还要支持LIN/FlexRay。同时,还需具备模拟和数字I/O作为一个完整的工具链,用户可自己集成代码和功能模块。同时,“参数配置取代编程”的设计理念也是首要的。残余总线仿真的变量部分,应通过使用标准工具进行配置和参数化来实现创建和调整。
在大众集团的正式筛选过程中,分别对多家供应商的现有产品的运转周期和性能进行了测试。GOEPEL的stand-alone box产品及以Ethernet接口连接的自动化系统测试平台解决方案以其能独立于自动化系统(AuSy)运行的能力,最终脱颖而出。将其安装在靠近测试对象的位置,可以减少所需电缆的长度,降低布线工作量。
单一来源的软硬件
该方案最终选择了使用GOEPEL的61系列Controller—basicCAN61plus模块。该款产品提供3个CAN总线端口(2 x motor CAN, 1 x AuSy CAN),1个LIN接口(附属),2个FlexRay接口,6路模拟和8路数字I/O作为选配。此外,该产品还配有强大的600 MHz PowerPC CPU,用于运行残余总线仿真,并具备千兆以太网接口和USB 2.0接口,以及集成1个“terminal 15”的继电器。
图2:GOEPELRBS产品(basicCAN61PLUS)
除此之外,德国大众还使用了GOEPEL的Net2Run软件包来创建编写残余总线仿真程序。该软件可以使用户在几分钟内创建一个可执行的静态残余总线仿真序列。所需信息将通过车载网络数据库导入,如:DBC-,LDF-或FIBEX-数据库,同时选择需要仿真的控制单元及其对应的报文信息。校验和计算、报文计数器以及所需的LIN和FlexRay发送时间序列都是自动配置的。同样,PDU多路复用器的整个PDU触发和FlexRay更新位的处理也是如此。最后,用户只需要选择配置那些在运行时能够在RBS程序中访问的信号,之后生成的RBS文件将存储在RBSbox中。RBS程序将加载并运行此文件。或者,残余总线仿真可以直接通过Net2Run软件内部启动。
残余总线仿真—一种模块化的方法
为了通过AuSyCAN端口控制残余总线仿真,GOEPEL的RBSbox必须配置为网关,其具体可通过Net2Run中的网关编辑器来完成。需要发送的信号映射到路由表中,如果适用,则添加附加缩放比例参数或偏移量。这些信息也将存储于RBS文件中。
为了独立于任何PC或AuSy运行,RBS盒还需要RBS程序(用户代码)。它是一个小型的C或C ++程序,使用GOEPELAPI函数来访问GOEPEL电子硬件及其各个固件功能。大众使用了可切换版本的RBS程序,例如:手动或自动变速箱。一个简单的RBS程序可使所有的接口初始化,并根据需要激活/抑制终端电阻,然后再加载RBS文件并开始残余总线仿真。一旦识别到来自发动机控制单元的有效报文信息,RBS程序就会启动残余总线仿真的Tx-PDU组,并在发动机不再发送任何报文信息时相应地停止它们。除外,RBS程序既可以控制模拟和数字I/O,也可以包含用于动态残余总线仿真的信号基础模型或功能。这些功能可以在程序库中组合起来,以便在不同的RBS程序中重复利用。
大众依靠GOEPEL电子的Net2Run-ID作为创建车载RBS程序的工具。这个根据开发环境的编译器包含RBS盒创建和调试C及C ++程序的所有必要组件。RSB盒中的程序在QNX实时操作系统下运行。所有残余总线仿真所需的功能都包含在GOEPEL API中,其也可以在Windows下使用。除了标准的C库之外,用户还可以从众多的兼容POSIX的QNX库中受益。
图3:Net2RunIDE(代码窗口)
图4:Net2RunConfigurator
RBS程序被设计为可以与各种RBS文件一起运行。对于不同的被测单元和总线系统,都有与之对应的适合的RBS程序。CAN、FlexRay的控制单元与由LIN子总线控制的动力传动单元的辅助组件之间是有区别的,汽油、柴油和混合动力发动机之间在功能上也有区别,这导致了RBS程序和RBS文件的多种可能的组合。它们被分组为RBS项目并定义在一个XML文件中。在此文件中,RBS项目启动期间自动加载的RBS项目也需要被定义。为此,RBS盒中有一个名为Program-Launcher的小型启动程序,它在RBS盒启动时运行,以确保选定的RBS程序和其关联的RBS文件被启动。除此之外,用户还可远程控制启动程序。一方面,可以通过CAN总线改变残余总线仿真;另一方面,也可通过在PC上运行的GOEPEL工具“RBS-Selector”完成。RBS程序使用FIFO缓冲区将当前状态和错误消息发送到PC,并可通过“板载监视工具”显示。
用于测试序列控制的实验室自动化系统
为了控制测试序列并记录测量值,大众使用了他们的实验室自动化系统试验台“VENUS”,其通过CAN协议进行通信。自动化系统通过RBS盒的网关发送所需的参数和参考变量,这些参数和参考变量通过使用CAN总线影响残余总线仿真的动态部分。所以,无论是LIN控制的辅助单元,还是FlexRay控制单元都可通过CAN远程控制。单个总线的测量值可以通过网关发送到“VENUS”,并得到评估。除了实验室试验台,大众也使用外部服务供应商提供的其他自动化系统测试平台,大多数情况下可以很容易实现CAN连接。
除CAN通信外,大众汽车和GOEPEL电子还联合开发了RBS盒的ASAP3服务器。它作为一个服务器在RBS盒上运行,并且能轻松访问残余总线仿真信号。ASAP3是用于在控制单元软件中进行校准和记录测量值的ASAM专用协议。众多知名供应商的校准工具和测试台自动化系统以及实验室软件VENUS均支持ASAP3标准。ASAP3客户端通过千兆以太网链路连接到ASAP3服务器,然后通过访问残余总线模拟的Tx信号作为参数;Rx信号被认为是测量值。ASAP3客户端可以从A2L文件中学习哪些参数或测量值在RBS中可用。因此,Net2Run为1.51版本和1.60版本集成了一个标准A2L文件导出功能,它将列表中的所有信号分别作为参数(Tx)和测量值(Rx)导出。ASAP3服务器使用GOEPELAPI访问信号。该配置在XML配置文件中定义,可由TinyXml解析器读入。通过程序启动器的API,用户可以切换到使用ASAP3服务器运行另一个残余总线仿真。以太网通信基于QNX操作系统下与POSIX兼容的对接I/O库。







最新资讯
-
欧洲欲禁碳纤维
2025-04-16 15:47
-
模糊测试究竟在干什么
2025-04-16 15:23
-
越野车辆动力学 —— 越野车辆的平顺性
2025-04-16 14:50
-
Euro 7排放:欧盟委员会匆忙发布轻型车的实
2025-04-16 13:29
-
Applus+ IDIADA宣布采用全频谱碳纤维座舱用
2025-04-16 13:27
