




 广告
广告





















































模态空间—锤击试验的测量带宽是否应与关心频带一致?
2018-04-02 23:20:44· 来源:德国M十P国际公司北京代表处

锤击试验中的测量带宽应该与感兴趣的频率带宽一致吗?我们来探讨一下为何不需要一致。
锤击试验中的测量带宽应该与感兴趣的频率带宽一致吗?
我们来探讨一下为何不需要一致。
作者:Peter Avitabile
翻译:德国M+P国际公司北京代表处
这个问题表面上看起来好像很简单。但是随着我们的讨论,你可能会意识到,一些其它因素会让你重新看待这个问题。表面上看试验的测量结果应该覆盖感兴趣的频响范围。
显然,如果带宽较窄,可能就会观察不到感兴趣的高阶模态;如果带宽太宽,则高阶模态响应可能不在感兴趣区域。现在的问题在于,后面这种情况是不合适的吗?或者可以选择更宽的频率范围得到同样或更好的测量结果吗?下最终结论之前,我们还需要对这个问题进行更多的讨论和评估。
我们先在一个典型结构上进行简单测量,该结构仅有前2阶或前3阶模态是我们感兴趣的,预测前3阶模态位于800Hz带宽范围内,在800Hz带宽范围内的典型测量结果如图1所示,有800条谱线。
总体来看测量结果令人十分满意,频响函数很好地展示出了期望的峰,由此测量结果也可以接受。输入谱在所有频率上都相当平坦,整个频率范围内大约有20dB的衰减,在感兴趣的大部分频率上的相干也很好。(尽管在图上不容易看出,实际上在频率范围内,甚至在共振频率上,相干也仅有稍许降落,而共振频率上相干的下降对于多数工程师而言是可以接受的。)
所以这个测量结果可能存在什么问题呢?我们来看一下与系统响应相关的时域信号。
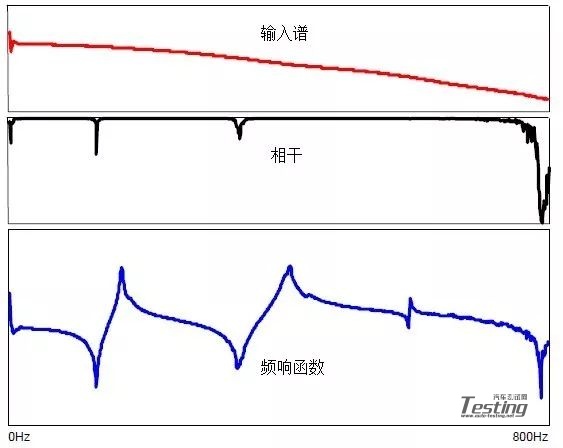
图1 800Hz带宽范围内的输入谱,相干和频率响应函数

图2 800Hz带宽范围内时域响应输出
从图2中可以看到时域响应在记录时间的1/4内很快地衰减。
那这是存在的问题吗?表面上看不是。但我真正想问的是,可以得到更好的测量结果吗?应该怎么测量得到?
观察图2中的时域响应,响应通道上的任何噪声极有可能对测得的频响函数影响很大。(本例中并没有任何明显的噪声,但如果噪声存在,频响函数会和相干一样降低很多。)
假定在不同频率带宽进行测量。在这次测量中,我们尽量要求时域响应在大部分记录时间内或所采集的数据块内均是主要信号,如果频率带宽增大至4倍,记录时间就会缩减为原来的1/4。测得的信号如图3所示,可看出时域响应占据了大部分的记录时间。
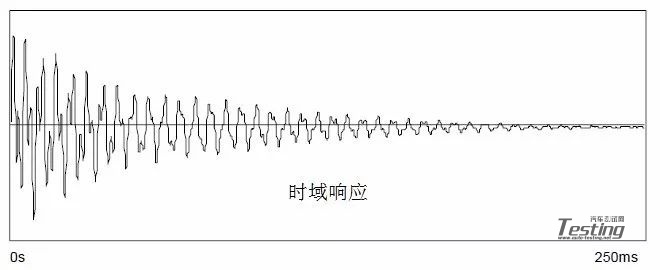
图3 3200Hz带宽范围内时域响应输出
如图4所示,我们考察相应的输入谱、相干和频率响应函数:
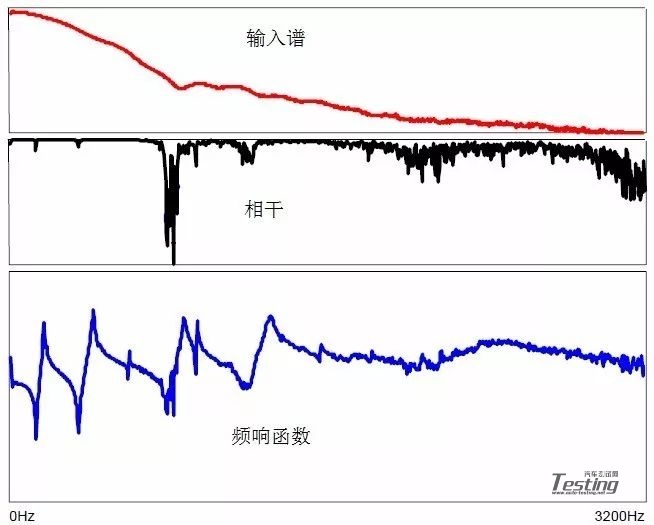
图4 3200Hz带宽范围内的输入谱、相干和频率响应函数
乍看之下,这个测量结果在整个频率范围内看上去并不好。但在感兴趣的前几阶模态的频率范围内,测量结果实际上相当理想。(同样,尽管图上很难看出,但相干实际上与图2中一样。)
所以从根本上来说,由测得响应的相干可知实际上第2次测量结果更好。这次测量的诀窍是力锤锤头仅用来激起我们感兴趣的频率范围——而不是FFT分析仪的整个带宽。这样,我们就可以得到感兴趣模态的较好的测量结果。
我曾多次在不同测量情况下遇到过这类问题,人们不太理解为什么这个测量结果更让人能够接受,经过以上讨论可知,在这种情况下总体测量结果比窄带测量更好。
有一个范例是几年前在一个航空结构监视舱上测得的结果,因为记录时间内响应衰减很快,初始测量结果在特定的窄带范围内产生了严重噪声。选择更宽的频率范围,响应信号在整个时域记录时间内都较大,也就得到了感兴趣模态的更好的测量结果,同时力锤锤头仅激起感兴趣的模态,而没有激发FFT分析过程的整个频率范围。图5展示了该结构上的典型测量结果。(遗憾的是,没有窄带的FRF测量结果可供比较,但总体上比整个频率范围内要差很多。)
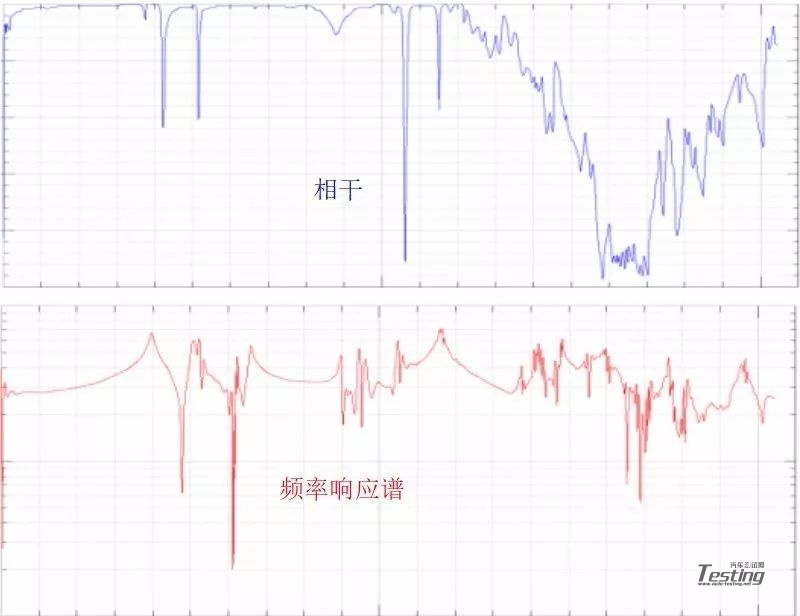
图5 POD测量结果的FRF/相干
我希望这篇文章有助于寻找改善测量结果的替代方法。不论哪种情况,在进行测量之前,我们都需要判断哪种测量方案在总体情况上为最优。如果你有关于模态分析的任何其它问题,欢迎垂询。
我们来探讨一下为何不需要一致。
作者:Peter Avitabile
翻译:德国M+P国际公司北京代表处
这个问题表面上看起来好像很简单。但是随着我们的讨论,你可能会意识到,一些其它因素会让你重新看待这个问题。表面上看试验的测量结果应该覆盖感兴趣的频响范围。
显然,如果带宽较窄,可能就会观察不到感兴趣的高阶模态;如果带宽太宽,则高阶模态响应可能不在感兴趣区域。现在的问题在于,后面这种情况是不合适的吗?或者可以选择更宽的频率范围得到同样或更好的测量结果吗?下最终结论之前,我们还需要对这个问题进行更多的讨论和评估。
我们先在一个典型结构上进行简单测量,该结构仅有前2阶或前3阶模态是我们感兴趣的,预测前3阶模态位于800Hz带宽范围内,在800Hz带宽范围内的典型测量结果如图1所示,有800条谱线。
总体来看测量结果令人十分满意,频响函数很好地展示出了期望的峰,由此测量结果也可以接受。输入谱在所有频率上都相当平坦,整个频率范围内大约有20dB的衰减,在感兴趣的大部分频率上的相干也很好。(尽管在图上不容易看出,实际上在频率范围内,甚至在共振频率上,相干也仅有稍许降落,而共振频率上相干的下降对于多数工程师而言是可以接受的。)
所以这个测量结果可能存在什么问题呢?我们来看一下与系统响应相关的时域信号。
图1 800Hz带宽范围内的输入谱,相干和频率响应函数
图2 800Hz带宽范围内时域响应输出
从图2中可以看到时域响应在记录时间的1/4内很快地衰减。
那这是存在的问题吗?表面上看不是。但我真正想问的是,可以得到更好的测量结果吗?应该怎么测量得到?
观察图2中的时域响应,响应通道上的任何噪声极有可能对测得的频响函数影响很大。(本例中并没有任何明显的噪声,但如果噪声存在,频响函数会和相干一样降低很多。)
假定在不同频率带宽进行测量。在这次测量中,我们尽量要求时域响应在大部分记录时间内或所采集的数据块内均是主要信号,如果频率带宽增大至4倍,记录时间就会缩减为原来的1/4。测得的信号如图3所示,可看出时域响应占据了大部分的记录时间。
图3 3200Hz带宽范围内时域响应输出
如图4所示,我们考察相应的输入谱、相干和频率响应函数:
图4 3200Hz带宽范围内的输入谱、相干和频率响应函数
乍看之下,这个测量结果在整个频率范围内看上去并不好。但在感兴趣的前几阶模态的频率范围内,测量结果实际上相当理想。(同样,尽管图上很难看出,但相干实际上与图2中一样。)
所以从根本上来说,由测得响应的相干可知实际上第2次测量结果更好。这次测量的诀窍是力锤锤头仅用来激起我们感兴趣的频率范围——而不是FFT分析仪的整个带宽。这样,我们就可以得到感兴趣模态的较好的测量结果。
我曾多次在不同测量情况下遇到过这类问题,人们不太理解为什么这个测量结果更让人能够接受,经过以上讨论可知,在这种情况下总体测量结果比窄带测量更好。
有一个范例是几年前在一个航空结构监视舱上测得的结果,因为记录时间内响应衰减很快,初始测量结果在特定的窄带范围内产生了严重噪声。选择更宽的频率范围,响应信号在整个时域记录时间内都较大,也就得到了感兴趣模态的更好的测量结果,同时力锤锤头仅激起感兴趣的模态,而没有激发FFT分析过程的整个频率范围。图5展示了该结构上的典型测量结果。(遗憾的是,没有窄带的FRF测量结果可供比较,但总体上比整个频率范围内要差很多。)
图5 POD测量结果的FRF/相干
我希望这篇文章有助于寻找改善测量结果的替代方法。不论哪种情况,在进行测量之前,我们都需要判断哪种测量方案在总体情况上为最优。如果你有关于模态分析的任何其它问题,欢迎垂询。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
