




 广告
广告





















































仿真与测试助力自动驾驶汽车管控安全风险
2018-06-04 11:00:35· 来源:佐思汽车研究

交通事故几乎都是由人为失误造成的。当人做出错误行为,我们可进行自动驾驶功能的有效介入;在德国高速公路上,每750万公里行驶里程就可能出现一次操作失误。驾驶过程中,人类做出正确操作远多于错误行为。我们的目标是把人的正确驾驶行为变成自动化操作,今后驾车行驶750万公里,一定不能有一次闪失。
梅赛德斯奔驰智能驾驶系统包括:
- 智能领航限距控制功能(Active Distance Assist DISTRONIC)
- 注意力辅助系统(AttentionAssist)
- 主动转向辅助系统(Active Steering Assist)
- 主动式车道保持辅助系统(Active Lane Keeping Assist)
- 主动式刹车辅助系统(Active Brake Assist)
- 多光束LED(Multibeam LED)
- C2X通讯(Car-to-X Communication)
- 预防性安全系统增强版(PRE-SAFE®PLUS)
- 预碰撞安全系统声响警告(PRE-SAFE®Sound)
- 安全带气囊系统(Beltbag)
- 主动盲点辅助系统(Active Blind Spot Assist)
- 远程泊车辅助系统(Remote Parking Assist)
- 规避转向辅助系统(Evasive Steering Assist)

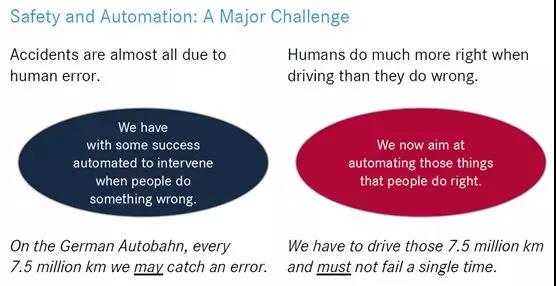
安全与自动驾驶的主要挑战
交通事故几乎都是由人为失误造成的。当人做出错误行为,我们可进行自动驾驶功能的有效介入;在德国高速公路上,每750万公里行驶里程就可能出现一次操作失误。驾驶过程中,人类做出正确操作远多于错误行为。我们的目标是把人的正确驾驶行为变成自动化操作,今后驾车行驶750万公里,一定不能有一次闪失。
自动驾驶车辆的安全性
在乘坐自动驾驶汽车自由驰骋之前,需先确保它不会给你带来麻烦。那么如何管控风险?
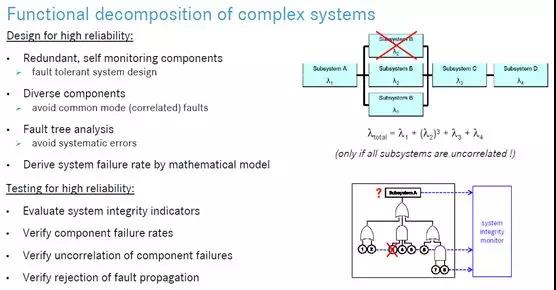
复杂系统的功能分解(高可靠性设计及测试)
驾驶情景的安全评估
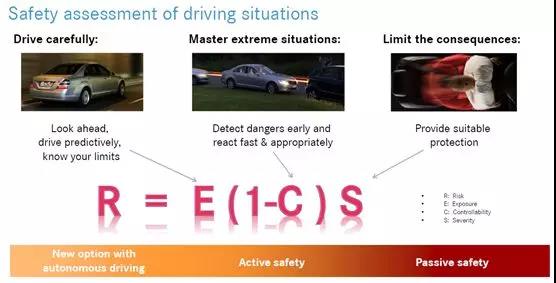
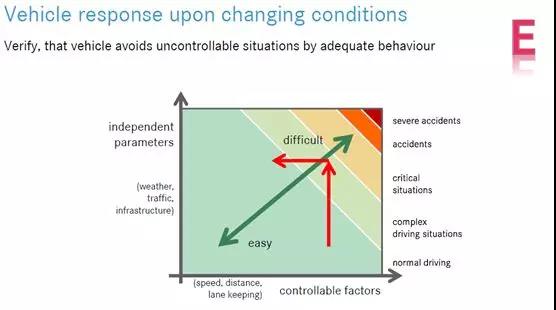
通过适当行为,避免失控局面发生
根据不同条件变化下的车辆反应,来进行验证
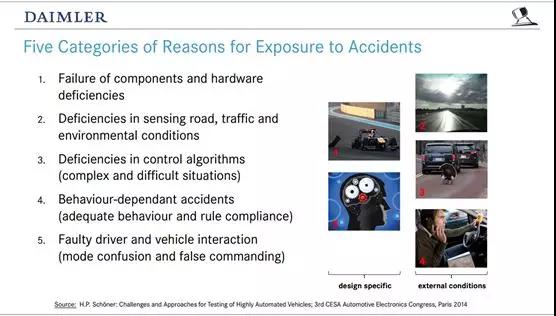
暴露于事故之中的5类原因
- 硬件和元器件失效
- 道路、交通、环境条件的感知不足
- 复杂和困难场景的控制算法缺陷
- 行为依赖的事故(譬如打手机)
- 错误的驾驶员和车辆的交互(模式混乱和错误指令)
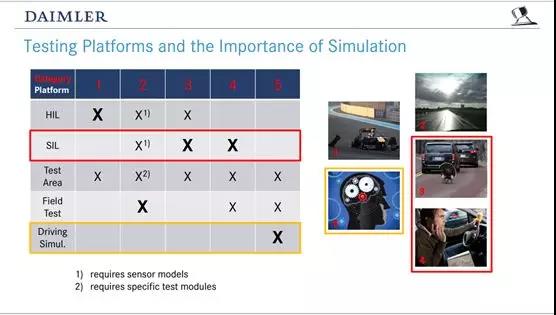
测试平台和仿真的重要性
如何衡量可控性?
辛德芬根的动态模拟器

交通事故的可控性


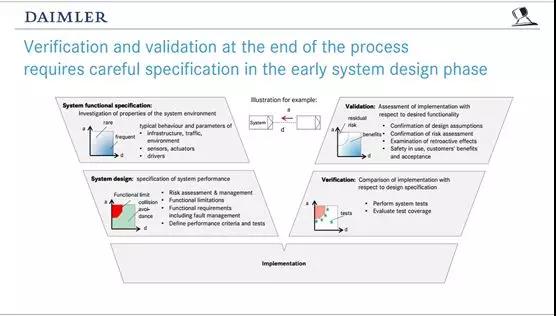
如何验证驾驶功能?
过程结束时的验证,需要在早期系统设计阶段制定详细规范
自动驾驶功能的测试

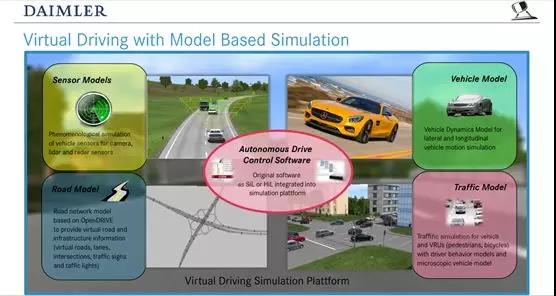
基于模型仿真的虚拟驾驶
自动驾驶控制软件
SiL或HiL等原创软件集成到仿真平台中
传感器模型
摄像头、激光雷达和雷达传感器的模拟
车辆模型
模拟横向和纵向运动的车辆动力学模型
道路模型
基于OpenDRIVE的路网模型提供虚拟道路和基础设施信息(虚拟道路、车道、交叉路口、交通标志和信号灯)
交通模型
车辆和VRU(行人、自行车)的交通模拟,并附有驾驶员行为模型和微观车辆模型
虚拟驾驶模拟平台
示例:真实世界场景及其模拟
使用案例:复杂交通场景的功能开发

挑战性的交通场景
跟车——前车在没有提前制动的情况下进入拥堵路段
切入——车辆猛然切入,没有逃离空间
切出——汽车在障碍物或迎面而来的汽车到达前切出
使用案例:避免碰撞场景的功能开发

切入场景模拟

仿真验证:以较高的相对速度切入

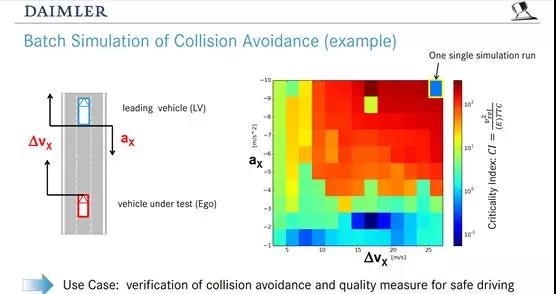
防碰撞的批量模拟(示例)
领先车辆(LV)
测试车辆(Ego)
使用案例:确保安全驾驶的防撞验证和质量措施
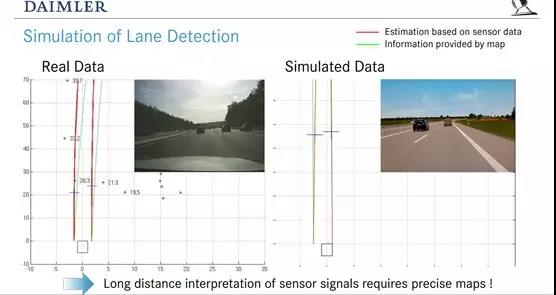
车道检测模拟
基于传感器数据的估计
真实数据
模拟数据
地图信息
传感器信号的长距离解读需要精确的地图
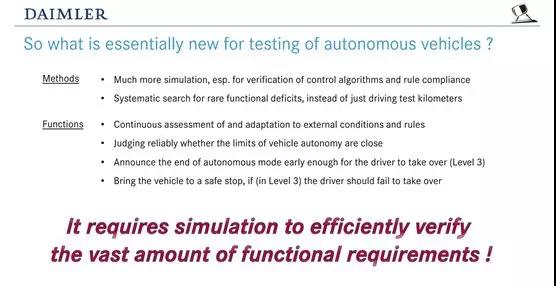
自动驾驶汽车测试的创新是什么?
方法
更多的模拟,尤其是关于控制算法和规则遵从性的验证方面
系统性地搜索罕见的功能缺陷,而不仅仅是驾驶测试公里数
功能
外部条件和规则的持续评估和适应
可靠地判断是否超出车辆自动化限制
尽早告知驾驶员自动驾驶模式的结束,以便其接管(L3)
如果驾驶员无法接管(L3),车辆将寻求安全停靠







最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
