




 广告
广告





















































基于驾驶模拟器的驾驶员特性研究
2018-03-29 15:27:14· 来源:重庆大学汽车工程学院 机械传动国家重点实验室 作者:周孝吉 郑玲

利用视景仿真技术模拟三维世界,构造逼真的仿真模型,模拟逼真的仿真环境,达到近乎真实的仿真效果,可实时获得视觉、听觉、触觉等感官体验。将视景仿真技术应用到智能交通系统,能够为智能交通系统仿真提供真实、生动的交通仿真环境,构建新颖的交通仿真模式。
摘要:深入研究人类驾驶员的驾驶行为和特性,对推动智能汽车向高度自动驾驶的发展,具有重要意义。近年来,利用驾驶模拟器研究驾驶员在复杂交通场景下的驾驶决策和驾驶行为,成为一个重要的研究方向。本文基于虚幻四引擎UE4交互式视景仿真技术,通过车辆、道路、建筑、交通灯、行人、路牌等交通元素的驾驶视景仿真环境搭建,开发了基于CarSim汽车动力学模型和罗技G29力反馈方向盘踏板的具有高拟真度和人机交互的驾驶模拟系统。基于驾驶模拟系统,设计了典型工况下的驾驶模拟试验,通过实时采集采集驾驶员驾驶数据,对驾驶员特性进行了研究。研究结果表明:该驾驶模拟器具有逼真的驾驶体验,利用FCM模糊聚类算法,可以对驾驶员特性进行准确分类,确立驾驶员特性与驾驶能力的关联,为进一步建立基于实时驾驶能力的驾驶权分配研究奠定了基础。
关键词:虚幻4 驾驶模拟器 驾驶员特性 聚类分析 实时驾驶能力
1 引言
利用视景仿真技术模拟三维世界,构造逼真的仿真模型,模拟逼真的仿真环境,达到近乎真实的仿真效果,可实时获得视觉、听觉、触觉等感官体验。将视景仿真技术应用到智能交通系统,能够为智能交通系统仿真提供真实、生动的交通仿真环境,构建新颖的交通仿真模式。针对三维图形渲染引擎的开发,国外游戏软件公司以及几所顶尖学府均投入了大量的人力物力。在这些商业引擎的推动下,三维图形渲染技术得到了迅猛的发展。杨亚联等基于Unity3D软件开发了人在环路的人机交互式视景仿真系统,S. de Groot等利用驾驶模拟器,研究驾驶员驾驶能力和驾驶风格。Epic Game公司3A级三维图形渲染引擎虚幻4(Unreal Engine 简称UE4)具有用户友好的图形界面,完善的功能模块。本文利用UE4设计开发驾驶模拟器,开发的人机交互式驾驶模拟仿真系统通过逼真的交通场景设计,能够准确收集驾驶员在复杂交通场景下的驾驶行为和驾驶能力数据,为驾驶员行为、驾驶员特性以及驾驶能力评估提供科学依据。
2 驾驶模拟器仿真环境和硬件架构
驾驶模拟视景仿真环境包含人、车、路等多个交通元素,是一个十分复杂的、包含各种典型交通场景的庞大系统。为了获得优秀的交互性,逼真的汽车动力学特性,惊艳的场景画面以达到沉浸式的效果,本文基于专业的游戏引擎UE4,结合CarSim汽车动力学仿真模型和罗技G29力反馈方向盘踏板套装,设计开发驾驶模拟器的视景仿真环境和硬件架构,实现优异的用户体验。
2.1 仿真环境模型构建
仿真环境构建需要大量的反映交通元素的三维模型。驾驶仿真环境基于三维制作软件Maya和3Dmax建立三维模型,并用Photoshop制作贴图,再利用V-ray渲染,以增强其视觉体验感。从三维软件导出FBX文件到UE4软件中,定义三维模型的空间位置,使用引擎的地形工具创建地貌,利用种植功能添加植被,使其与地貌相吻合,利用天空球配置环境光源、大气层、雾气等,再利用decal增加场景的细节效果,最后利用GI动态全局光照,实现实时光照动态渲染,构建了无缝连接的城市、山间、小镇和高速公路场景,实现了丰富的仿真场景、真实的光影效果和多变的天气情况。如图1所示是建立的车辆、道路、建筑、交通灯、行人、路牌等交通元素模型,编辑的地形和植被模型,昼夜变化效果等。

图1 仿真环境模型和昼夜天气变化效果
模拟驾驶的交互要真实反馈驾驶员操纵以及驾驶过程中的车辆及驾驶环境信息,模拟驾驶交互设计框架如图2所示。
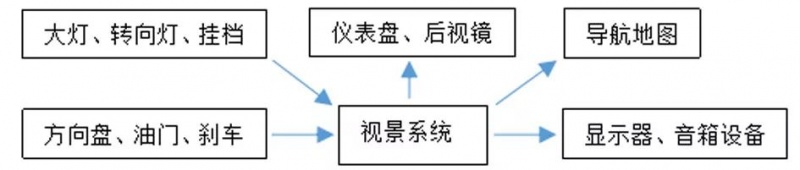
图2 驾驶交互设计框架
驾驶模拟器设计驾驶员视角用于模拟驾驶,模拟实时驾驶景象,反馈后视镜、车速、档位、导航地图等信息,并实现高速运动动态模糊和转弯视觉模拟效果以增强驾驶临场感和速度感,图3是驾驶员视角。

图3 驾驶员视角
2.2 驾驶车辆运动模型构建
虚拟车辆需要具有真实车辆的纵横向运动学特性,本文车辆动力学模型部分采用CarSim软件进行参数化建模,由于CarSim以车辆总成的实际数据为基础,以此建立的整车模型与实际车辆高度一致,确保驾驶模拟器中驾驶员操作的真实与驾驶数据的可靠。
利用CarSim汽车动力学模型和UE4的Vehicle Component结合C++语言编程联合仿真,制定车辆惯性系数,车轮参数,附着系数,设置驱动方式,悬挂参数,设置发动机性能,制动阻尼及制动时前后轮受力比,设置档位,设置转向系统等,实现对于车辆参数设定及运动控制。图4为与CarSim联合仿真的样车及参数设置。
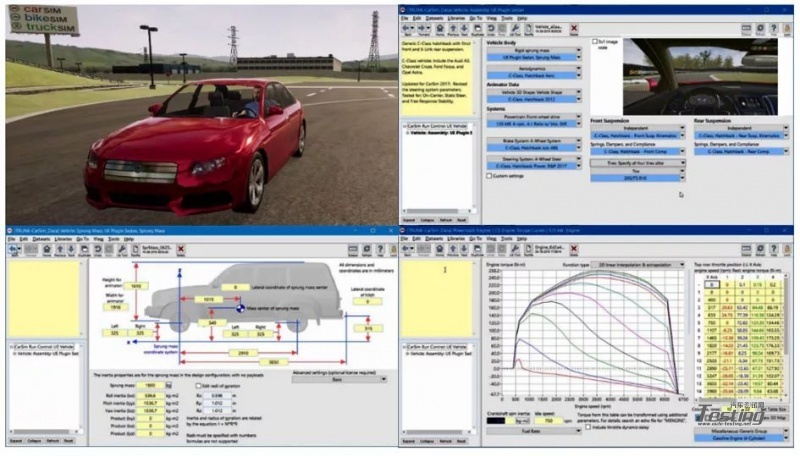
图4 CarSim联合仿真的样车及参数设置
2.3 复杂交通仿真环境构建
驾驶模拟器设计了交通信号灯的实时切换,添加了行人和AI车辆等交通参与,并利用UE4的蓝图通信模拟车路协同环境,实现交通信息准确、及时的获取。并基于学术界研究较多的车辆跟驰模型构建相应的模型模拟车路协同环境下的AI车辆队列驾驶,设计了自由驾驶、车辆跟驰、车速调节、启停超车等场景,为仿真平台提供一个逼真的复杂交通仿真环境,如图5所示。

图5 复杂交通仿真环境
2.4 驾驶模拟器硬件架构
驾驶模拟器的硬件架构包括:罗技G29力反馈方向盘踏板套装、DXRACER汽车座椅、两台大屏2k显示器以及一套立体声音响。罗技G29力反馈方向盘踏板套装包括一个方向盘,一个手动排挡,一个带离合器的赛车踏板。罗技G29的方向盘具有900度转向范围,可以最大程度模拟真实驾驶行为,还提供可编程键及方向控制键。两台大屏2k显示器作为视觉反馈设备显示虚拟驾驶场景,立体声音响作为听觉反馈器并考虑多普勒效应模拟真实驾驶音效以及环境音效,如图6所示。

图6 驾驶模拟器硬件架构
3 实时数据采集与驾驶员特性分析
驾驶模拟器设计了5个数据采集模块,如表1所示。可采集罗技G29力反馈方向盘踏板套装启动、转向、油门、刹车、排挡、手刹、转向灯、前大灯信号,实时获得本车驾驶速度、加速度、方向盘转角、油门刹车、前车驾驶速度、跟车车距、TTC、车道线偏离标准差SDLP、反应时间RT、车道状况、环境感知等信息,采集各工况驾驶数据。
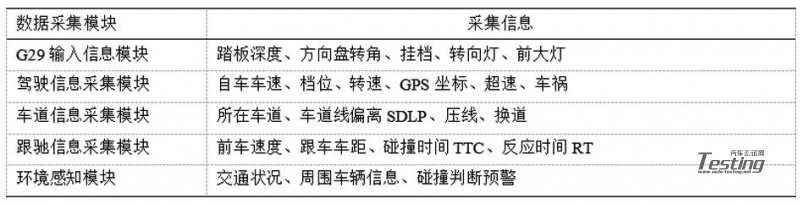
表1 数据采集模块信息统计表
利用驾驶模拟器再现交通环境并采集数据,与实测方法相比有调查费用低、安全性高、快速真实性、扩展性好、可控性高等几个方面的优点。驾驶数据采集的精确度、采集频率及数据量有很高要求,为了避免由于数据存在误差对本研究所造成的干扰,采用卡尔曼滤波方法对随机误差进行预处理,使适宜用于数据分析。
3.1 基于驾驶数据驾驶员特性分析
文献中驾驶员和车辆特性分析认为驾驶人-车辆单元作为交通流的主体具有整体特征,因此车辆行驶状态和车辆驾驶数据可以反应驾驶员操纵特性,纵向驾驶行为模型的刺激-反应关系的相关研究结果,如GM跟驰模型、CA模型、OV模型等,前后车速度差变量是影响跟车状态的主要因素之一,提取研究驾驶员特性的相关指标,包括反应时间RT、车头间距、跟车时距、最小安全距离、碰撞时间TTC、车速波动等。
基于驾驶模拟设计长时跟车实验采集驾驶数据,参与实验的34位受试驾驶员,其中24名男性驾驶员,10名女性驾驶员,年龄18到30岁,要求获得中华人民共和国C1驾驶执照,实际驾龄0到6年,身体健康,无严重精神疾病史和精神类药物服用史,属于正常人群个体。每位驾驶员进行多次连续的跟车实验,并采集驾驶数据。
对原始驾驶数据进行完整性分析、滤波处理、正态检验,最终得到140份可用样本数据,利用SPSS分析各组数据的显著性差异,确定显著性差异较大的反应时间RT、速度波动标准差SDS、平均速度差和最小碰撞时间TTC作为驾驶特性指标,利用这4项指标分析驾驶员特性。
模糊集合以及模糊推理理论自诞生至今都被认为是处理不确定规则等复杂问题的有效方法,并迅速在自动控制、模式识别等各大领域得到推广和应用。(Fuzzy,c-means,FCM)模糊聚类方法是一种无监督的模糊聚类方法,在算法实现过程中不需要人为的干预,是基于对目标函数的优化基础上的一种数据聚类方法。聚类结果为每一个数据点对聚类中心的隶属程度,该隶属程度用一个数值来表示。应用FCM聚类算法根据绝度误差和聚类数尽可能小的原则进行聚类,聚类结果是每一个数据点对聚类中心的隶属程度最大化,最终聚类数目为4,将驾驶员划分为熟练、稳健、激进、风险4个类别。聚类结果如图7所示,基本特性统计如表2所示。

图7 FCM模糊聚类结果
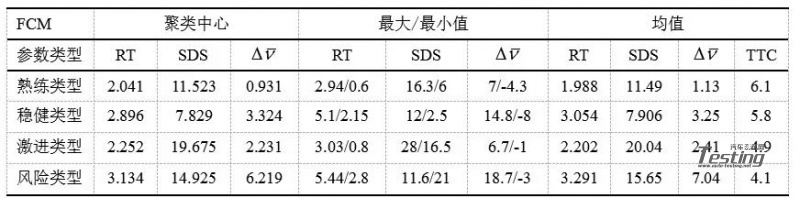
表2 FCM模糊聚类结果统计表
根据聚类结果发现:驾驶员特性聚类结果与碰撞时间TTC有很好的对应关系,熟练和稳健驾驶员碰撞时间TTC比激进和风险驾驶员普遍要高,更能保持安全距离跟车。熟练和激进驾驶员反应时间短,相较于稳健和风险类型驾驶员有更快的反应能力。激进和风险类型的驾驶员对速度比较敏感,速度波动相较熟练和稳定类型驾驶员大。风险类型驾驶员更倾向于开快车,且具有较长反应时间和较大的速度波动,碰撞时间TTC是各类型驾驶员中最小的,存在较大危险驾驶的可能,而激进驾驶员具有更优秀的反应能力,能更快规避风险。反应时间短、跟车稳定、与前车保持较小速度差且与前车保持安全距离行驶的驾驶员被分为熟练类型,符合现实环境中对于熟练驾驶员的理解。
实验发现熟练驾驶员能始终保持安全驾驶,具有较强反应能力和较好的速度控制能力,对危险状态比较敏感,说明驾驶员驾驶员特性能够反应驾驶能力。对每一个驾驶员一段时间驾驶数据的分析,发现在驾驶过程中同一驾驶员的驾驶特性会发生转变,说明驾驶员特性的转变将会影响驾驶员的实时驾驶能力。
4 结语
本文基于虚幻四引擎UE4交互式视景仿真技术,通过车辆、道路、建筑、交通灯、行人、路牌等交通元素的驾驶视景仿真环境搭建,开发了基于CarSim汽车动力学模型和罗技G29力反馈方向盘踏板的具有高拟真度和人机交互的驾驶模拟系统。该系统能实时采集驾驶数据,获取详尽的交通信息,能自定义复杂的交通状况,实现了优秀的画面表现,良好的人机交互体验。
本文应用FCM聚类算法对驾驶模拟器采集的驾驶员驾驶数据进行聚类分析,根据绝度误差和聚类数尽可能小的原则进行聚类,使数据点对聚类中心的隶属程度最大化,将驾驶员特性划分为熟练、稳健、激进、风险4个类别,聚类结果符合人们对驾驶员特性的理解。
聚类研究表明:驾驶员特性聚类结果与碰撞时间TTC有很好的对应关系,且驾驶员特性的转变将会影响驾驶员的实时驾驶能力,为进一步评价驾驶员的驾驶能力并建立基于实时驾驶能力的驾驶权分配机制研究奠定了基础。
关键词:虚幻4 驾驶模拟器 驾驶员特性 聚类分析 实时驾驶能力
1 引言
利用视景仿真技术模拟三维世界,构造逼真的仿真模型,模拟逼真的仿真环境,达到近乎真实的仿真效果,可实时获得视觉、听觉、触觉等感官体验。将视景仿真技术应用到智能交通系统,能够为智能交通系统仿真提供真实、生动的交通仿真环境,构建新颖的交通仿真模式。针对三维图形渲染引擎的开发,国外游戏软件公司以及几所顶尖学府均投入了大量的人力物力。在这些商业引擎的推动下,三维图形渲染技术得到了迅猛的发展。杨亚联等基于Unity3D软件开发了人在环路的人机交互式视景仿真系统,S. de Groot等利用驾驶模拟器,研究驾驶员驾驶能力和驾驶风格。Epic Game公司3A级三维图形渲染引擎虚幻4(Unreal Engine 简称UE4)具有用户友好的图形界面,完善的功能模块。本文利用UE4设计开发驾驶模拟器,开发的人机交互式驾驶模拟仿真系统通过逼真的交通场景设计,能够准确收集驾驶员在复杂交通场景下的驾驶行为和驾驶能力数据,为驾驶员行为、驾驶员特性以及驾驶能力评估提供科学依据。
2 驾驶模拟器仿真环境和硬件架构
驾驶模拟视景仿真环境包含人、车、路等多个交通元素,是一个十分复杂的、包含各种典型交通场景的庞大系统。为了获得优秀的交互性,逼真的汽车动力学特性,惊艳的场景画面以达到沉浸式的效果,本文基于专业的游戏引擎UE4,结合CarSim汽车动力学仿真模型和罗技G29力反馈方向盘踏板套装,设计开发驾驶模拟器的视景仿真环境和硬件架构,实现优异的用户体验。
2.1 仿真环境模型构建
仿真环境构建需要大量的反映交通元素的三维模型。驾驶仿真环境基于三维制作软件Maya和3Dmax建立三维模型,并用Photoshop制作贴图,再利用V-ray渲染,以增强其视觉体验感。从三维软件导出FBX文件到UE4软件中,定义三维模型的空间位置,使用引擎的地形工具创建地貌,利用种植功能添加植被,使其与地貌相吻合,利用天空球配置环境光源、大气层、雾气等,再利用decal增加场景的细节效果,最后利用GI动态全局光照,实现实时光照动态渲染,构建了无缝连接的城市、山间、小镇和高速公路场景,实现了丰富的仿真场景、真实的光影效果和多变的天气情况。如图1所示是建立的车辆、道路、建筑、交通灯、行人、路牌等交通元素模型,编辑的地形和植被模型,昼夜变化效果等。
图1 仿真环境模型和昼夜天气变化效果
模拟驾驶的交互要真实反馈驾驶员操纵以及驾驶过程中的车辆及驾驶环境信息,模拟驾驶交互设计框架如图2所示。
图2 驾驶交互设计框架
驾驶模拟器设计驾驶员视角用于模拟驾驶,模拟实时驾驶景象,反馈后视镜、车速、档位、导航地图等信息,并实现高速运动动态模糊和转弯视觉模拟效果以增强驾驶临场感和速度感,图3是驾驶员视角。
图3 驾驶员视角
2.2 驾驶车辆运动模型构建
虚拟车辆需要具有真实车辆的纵横向运动学特性,本文车辆动力学模型部分采用CarSim软件进行参数化建模,由于CarSim以车辆总成的实际数据为基础,以此建立的整车模型与实际车辆高度一致,确保驾驶模拟器中驾驶员操作的真实与驾驶数据的可靠。
利用CarSim汽车动力学模型和UE4的Vehicle Component结合C++语言编程联合仿真,制定车辆惯性系数,车轮参数,附着系数,设置驱动方式,悬挂参数,设置发动机性能,制动阻尼及制动时前后轮受力比,设置档位,设置转向系统等,实现对于车辆参数设定及运动控制。图4为与CarSim联合仿真的样车及参数设置。
图4 CarSim联合仿真的样车及参数设置
2.3 复杂交通仿真环境构建
驾驶模拟器设计了交通信号灯的实时切换,添加了行人和AI车辆等交通参与,并利用UE4的蓝图通信模拟车路协同环境,实现交通信息准确、及时的获取。并基于学术界研究较多的车辆跟驰模型构建相应的模型模拟车路协同环境下的AI车辆队列驾驶,设计了自由驾驶、车辆跟驰、车速调节、启停超车等场景,为仿真平台提供一个逼真的复杂交通仿真环境,如图5所示。
图5 复杂交通仿真环境
2.4 驾驶模拟器硬件架构
驾驶模拟器的硬件架构包括:罗技G29力反馈方向盘踏板套装、DXRACER汽车座椅、两台大屏2k显示器以及一套立体声音响。罗技G29力反馈方向盘踏板套装包括一个方向盘,一个手动排挡,一个带离合器的赛车踏板。罗技G29的方向盘具有900度转向范围,可以最大程度模拟真实驾驶行为,还提供可编程键及方向控制键。两台大屏2k显示器作为视觉反馈设备显示虚拟驾驶场景,立体声音响作为听觉反馈器并考虑多普勒效应模拟真实驾驶音效以及环境音效,如图6所示。
图6 驾驶模拟器硬件架构
3 实时数据采集与驾驶员特性分析
驾驶模拟器设计了5个数据采集模块,如表1所示。可采集罗技G29力反馈方向盘踏板套装启动、转向、油门、刹车、排挡、手刹、转向灯、前大灯信号,实时获得本车驾驶速度、加速度、方向盘转角、油门刹车、前车驾驶速度、跟车车距、TTC、车道线偏离标准差SDLP、反应时间RT、车道状况、环境感知等信息,采集各工况驾驶数据。
表1 数据采集模块信息统计表
利用驾驶模拟器再现交通环境并采集数据,与实测方法相比有调查费用低、安全性高、快速真实性、扩展性好、可控性高等几个方面的优点。驾驶数据采集的精确度、采集频率及数据量有很高要求,为了避免由于数据存在误差对本研究所造成的干扰,采用卡尔曼滤波方法对随机误差进行预处理,使适宜用于数据分析。
3.1 基于驾驶数据驾驶员特性分析
文献中驾驶员和车辆特性分析认为驾驶人-车辆单元作为交通流的主体具有整体特征,因此车辆行驶状态和车辆驾驶数据可以反应驾驶员操纵特性,纵向驾驶行为模型的刺激-反应关系的相关研究结果,如GM跟驰模型、CA模型、OV模型等,前后车速度差变量是影响跟车状态的主要因素之一,提取研究驾驶员特性的相关指标,包括反应时间RT、车头间距、跟车时距、最小安全距离、碰撞时间TTC、车速波动等。
基于驾驶模拟设计长时跟车实验采集驾驶数据,参与实验的34位受试驾驶员,其中24名男性驾驶员,10名女性驾驶员,年龄18到30岁,要求获得中华人民共和国C1驾驶执照,实际驾龄0到6年,身体健康,无严重精神疾病史和精神类药物服用史,属于正常人群个体。每位驾驶员进行多次连续的跟车实验,并采集驾驶数据。
对原始驾驶数据进行完整性分析、滤波处理、正态检验,最终得到140份可用样本数据,利用SPSS分析各组数据的显著性差异,确定显著性差异较大的反应时间RT、速度波动标准差SDS、平均速度差和最小碰撞时间TTC作为驾驶特性指标,利用这4项指标分析驾驶员特性。
模糊集合以及模糊推理理论自诞生至今都被认为是处理不确定规则等复杂问题的有效方法,并迅速在自动控制、模式识别等各大领域得到推广和应用。(Fuzzy,c-means,FCM)模糊聚类方法是一种无监督的模糊聚类方法,在算法实现过程中不需要人为的干预,是基于对目标函数的优化基础上的一种数据聚类方法。聚类结果为每一个数据点对聚类中心的隶属程度,该隶属程度用一个数值来表示。应用FCM聚类算法根据绝度误差和聚类数尽可能小的原则进行聚类,聚类结果是每一个数据点对聚类中心的隶属程度最大化,最终聚类数目为4,将驾驶员划分为熟练、稳健、激进、风险4个类别。聚类结果如图7所示,基本特性统计如表2所示。
图7 FCM模糊聚类结果
表2 FCM模糊聚类结果统计表
根据聚类结果发现:驾驶员特性聚类结果与碰撞时间TTC有很好的对应关系,熟练和稳健驾驶员碰撞时间TTC比激进和风险驾驶员普遍要高,更能保持安全距离跟车。熟练和激进驾驶员反应时间短,相较于稳健和风险类型驾驶员有更快的反应能力。激进和风险类型的驾驶员对速度比较敏感,速度波动相较熟练和稳定类型驾驶员大。风险类型驾驶员更倾向于开快车,且具有较长反应时间和较大的速度波动,碰撞时间TTC是各类型驾驶员中最小的,存在较大危险驾驶的可能,而激进驾驶员具有更优秀的反应能力,能更快规避风险。反应时间短、跟车稳定、与前车保持较小速度差且与前车保持安全距离行驶的驾驶员被分为熟练类型,符合现实环境中对于熟练驾驶员的理解。
实验发现熟练驾驶员能始终保持安全驾驶,具有较强反应能力和较好的速度控制能力,对危险状态比较敏感,说明驾驶员驾驶员特性能够反应驾驶能力。对每一个驾驶员一段时间驾驶数据的分析,发现在驾驶过程中同一驾驶员的驾驶特性会发生转变,说明驾驶员特性的转变将会影响驾驶员的实时驾驶能力。
4 结语
本文基于虚幻四引擎UE4交互式视景仿真技术,通过车辆、道路、建筑、交通灯、行人、路牌等交通元素的驾驶视景仿真环境搭建,开发了基于CarSim汽车动力学模型和罗技G29力反馈方向盘踏板的具有高拟真度和人机交互的驾驶模拟系统。该系统能实时采集驾驶数据,获取详尽的交通信息,能自定义复杂的交通状况,实现了优秀的画面表现,良好的人机交互体验。
本文应用FCM聚类算法对驾驶模拟器采集的驾驶员驾驶数据进行聚类分析,根据绝度误差和聚类数尽可能小的原则进行聚类,使数据点对聚类中心的隶属程度最大化,将驾驶员特性划分为熟练、稳健、激进、风险4个类别,聚类结果符合人们对驾驶员特性的理解。
聚类研究表明:驾驶员特性聚类结果与碰撞时间TTC有很好的对应关系,且驾驶员特性的转变将会影响驾驶员的实时驾驶能力,为进一步评价驾驶员的驾驶能力并建立基于实时驾驶能力的驾驶权分配机制研究奠定了基础。
- 下一篇:高比能固态锂电池技术最新研究进展
- 上一篇:大数据时代下智能交通系统的发展思考







最新资讯
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
-
EMC成为新贸易壁垒,零跑在乌兹被全面叫停
2025-04-07 08:37
-
Euro-NCAP 2026 鞭打规程解读
2025-04-07 08:36
