




 广告
广告





















































为何L5自动驾驶必须是星基增强系统定位?
2018-03-16 09:35:19· 来源:佐思汽车研究 作者:佐思产研周彦武

目前只在城区或高速公路行驶的L4,无论是Waymo还是百度,都必须使用先验(Prior)激光雷达地图才可实现厘米级定位,但先验(Prior)激光雷达地图限制了L4的行驶区域,通常只能覆盖主城区或高速公路。
目前只在城区或高速公路行驶的L4,无论是Waymo还是百度,都必须使用先验(Prior)激光雷达地图才可实现厘米级定位,但先验(Prior)激光雷达地图限制了L4的行驶区域,通常只能覆盖主城区或高速公路。自动驾驶要想抛弃先验激光雷达地图或其他先验信息来实现厘米级定位,进而达到真正的全自动驾驶,也就是L5阶段,必须用星基增强系统定位。
L4阶段的厘米级定位是依靠先验信息的相对定位,全自动驾驶则应该无需任何先验信息支持,绝对定位(单点定位)达到厘米级。要实现厘米级的绝对定位,星基增强系统是必须的。因为只有星基增强系统是单工通讯,这就意味着其带宽无限大,即便是有几十亿用户也不会发生网络阻塞,也不会信息延迟。
传统的GPS定位精度只有3-7米,在城市道路或峡谷中,精度会进一步下降。RTK GPS只能用于无人驾驶的Demo,无法大规模推广。即便是美国及北约国家,民用系统也不可能用GPS获得亚米级定位。GPS卫星广播的信号包括三种信号分量:载波、测距码和数据码。测距码又分为P码(精码)和C/A码,通常也会把C/A码叫做民码,P码叫军码。P码会再分为明码和W码,想要破解是完全不可能的。后来在新一代GPS上老美又提出了专门的M(Military)码,具体细节仍处于高度保密中,只知道速率为5.115 MHz,码长未知。
指望GPS是不可能的了,只有CORS,基本上可以把CORS看成地基增强系统。CORS(Continuous Operation Reference Stations)即连续运行参考站系统,为一个或若干个固定的、连续运行的GPS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GPS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GPS服务项目的系统。CORS分单基站、多基站和网络CORS三大类。大规模使用自然需要网络CORS。网络CORS主流技术有四种,分别是VRS、主辅站技术(i-MAX)、区域改正参数(FKP)技术和综合误差内插法技术。其中VRS技术市场占有率最高,是目前公认的主流,VRS由天宝公司发明,早在2004年7月,四川省地震局就搭建了VRS网络,而在2005年11月,天宝正式将VRS引进中国,中国目前的CORS都是基于VRS技术。这其中包括了从2006年全国各省测绘系统和北斗地基增强系统。南方公司则对VRS进行了改进,命名为NRS,本质上还是VRS。
VRS是虚拟参考站(Virtual Reference Station)的简称。这项技术是CORS应用的一种,数据处理中心24小时连续不断地根据各基准站所采集的实时观测数据在区域内进行整体建模解算,通过建立精确的误差模型(如电离层、对流层、卫星轨道等误差模型),在移动站附近产生一个物理上并不存在的虚拟参考站(VRS),由于虚拟参考站的位置是通过流动站接收机(可以是手机,需要装一个App,或者直接用魔盒)的单点定位解来确定,故其与移动站构成的基线通常只有几米到十几米,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK。
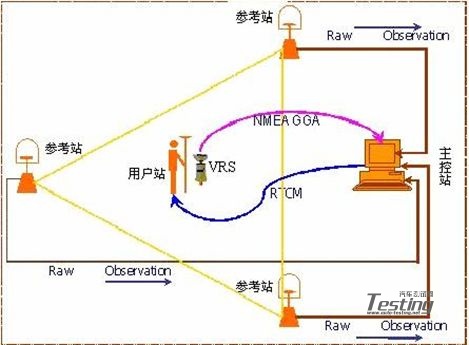
CORS-VRS示意图
VRS最突出优势是覆盖范围更广:VRS网络中固定参考站的距离增大,站间距离可达到70KM,三个站覆盖的面积可以达到2100多平方公里,以北京为例,城区面积为900多平方公里,三个参考站即可覆盖,北京市面积1.68万平方公里,十个参考站即可覆盖。
但是VRS的缺陷也是很明显的:
(1)采用双向通信,限制了它的同时在线用户数量。
(2)虚拟参考基站随着用户(流动站)的移动(超过一定距离)要重新初始化,并且是不可追踪、不可重复的虚拟的参考基站。
(3)人为的规定了一个参考站站网中参考站的数量,一般情况下为三个。它们是由参考站软件所决定的,用于计算流动站所需要的改正数。此项约束限制了系统采用合适数量的参考站解决占主导地位的大气条件,例如建立大尺度气象活动的模型问题。这种约束也影响到成果的稳定性,并表现出对网络的几何形态及对数据的传输损耗十分敏感。如果三个站中有一个站不能为这个网络提供数据,那么网络软件必须搜索另外一个合适的参考站,并为用户重新安排改正计算。在搜索过程中,没有网络改正数可以提供给流动站用户,需要长时间等待。
(4)其播发的数据格式不标准,偏向某一类型的接收机。毕竟天宝还是希望你买它的接收机。
(5)需要通信网络(一般是蜂窝网络)支持,没信号的地方或信号差的地方,无法使用。最致命的是,蜂窝通讯是有延迟的,不仅有通信的延迟还有矫正信息的延迟,总的延迟时间大约在200毫秒到数秒之间。对于每小时速度为72公里的汽车来说,每秒行驶距离为20米,那么100毫秒的延迟就是2米的距离,300毫秒就是6米。蜂窝通讯的延迟与用户数量成正比,如果某区域突然大量增加用户,延迟达几秒甚至无法连通也是有可能的。而星基增强系统如下面所要说的QZSS ,一个定位周期是4毫秒,刷新频率是250Hz,对于每小时速度为72公里的汽车来说,4毫秒就是8厘米。比地基增强要强太多了。即便是5G时代也难以缩到100毫秒以下。
要真正解决问题,唯有星基增强系统,目前最常见的有两种,一种是日本的QZSS,另一种是天宝的RTX。两者的原理非常近似,因此我们主要分析QZSS(准天顶卫星)系统。
早在1972 年,当时的日本电波研究所(现为信息与通信研究所) 就提出了准天顶卫星系统的概念,论证了这种系统很适合日本这样地处中纬度、国土狭小的国家;1997 年,日本政府发表报告,要求对建立卫星导航定位系统中的三项基本技术进行自主研发,即星载原子钟的研制、系统时间的管理和卫星的精密定轨。2000年6月,日本联合邮政省向日本宇宙开发委员会提交了份题为改进日本航天开发体制,扩展航天利用新领域的报告。提出了研制和发射国际互联网卫星的建议。日本宇宙航空研究开发机构(JAXA)经过调查指出QZSS具有非常高的经济价值和社会价值,并且JAXA当时就已经考虑到了无人驾驶。2002年11月1日正式成立了新卫星商业公司AdvancedSpace Business Corporation (ASBC),共有43家企业出资,三菱电机公司、日立制作所和丰田汽车公司等7家企业持股占77%。但是事情并不顺利,最后还是由日本政府内务省出面接管QZSS项目。日本政府接管后,在2010年9月11日,发射第一颗卫星Michibiki,2011年6月1日,正式提供导航服务。2017年6月日,发射第二颗卫星,2017年8月10日,发射第三颗卫星,2017年10月10日,发射第四颗卫星。
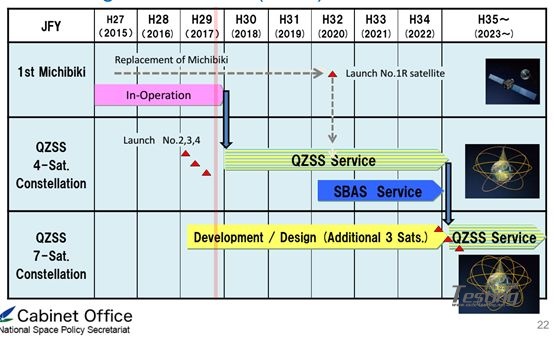
按照日本的计划,预计在2018年11月1日正式投入商业化运营。在2022年前再发射3颗卫星,保证日本上空任意时刻都有两颗超过70度仰角的卫星。 北斗(二代)目前只发射了14颗卫星,其中5颗是GEO,也就是地球同步轨道卫星,在地球赤道上空,在北半球这5颗GEO都是在南边的天空上,而且卫星仰角不高都是四五十度,所以,如果南边被挡住的话,收星情况会很差,这也导致了目前北斗定位的稳定性和连续性并不如GPS。当然北斗也有一些优点,比如GEO的电文速率要高于GPS,因此收齐一套完整星历的时间要比GPS快,因此首次定位时间要比GPS快。总体上北斗和GPS相当类似,单点定位精度都在10m以内。 如果仰角不超过48度,卫星发出的信号由于受地面高层建筑物的遮挡,实际只能覆盖城市面积的30%,不仅覆盖面积小,且定位精度也低。而“准天顶卫星”的仰角在70度(东京地区达85度),覆盖率可达100%。
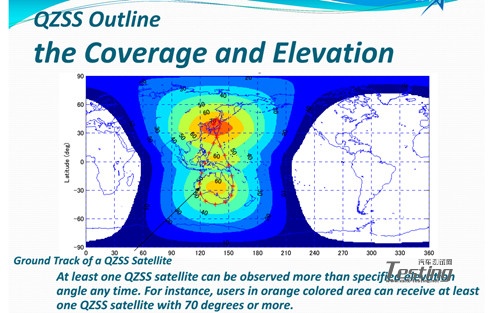
上图为QZSS 仰角覆盖
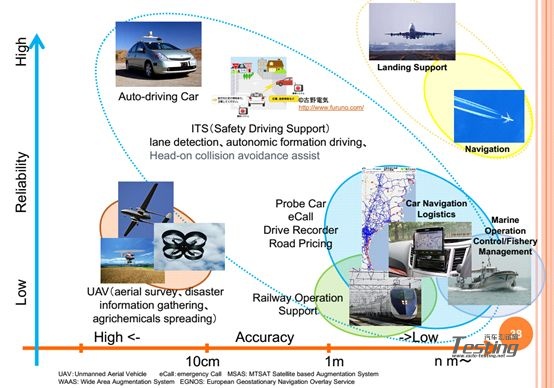
除了用在无人驾驶,QZSS的服务范围很广。
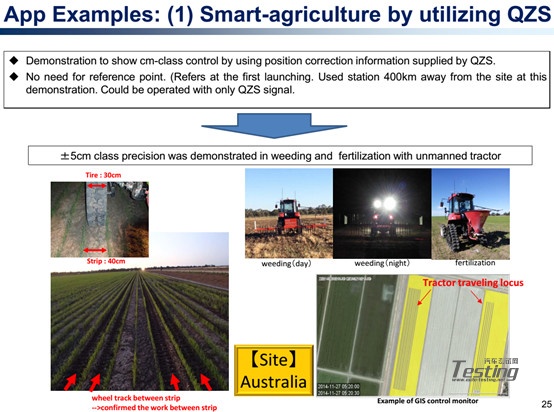
2011年6月1日,第一颗卫星提供服务后,日本已经实现无人拖拉机的农业作业,无需基准站,也无需蜂窝网络。某种意义上讲,日本是全球第一个无人驾驶实用化的国家,远远领先于Waymo。

由于QZSS也覆盖了澳洲大部分土地,日本与澳洲合作非常紧密,日本向澳洲输出了很多无人农业技术,因此澳洲的无人农业也在2017年底得以实现,在澳洲荒无人烟的西南部和东北部实现了无人农业。当然日本人也赚了不少澳洲人的钱。
不仅如此,日本的QZSS技术可以完全移植到欧洲的伽利略系统上,欧洲目前已经与三菱、NEC和日立展开合作,为欧洲也打造一套QZSS系统。
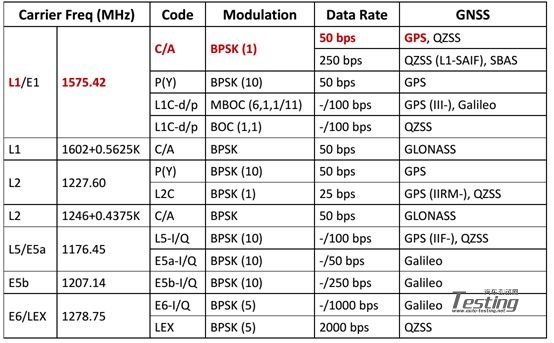
上表为为主要的GNSS系统码率和信道
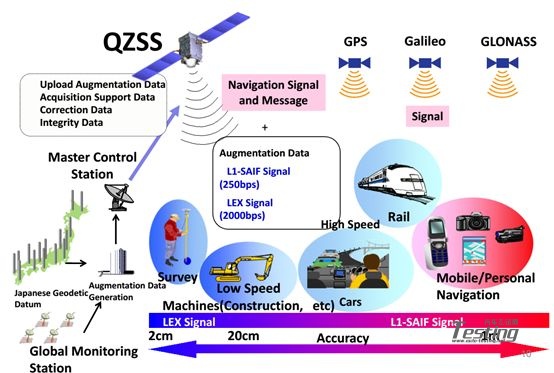
QZSS之所以能实现高精度定位,主要来自两个信道的增强,一个是L1-SAIF,另一个是LEX。
L1-SAIF可以达到亚米级精度,一般来说,最高38厘米。LEX可以达到2厘米精度。
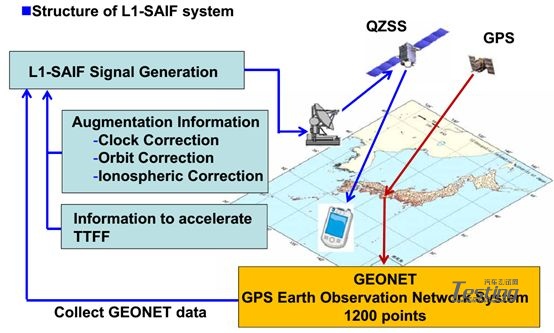
L1-SAIF不仅包含时钟矫正、轨道矫正、电离层矫正,还包括有首次定位加速,同时还有日本本土大约1200个GPS地面观测站网络点的GEONET数据。
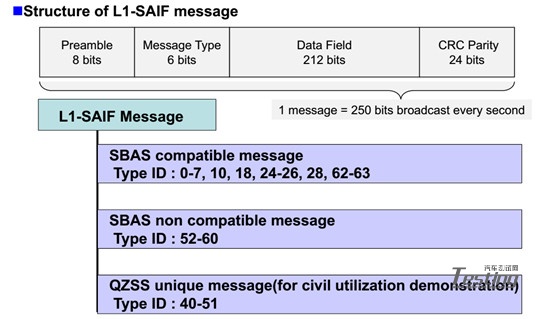
上图为L1-SAIF的信息结构,码率为250bps
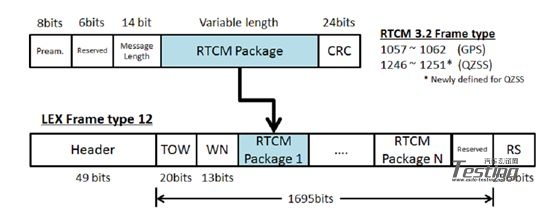
上图为QZSS的LEX信息格式,数据为1695字节,包头为49字节,包尾为256字节的里德所罗门校验纠错码。
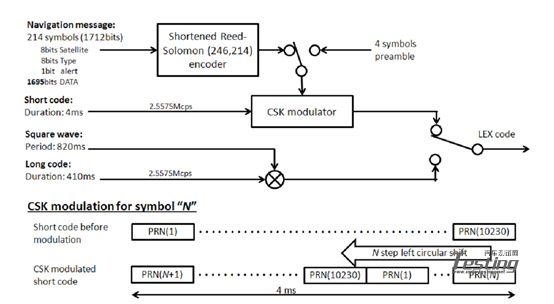
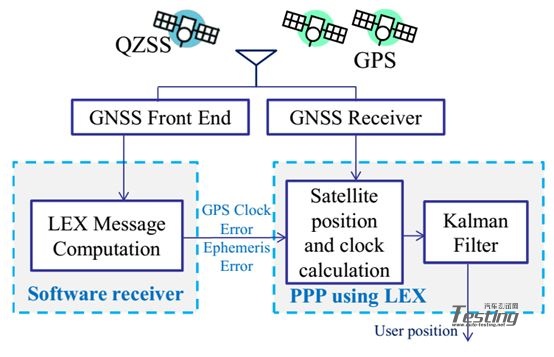
上图为LEX的信号调制,short code的时间只有4毫秒,平方波则比较长,有820毫秒。LEX需要特殊的接收机,目前的GPS接收机可以接收到QZSS信号,但无法解调出LEX信息。不过只需要在软件上做改动,即可实现这个功能。
因此,日本将是全球第一个能实现L5级自动驾驶的国家。
L4阶段的厘米级定位是依靠先验信息的相对定位,全自动驾驶则应该无需任何先验信息支持,绝对定位(单点定位)达到厘米级。要实现厘米级的绝对定位,星基增强系统是必须的。因为只有星基增强系统是单工通讯,这就意味着其带宽无限大,即便是有几十亿用户也不会发生网络阻塞,也不会信息延迟。
传统的GPS定位精度只有3-7米,在城市道路或峡谷中,精度会进一步下降。RTK GPS只能用于无人驾驶的Demo,无法大规模推广。即便是美国及北约国家,民用系统也不可能用GPS获得亚米级定位。GPS卫星广播的信号包括三种信号分量:载波、测距码和数据码。测距码又分为P码(精码)和C/A码,通常也会把C/A码叫做民码,P码叫军码。P码会再分为明码和W码,想要破解是完全不可能的。后来在新一代GPS上老美又提出了专门的M(Military)码,具体细节仍处于高度保密中,只知道速率为5.115 MHz,码长未知。
指望GPS是不可能的了,只有CORS,基本上可以把CORS看成地基增强系统。CORS(Continuous Operation Reference Stations)即连续运行参考站系统,为一个或若干个固定的、连续运行的GPS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GPS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GPS服务项目的系统。CORS分单基站、多基站和网络CORS三大类。大规模使用自然需要网络CORS。网络CORS主流技术有四种,分别是VRS、主辅站技术(i-MAX)、区域改正参数(FKP)技术和综合误差内插法技术。其中VRS技术市场占有率最高,是目前公认的主流,VRS由天宝公司发明,早在2004年7月,四川省地震局就搭建了VRS网络,而在2005年11月,天宝正式将VRS引进中国,中国目前的CORS都是基于VRS技术。这其中包括了从2006年全国各省测绘系统和北斗地基增强系统。南方公司则对VRS进行了改进,命名为NRS,本质上还是VRS。
VRS是虚拟参考站(Virtual Reference Station)的简称。这项技术是CORS应用的一种,数据处理中心24小时连续不断地根据各基准站所采集的实时观测数据在区域内进行整体建模解算,通过建立精确的误差模型(如电离层、对流层、卫星轨道等误差模型),在移动站附近产生一个物理上并不存在的虚拟参考站(VRS),由于虚拟参考站的位置是通过流动站接收机(可以是手机,需要装一个App,或者直接用魔盒)的单点定位解来确定,故其与移动站构成的基线通常只有几米到十几米,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK。
CORS-VRS示意图
VRS最突出优势是覆盖范围更广:VRS网络中固定参考站的距离增大,站间距离可达到70KM,三个站覆盖的面积可以达到2100多平方公里,以北京为例,城区面积为900多平方公里,三个参考站即可覆盖,北京市面积1.68万平方公里,十个参考站即可覆盖。
但是VRS的缺陷也是很明显的:
(1)采用双向通信,限制了它的同时在线用户数量。
(2)虚拟参考基站随着用户(流动站)的移动(超过一定距离)要重新初始化,并且是不可追踪、不可重复的虚拟的参考基站。
(3)人为的规定了一个参考站站网中参考站的数量,一般情况下为三个。它们是由参考站软件所决定的,用于计算流动站所需要的改正数。此项约束限制了系统采用合适数量的参考站解决占主导地位的大气条件,例如建立大尺度气象活动的模型问题。这种约束也影响到成果的稳定性,并表现出对网络的几何形态及对数据的传输损耗十分敏感。如果三个站中有一个站不能为这个网络提供数据,那么网络软件必须搜索另外一个合适的参考站,并为用户重新安排改正计算。在搜索过程中,没有网络改正数可以提供给流动站用户,需要长时间等待。
(4)其播发的数据格式不标准,偏向某一类型的接收机。毕竟天宝还是希望你买它的接收机。
(5)需要通信网络(一般是蜂窝网络)支持,没信号的地方或信号差的地方,无法使用。最致命的是,蜂窝通讯是有延迟的,不仅有通信的延迟还有矫正信息的延迟,总的延迟时间大约在200毫秒到数秒之间。对于每小时速度为72公里的汽车来说,每秒行驶距离为20米,那么100毫秒的延迟就是2米的距离,300毫秒就是6米。蜂窝通讯的延迟与用户数量成正比,如果某区域突然大量增加用户,延迟达几秒甚至无法连通也是有可能的。而星基增强系统如下面所要说的QZSS ,一个定位周期是4毫秒,刷新频率是250Hz,对于每小时速度为72公里的汽车来说,4毫秒就是8厘米。比地基增强要强太多了。即便是5G时代也难以缩到100毫秒以下。
要真正解决问题,唯有星基增强系统,目前最常见的有两种,一种是日本的QZSS,另一种是天宝的RTX。两者的原理非常近似,因此我们主要分析QZSS(准天顶卫星)系统。
早在1972 年,当时的日本电波研究所(现为信息与通信研究所) 就提出了准天顶卫星系统的概念,论证了这种系统很适合日本这样地处中纬度、国土狭小的国家;1997 年,日本政府发表报告,要求对建立卫星导航定位系统中的三项基本技术进行自主研发,即星载原子钟的研制、系统时间的管理和卫星的精密定轨。2000年6月,日本联合邮政省向日本宇宙开发委员会提交了份题为改进日本航天开发体制,扩展航天利用新领域的报告。提出了研制和发射国际互联网卫星的建议。日本宇宙航空研究开发机构(JAXA)经过调查指出QZSS具有非常高的经济价值和社会价值,并且JAXA当时就已经考虑到了无人驾驶。2002年11月1日正式成立了新卫星商业公司AdvancedSpace Business Corporation (ASBC),共有43家企业出资,三菱电机公司、日立制作所和丰田汽车公司等7家企业持股占77%。但是事情并不顺利,最后还是由日本政府内务省出面接管QZSS项目。日本政府接管后,在2010年9月11日,发射第一颗卫星Michibiki,2011年6月1日,正式提供导航服务。2017年6月日,发射第二颗卫星,2017年8月10日,发射第三颗卫星,2017年10月10日,发射第四颗卫星。
按照日本的计划,预计在2018年11月1日正式投入商业化运营。在2022年前再发射3颗卫星,保证日本上空任意时刻都有两颗超过70度仰角的卫星。 北斗(二代)目前只发射了14颗卫星,其中5颗是GEO,也就是地球同步轨道卫星,在地球赤道上空,在北半球这5颗GEO都是在南边的天空上,而且卫星仰角不高都是四五十度,所以,如果南边被挡住的话,收星情况会很差,这也导致了目前北斗定位的稳定性和连续性并不如GPS。当然北斗也有一些优点,比如GEO的电文速率要高于GPS,因此收齐一套完整星历的时间要比GPS快,因此首次定位时间要比GPS快。总体上北斗和GPS相当类似,单点定位精度都在10m以内。 如果仰角不超过48度,卫星发出的信号由于受地面高层建筑物的遮挡,实际只能覆盖城市面积的30%,不仅覆盖面积小,且定位精度也低。而“准天顶卫星”的仰角在70度(东京地区达85度),覆盖率可达100%。
上图为QZSS 仰角覆盖
除了用在无人驾驶,QZSS的服务范围很广。
2011年6月1日,第一颗卫星提供服务后,日本已经实现无人拖拉机的农业作业,无需基准站,也无需蜂窝网络。某种意义上讲,日本是全球第一个无人驾驶实用化的国家,远远领先于Waymo。
由于QZSS也覆盖了澳洲大部分土地,日本与澳洲合作非常紧密,日本向澳洲输出了很多无人农业技术,因此澳洲的无人农业也在2017年底得以实现,在澳洲荒无人烟的西南部和东北部实现了无人农业。当然日本人也赚了不少澳洲人的钱。
不仅如此,日本的QZSS技术可以完全移植到欧洲的伽利略系统上,欧洲目前已经与三菱、NEC和日立展开合作,为欧洲也打造一套QZSS系统。
上表为为主要的GNSS系统码率和信道
QZSS之所以能实现高精度定位,主要来自两个信道的增强,一个是L1-SAIF,另一个是LEX。
L1-SAIF可以达到亚米级精度,一般来说,最高38厘米。LEX可以达到2厘米精度。
L1-SAIF不仅包含时钟矫正、轨道矫正、电离层矫正,还包括有首次定位加速,同时还有日本本土大约1200个GPS地面观测站网络点的GEONET数据。
上图为L1-SAIF的信息结构,码率为250bps
上图为QZSS的LEX信息格式,数据为1695字节,包头为49字节,包尾为256字节的里德所罗门校验纠错码。
上图为LEX的信号调制,short code的时间只有4毫秒,平方波则比较长,有820毫秒。LEX需要特殊的接收机,目前的GPS接收机可以接收到QZSS信号,但无法解调出LEX信息。不过只需要在软件上做改动,即可实现这个功能。
因此,日本将是全球第一个能实现L5级自动驾驶的国家。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
