




 广告
广告





















































发动机舱水位预测方法的理论研究
2019-09-14 20:34:39· 来源:AutoAero

当车辆在路面上行驶时,水进入发动机舱,有时到达进气口导管和电气部件的位置并导致可靠性问题。数值模拟是研究这种现象的有效工具,因为它不仅可以在实验前评估水位,还可以识别浸水路线。
摘要:当车辆在路面上行驶时,水进入发动机舱,有时到达进气口导管和电气部件的位置并导致可靠性问题。数值模拟是研究这种现象的有效工具,因为它不仅可以在实验前评估水位,还可以识别浸水路线。近来,为了提高车辆性能(例如,空气动力学,外部噪音),发动机冷却模块周围的间隙趋于变小,并且底盖趋于变得比以前更大。发动机室周围的泄漏密封性要求变得更高,因此车辆姿态变化对水位影响较大。本文介绍了利用多体和流体动力学耦合来预测在高速公路上行驶的汽车发动机舱内水位的方法。运用MPS(移动粒子半隐式)方法分析自由表面流体,三维多体动力学分析计算悬架位移,因此,预测方法的精度在±5%以内,水位和悬浮位移时程与实验吻合较好。结果表明,根据车速和水深的不同,水上升现象被分为2种模式。通过讨论,指出了考虑车辆姿态的重要性,得出的结论运行条件通过考虑在高速公路上行驶时作用在车辆上的作用力分类。
人们期望汽车可以在路面上行使可靠,其中一种路况是高速公路,当车辆在如图1所示的高速公路上行驶时,水进入发动机舱,有时到达进气管道和电气部件的位置并导致可靠性问题。在高速公路上行驶时的性能影响发动机舱的设计,数值模拟是该领域的一个有效工具,因为它不仅可以在实验前评估水位,而且可以识别浸水路线,了解进水现象并得出对策。

图1 车辆在水淹道路上行驶的情况
Yamamura等人开发了模拟方法,用CFD预测进气区域的水位,并用多元回归分析确定了确定水位的因素。这项研究假设车辆固定在一个固定的位置,而水的流速等于车辆的正常行驶速度。近来,为了提高空气动力学和外部噪声性能,发动机冷却模块周围的空隙趋于变小,并且底盖趋于比以前更大。在发动机舱周围的泄漏密封性变得更高,并且在高速公路上行驶时引起从水到车辆的浮力增加。因此,车辆的姿态改变正在对水位造成更大的影响。此外,要确定水位在预期水平内达到最高水平的情况则更加困难。本文介绍了建立模拟技术来预测发动机舱内的水位,考虑到由于水的压力引起的车辆运动。讨论了车速,水深和悬架模型变化的情况以及水上升机理。
仿真方法
数值方法论
在这项研究中,耦合多体和流体动力学方法被开发来预测车辆周围的水位。对车辆周围的水流进行了模拟,并通过流体动力学分析计算了从水到车辆的浮力。将其力传递给多体动力学分析,计算车辆姿态。此外,车辆的姿态反馈给流体动力学分析。换句话说,流体动力学分析和多体动力学分析是严格耦合的。
流体动力学分析方法
采用MPS(移动粒子半隐式)方法模拟自由表面流动。MPS方法是具有自由表面和无网格拉格朗日方法的不可压缩流体方法。在这种方法中,流体由粒子表示,流体的行为被计算为粒子的运动。因此这种方法不需要网格。这点非常有用,因为没有必要根据车辆姿态重新计算模拟网格,并有助于减少模拟时间。用质量连续性方程(1)和N-S方程(2)表示控制方程。
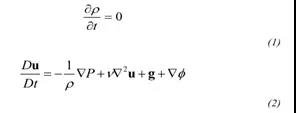
在粒子相互作用模型中,使用权函数(方程(3))来计算与其相邻粒子间的相互作用。
相互作用仅对有限距离内的粒子起作用,使用潜在模型来计算表面张力。上述控制方程的数值设定和特性设置如表1和表2所示,粒径是根据模拟结果的收敛性来确定的。

表一 MPS方法的数值设置
表二 水的参数设置
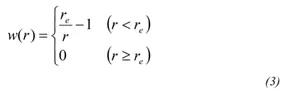
作为本研究的初步计算,该MPS方法被应用于图2(车辆模型)和图3(测试区域)简化车辆的水上行驶问题。四个车辆的初始速度和水深发生了变化。该计算的数值设置与表1不同,因为简化车辆的尺寸远小于整车。粒径设定为3mm,影响半径为6.3mm。图4显示了实际和模拟之间简化车辆前方最大水位的比较。水位被定义为离坡路的高度。从图4可以看出,仿真结果与实验结果吻合较好。准确度在±5%以内。通过这些计算,本研究证实了车辆路径运行的有效性。
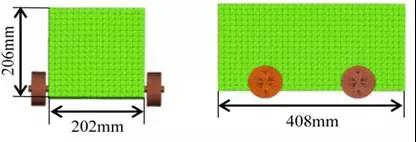
图2 简化车辆模型
图3 测试区域

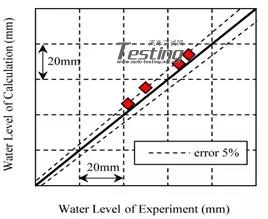
图4 实验和仿真对比
多体动力学分析方法
机械部件被模拟为刚体和质量属性分配给车身,每个刚体都受到固定,旋转和平移连接的限制。在这个机械系统上施加外力,并且在微分运动方程和代数约束方程的基础上计算物体的运动。在这项研究中,使用FunctionBay公司的RecurDyn V8R4进行多体动力学分析。
分析几何流体动力学模型
流体动力学分析模型由分析区域(图5)和车辆模型(图6)组成。分析区域以丰田的水下试验场道路为基础,坡度角,水路宽度和侧墙高度与实验室相同。车辆模型由10部分组成,车身,四个底部弹簧,轮胎和车轮以及后梁。这些零件的建模仅在外表面复制,与空气动力学分析相似的建模。(图7)模拟了热交换器周围的面部区域和屏蔽状态,其对发动机舱内的水位有很大的影响。零件相互独立,通过多体动力学分析的约束相互连接。将隔室内的换热器建模为体积区域,并将通水阻力定义为水流速度和压差的函数(图8)。
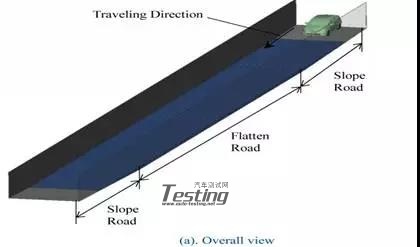
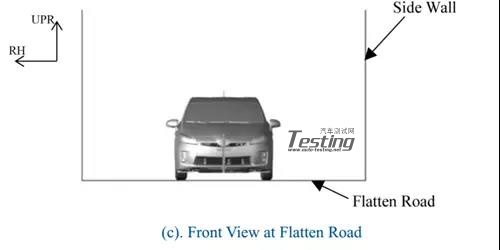
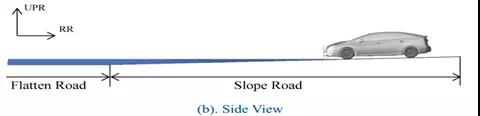
图5 分析区域
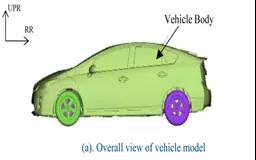
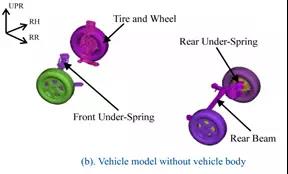
图6 汽车模型

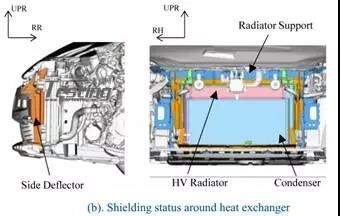
图7 车辆局部细节
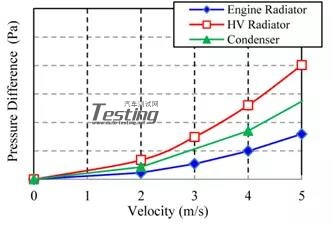 图8 水的热交换特征图
图8 水的热交换特征图多体动力学模型
使用图9所示的多体动力学模型。这个模型由流体动力学分析的10个部分和车辆模型组成。所有部分都被认为是刚体,每个刚体的质量和惯性矩都被确定下来,所有部分都相互制约。对于前悬架,两个下弹簧通过旋转接头与每个轮胎和车轮连接,并且这两个下弹簧通过平移接头与车身连接。对于后悬挂,两个下弹簧通过旋转接头与每个轮胎和车轮连接,并且这两个下弹簧与后横梁固定,后横梁通过平移连接与车身连接。弹簧和阻尼系数定义为四个平移关节。为了减少数值波动,在轮胎和地面之间施加气缸到地面的接触条件。滚动阻力系数被施加到轮胎表面以计算滚动阻力。

图9 多体动力模型
模拟条件
仿真案例
表3显示了仿真案例,模拟了十一个案例。在这些情况下,改变车速,水深和悬架模型,以验证所开发的方法,根据车辆状况比较水位,明确使用耦合多体和流体动力学分析的必要性。比较两种悬架模型,活动模型和刚性模型。本研究采用柔性模型来重现车辆的姿态,刚性模型使车辆姿态在静止状态下固定。换句话说,即使来自水的浮力作用在车辆上,车辆也不能在垂直方向上移动。

表三 模拟方案
运行条件
基于图10中的实验数据定义车辆速度。时间是由通过测试车辆从入口坡顶到达路面终点时的时间来标准化,以便容易地比较不同的车辆速度状况结果。车速取决于驱动力与水阻力之间的关系,当阻力小时,车辆可以以目标速度行驶(情况1和5)。然而,当阻力高时,车辆不能保持在水中的目标速度,可以以较低的速度行驶(情况4和6)。
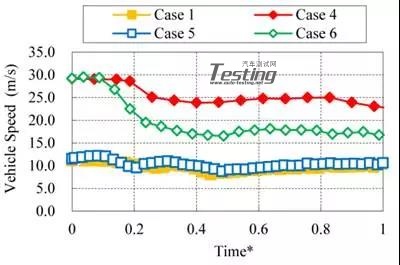
图10 1、4、5、6方案下车速
结果
验证
通过实验结果与模拟结果的比较验证了所开发方法的有效性。图11显示了最大水位的比较结果。水位定义为每个传感器下端的高度。图12显示了水位传感器的位置,这些位于发动机冷却模块(ECM)的前部和后部,精确度在简化的车辆情况下的±5%以内(图11)。水位时程曲线比较如图13所示。比较结果显示,不仅水位高度一致,而且悬浮位移也很好。将车辆周围的流场与实验进行比较(图14)。从定性和定量两方面来看,模拟可以准确地再现实验中观察到的自由表面的形状。
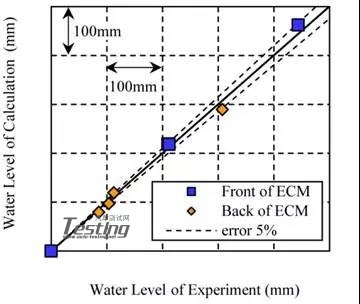
图11 1、4、5、6方案下水位变化
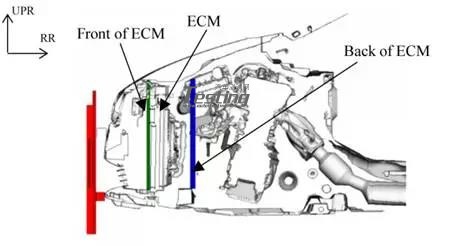 图12 水位传感器的位置
图12 水位传感器的位置 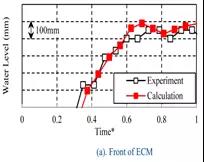
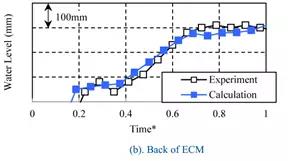
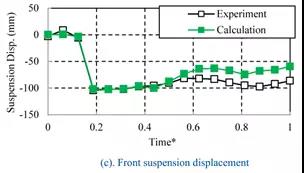
图13 试验和仿真结果的比较(方案6)

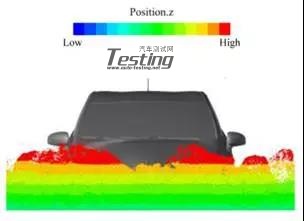
图14 汽车周围流场的比较(方案6,时间*=0.8)
水深200mm水位结果
发动机舱内水涨的现象根据车速分为2种模式。图15显示了每种情况下发动机冷却模块前后水位的时间历程。在这种情况下,车辆进入路面的时间大约是时间*=0.15。在案例1和案例2中,ECM前面的水位在进入后不久就上升,达到最高水平,之后下降并转换到几乎恒定的水平。后面的变化和前面的变化几乎一样,但是水平是一样的比前面小。另一方面,在Case3和Case4中,水平并没有上涨一段时间,从ECM的后面上涨。
图16显示了Case1中Time*=0.25和Time*=0.8时的流场。在这种情况下,水从前格栅进入发动机舱并转换到稳定状态。因此前侧的水平高于后侧的水平。Case1和Case2所代表的这种变化被定义为模式I。
图17显示了Case4中Time*=0.3和Time*=0.6时的流场。图18显示了Case1和Case4之间的前悬架位移的比较。在这种情况下,水从发动机罩下方的间隙进入发动机室,并从ECM的后面移动到前面。悬架位移比Case1大得多(图18)。因此前侧的水位低于后侧的水位。改变以Case3和Case4为代表的模式被定义为模式II。基本上,所有案例的结果都表明,模式一的水位高于模式二。

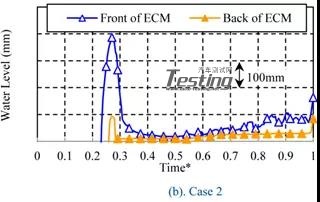
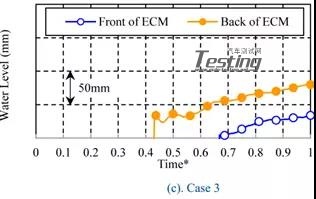
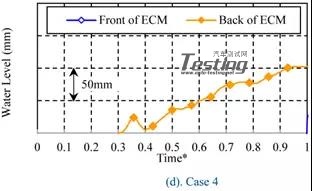 图15 200mm水深的随随时间的水位
图15 200mm水深的随随时间的水位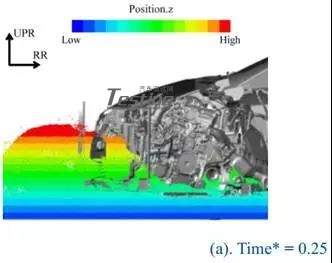
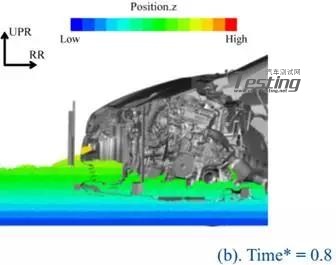 图16 方案1的流场
图16 方案1的流场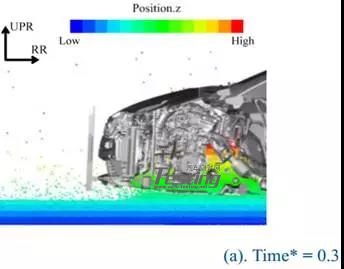
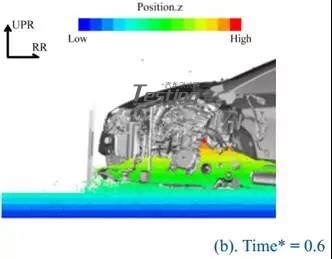 图17 方案4流场
图17 方案4流场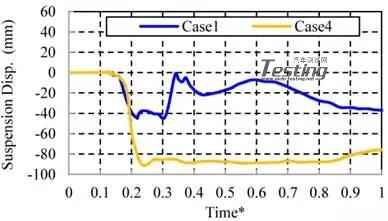
图18 前悬架位移比较
水深300mm水位结果
根据水深200mm的结果分类,总结了水深300mm的结果。图19显示了每种情况下的水位时间历程。在这种情况下,进水时间为时间*=0.15,水深为200mm的情况。在案例5中,与案例1和案例2类似,水位在入场后不久达到最大值。因此,Case5被分为模式I.在案例6中,水位没有上升一段时间,从ECM的后面上升,类似于模式II(Case3和Case4)。然而,水平从时间*0.5左右开始上升,特别是前面比后面有上升的趋势。图20显示了Case6中Time*=0.3,Time*=0.5,Time*=0.7时的流场。
起初,进入发动机舱的水主要来自发动机罩下的空隙(时间*=0.3),即模式是模式II。之后,水从前格栅进入并且前侧的水位超过了后侧的水位。即,模式转换到模式II。
综上所述,在案例6中,模式II的流场形成于第一和第二,然后改变为模式I的模式。
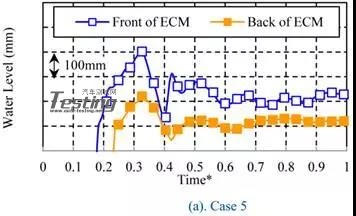
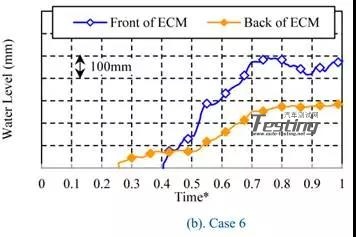
图19 300mm水深的水位线
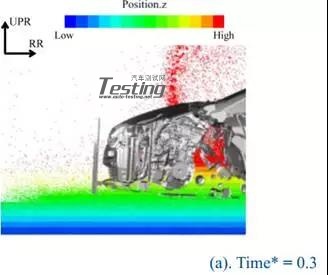
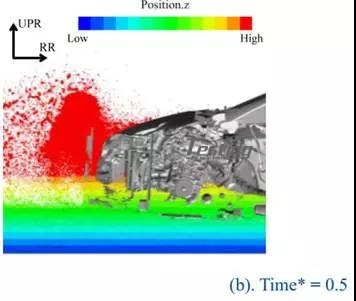
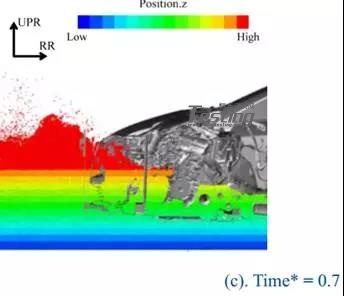
图20 方案6的流场
车辆姿态对发动机舱的影响
水位
水位
最大水位比较悬架模型,灵活和刚性模型。图21显示了每种情况下最大水位的比较。对于所有刚性模型的情况,无论传感器位置如何其值均超过了柔性模型的单调性,均取决于车辆速度而增加。另一方面,对于灵活的车型,这些值根据车速而复杂地增加或减少。
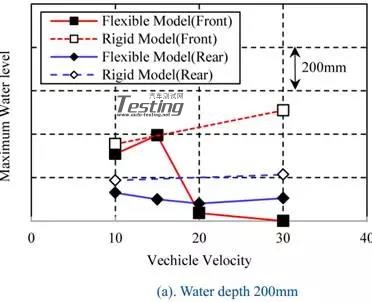
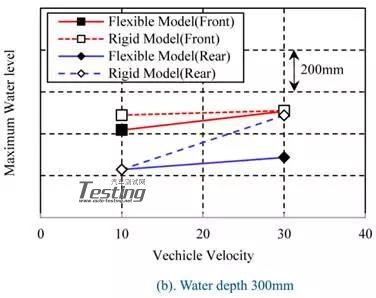
图21 两个悬架模型的比较
讨论
结果表明,所有病例按进水路径分为2类,Ⅰ类水位高于Ⅱ类水位。在这一节中,模式I和模式II之间的机制差异被阐明,并且运行条件被分类。
模式I和II之间的机制差异
为了揭示水上涨机制,考虑了水面典型流线和能量的变化。在水粒子与车辆接触之前,假设由动能和势能组成的总能量应该被保留(方程(4))。
其中E表示总能量,ρ是密度,u是水粒子与车辆之间的相对速度,g是重力加速度,h是水位从车辆的角度来看,水面颗粒运动的示意图如图22所示。
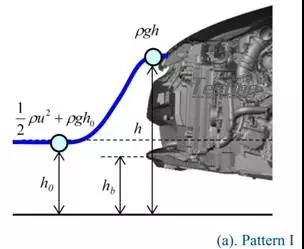
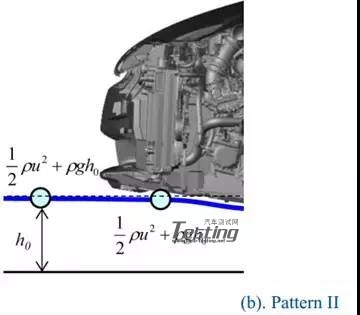
图22 水粒子位置与能量的关系
据推断,在模式I中,粒子的动能转换为势能,另一方面在模式II中动能不转换并保持为动能。而且,假设模式I和模式II之间的差异是下保险杠前缘(hb)的高度和水面的高度之间的相对位置。为了验证上述模式I的推导,比较Case5和Case10的流量,如图23所示。在这些情况下,设定相同的车速和相同的水深,但悬架模型不同。在这两种情况下,车辆前方地面的水位几乎相同(图23)。因此,即使车辆姿态不同,车辆前方的水位在相同的测试条件下也保持不变,但发动机舱内的水位在很大程度上受车辆位置的影响。Case3(速度幅度分布)的流场如图24所示。图24的速度是从车辆的角度来看的相对值。在这种模式中,在颗粒碰撞车辆之前,速度保持恒定。因此,车辆前方的水位实际上是相同的,而不涉及车辆姿态。但是,发动机舱内的水平根据车辆姿态而变化非常多。因此,为了更精确地预测发动机舱内的水平,推测考虑姿态是重要的。
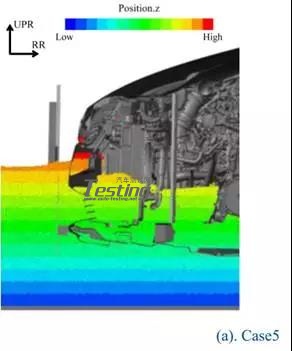
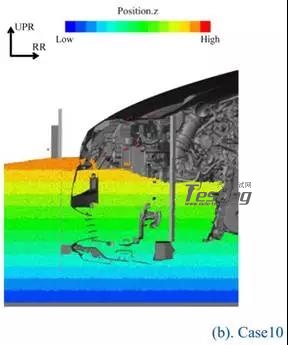
图23 方案10和方案5流场比较
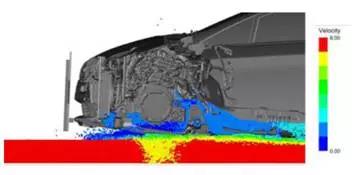
图24 速度大小分布(方案3)
运行条件的分类
图25中示出了在路面上行驶时作用在车辆上的力。在车身上,重力,来自水的浮力和来自弹簧的反作用力在垂直方向上平衡,并且来自水的阻力来自驱动轴的驱动力在水平方向上平衡。
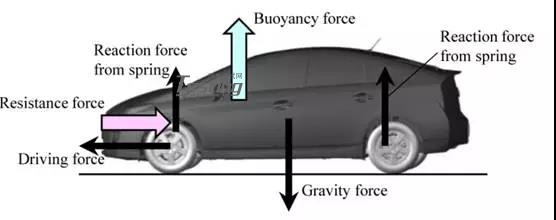
图25 涉水道路上行驶车身上的作用力考虑到上升机构的形式是由车体的垂直位置决定的,推测可以从以下方式对运行状况进行分类。
i. 垂直位置由垂直力平衡决定,因此受到浮力的影响。
ii. 浮力由车速决定。
iii. 车速由水平力平衡决定,因此受到水的阻力影响。
图26显示了阻力和车速之间的关系。基本上,对于每个水深,阻力随车速的平方增加。
图26中的黑线表示驱动力的限制。车辆不能越过黑线。实际上,Case6的阻力大于动力,车速从30km/h降到17km/h。图27显示了车速和浮力之间的关系。而图28显示了浮力与下保险杠前缘(hb)离地面的高度之间的关系。
通过以上讨论(模式I和模式II之间的机制差异),推测机构模式由下保险杠前缘高度与水面高度之间的相对位置决定。例如,在水深200mm时,如果下保险杠前缘的高度低于200mm,则壳体被分类为图案I。另一方面,当高度大于200mm时,表壳被分类为图案II。事实上,案例1和案例2分为模式一和案例三,案例四分为模式二。
基于上述考虑,可以得出结论:可以确定模式I和模式II之间的界限。与图26,27和28结合的图形如图29所示。从左下象限,图案I和图案II之间边界的浮力由边界高度决定。从右下象限,边界的车速由浮力决定。最后,从右上象限,阻力由车速决定。图29中的红线表示模式I和模式II的分隔线。从图29可以看出,运行条件可以分为两种机制模式,红线是模式I和模式II的边界。
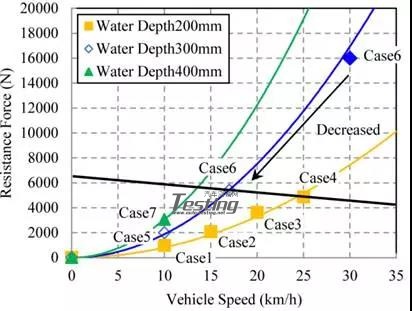
图26 车速与阻力的关系
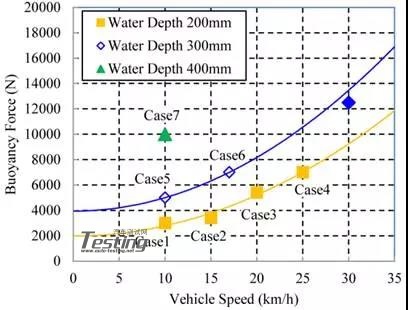
图27 车速与浮力之间的关系
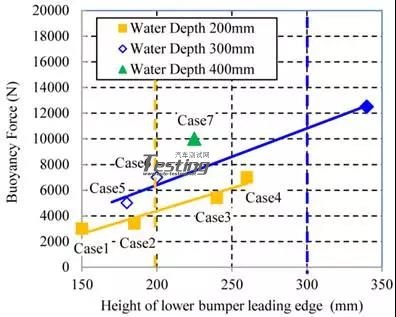
图28 下保险杠前缘高度与浮力之间的关系
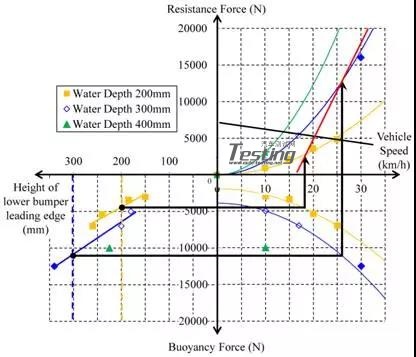
图29 两种模式数的上升机理分类
结论
通过耦合多体和流体动力学,开发了用于预测发动机舱内水位的模拟技术。预测方法精度在±5%以内,水位和悬浮位移时程与实验吻合较好。通过对车速,水深和悬架模型改变的几种情况的仿真结果,得到以下结论。发动机舱内水涨的现象根据车速和水深分为2种模式。在模式I中,水主要从前格栅进入发动机舱,并且在模式II中从发动机盖下的间隙进入发动机舱。基本上,模式I的水位高于模式II的水位。可以得出结论,车辆前方的水位由运行条件决定,但发动机舱内的水位因车辆姿态而异。通过考虑在高速公路上行驶时的车辆作用力,可以将运行条件分为2种模式。
- 下一篇:F1赛车的尾流研究
- 上一篇:流体力学艺术 通用汽车小型风洞实验室






最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
