




 广告
广告





















































百度Apollo限定场景低成本方案,迈向可量产之路
2018-06-07 11:01:01· 来源:佐思汽车研究

百度Apollo目前历经四代,分别是Apollo1.0、1.5、2.0、2.5。
百度Apollo目前历经四代,分别是Apollo1.0、1.5、2.0、2.5。
版本
1.0
简介
Initial release of Apollo implements autonomous GPS waypoint following.
自主驾驶基于GPS基准点跟随
特色
1、RTK定位
2、纵向标定表与横向LQR控制
3、增加GPS/IMU GNSS驱动
4、用HMI记录和回放车辆轨迹,用DreamView视觉化车辆轨迹
5、在模型和工具层面增加Debugging工具
1.5
This release supports that vehicles autonomously cruise on fixed lanes.
在固定路线上自主巡航
1、用GPU完成的激光雷达点云检测障碍物并追踪
2、用MLP预测模型和其他多种预测模型预测障碍物移动轨迹
3、交通规划模块,多次迭代DP(动态规划)和QP(二次规划)来优化路径和速度
4、端到端模块混合深度神经网络模型,横向控制采用FCNN,纵向控制采用LSTM
5、增加高清地图引擎APIs
6、增加Velodyne 64激光雷达驱动
7、在模型和工具层面增加Debugging工具
8、增强HMI与DreamView特色,允许实时交通场景回放
2.0
This release allows the ve-hicle to autonomously run on geo-fenced highways. Vehicles are able to do lane keeping cruise and avoid collisions with the leading vehicles.
在简单的城郊道路上自动驾驶
1、增加交通信号灯检测
2、增加障碍物分类器,分为车辆、行人、自行车和未知障碍物
3、升级换道规划
4、RTK与激光雷达点云融合定位
5、MPC模型预测法做控制算法
6、添加RNN模型做交通场景预测
7、集成HMI和DreamView
8、重新设计DreamView和debugging视觉化工具
9、通过安全OTA升级Docker镜像
10、增加USB摄像头和雷达驱动
2.5
This release allows the vehicle to autonomously run on geo-fenced highways. Vehicles are able to do lane keeping cruise and avoid collisions with the leading vehicles.
高速公路自动驾驶
1、基于多种传感器融合的定位
2、DreamView增加更多的视觉化特性
3、增加高精度地图数据采集工具
4、基于视觉的障碍物和车道线检测
5、增加实时相对地图,支持ACC和车道保持
Apollo一路走来,正在走出高成本的科研范畴,迈向实用领域。在Apollo1.5版上,激光雷达是最核心的,不仅完成传统的局部导航,还完成通常由摄像头完成的障碍物识别。2.0版上,增加交通信号灯检测和障碍物分类。RTK与激光雷达点云融合定位,MPC模型预测法做控制算法,RNN做交通场景预测。Apollo重点模块集中在障碍物感知、预测、高精度定位、路径规划、控制的工作。

这样一辆车,总成本100多万人民币(含改装成本),显然只能做科研,即使做共享出行,成本都太高了。
2.5版上,Apollo有了重大改变,从高成本科研阶段进入实用化的阶段,从以前的低速园区应用,演进到低成本方案的高速公路应用。在Github上Apollo2.5是这样说的 Vehicles with this version can drive autonomously on highways at higher speed with limited HD map support. The highway needs to have clear white painted lane marks with minimum curvatures. The performance of vision based perception will degrade significantly at night or with strong light flares.Be cautious when driving autonomously, Especially at night or in poor vision environment. Please test Apollo 2.5 with the support from Apollo engineering team. 在高精度地图支持下,车辆可以在高速公路上以较高的速度自动驾驶,高速公路应该车道线清晰,曲率不高。在强烈阳光和低照度下请谨慎,请在Apollo工程团队的支持下测试Apollo2.5。
和原来数十万元的系统成本相比,Apollo2.5仅用一个广角摄像头和一个毫米波雷达就完成了高速公路自动驾驶,总体成本下降了90%,已经具备量产条件。
Apollo2.5的基础是百度的低成本“相对地图”,这种地图和凯迪拉克超级巡航上的激光雷达地图类似。
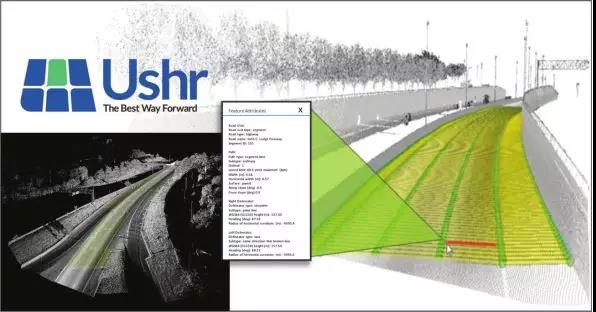
由USHR为凯迪拉克制作的激光雷达地图专为高速公路无人驾驶设计,地图的内容包括车道数量、车道宽度、水平宽度、速度上限、速度下限、海拔高度、顺坡斜率、边坡斜率、航向角、水平曲率半径等,精度为10厘米。在凯迪拉克超级巡航里包括6自由度的MEMS IMU,使用天宝的RTX服务和一台天宝的单频双星(GPS/GLONASS)接收机,使用4G通讯来矫正定位,包括精确卫星时钟,轨道和电离层信息,定位精度可达1.8米。
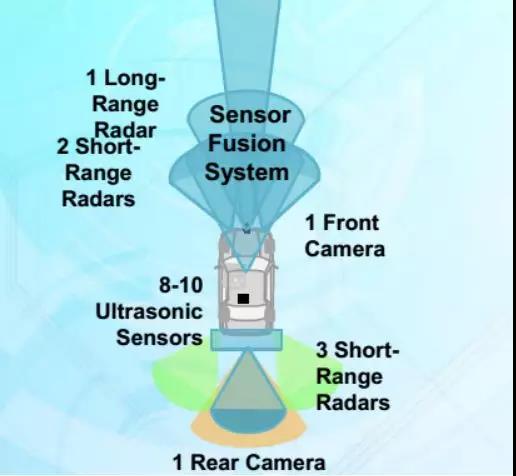
凯迪拉克使用6个毫米波雷达,包括1个长距超声波雷达,可能是德国大陆汽车的ARS-410,5个短距离毫米波雷达,可能是大陆的SRR520。前后两个摄像头也由大陆提供,8-10个超声波雷达,当然车内还有一个驾驶者状态监控摄像头。图中未标出360环视系统,实际上凯迪拉克超级巡航也有360环视系统。这套系统远优于特斯拉的Autopilot 2.5辅助驾驶系统。
中国的高速公路路况不同于美国,中国的高速公路有三大杀手,一是大货车,二是无视交通法规的司机,三是豪车飙车。对这三大杀手,必须做出对应,这就是场景决策或者说行为决策。大货车由于国情因素,超载是不可避免的,不超载就会亏本。超载情况下,刹车性能大幅度下降,加上大货车都是气刹,反应速度远低于小型车的液压刹车,此外大货车在高速上方向打的稍微急一点就可能翻车,会压垮临近车道的车。所以高速上尽量不跟大货车,尽量不与大货车平行。然而高速上也忌讳随意变道,或者见大车就超。需要在两者之间做一个平衡,找一个最优策略。
有些司机,在高速逆行或倒车,如果按照一般无人车的原则是遇到障碍物就减速,而面对逆行或倒车,减速不是最优策略,换道才是,不过也要看是否具备换道条件。最后是那些不在意超速罚款的豪车,四处穿插变道,任意超出,无人车要尽量远离这些车辆。
如何让无人车面对这些场景时做出最优选择?
行为决策,第一种方法为人为编程法(Manual Programing),包括FSM(Finite State Machines)有限状态机、行为树、目标导向、效用系统、Rule based、HSM(Hierarachical State Machines)层次状态机。
FSM有限状态机,这是目前AI游戏界最常用的方法,也是小公司无人驾驶最常用的,简单高效,最大的优点是可视化,缺点是无法对应太多的场景,一般不超过10个,在高速上场景比较简单,尚可使用,低速市区则完全不能用。
第二种是Optimisation最优法,包括CCO(Chance Control Optiminsation)。
第三种是Graph 搜索法,包括A+法(宝马),RRTS(快速扩展随机树法)。
第四种Model Predictive Control (MPC)法,例如Interactive Multi Model-Extended Kalman Filter (IMM-EKF)。
第五种Partially Observable Markov Decision Process (POMDP),部分可观察马尔科夫决策过程法,降低对传感器的依赖性。
Waymo使用POMDP来做行为决策,Waymo 的 behavior prediction team由Stephane Ross领导,主要用POMDP来预测行人、车辆和骑自行车者的未来行为。预测行为与行为决策是联为一体的。
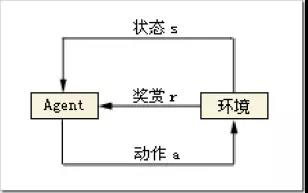
这实际上一种强化学习。深度学习算法一般可分为三大类,即非监督学习(unsupervised learning)、监督学习(supervised leaning)和强化学习。根据Agent当前状态,选择了动作a,这时与环境发生了交互,Agent观测到下一个状态,并收到了一定的奖赏r(有好有坏)。如此反复的与环境进行交互,在一定条件下,Agent会学习到一个最优/次优的策略。这实际上就是个马尔科夫决策过程(MDP),也就是阿尔法狗背后的算法。
而无人车的决策都来自传感器得到的信息,这些信息都不能完整地描述环境,只是环境的一部分,因此需要使用POMDP,即部分观察马尔科夫决策过程。强化学习过程可以使用一个马氏决策过程(M arkov decision process,MDP)表示,MDP由四元组<S,A,R ,T> 定义,其中S为状态集,A为动作集,R :SxA = R为奖赏函数,记R (s,a,st)为在状态 S下采用动作a到达st 后所得到的瞬间奖赏值;T:SxA = PD (为状态转移函数,其中T (s,a,st)为Agent在状态S下采用动作a到达st的概率…。
如果Agent在学习过程中,无需学习MDP的模型知识,直接学习最优策略, 我们称这类方法为模型无关(Model free) ;如果在学习过程中,先学习MDP的模型知识,然后再根据这些推导、学习出最优策略,我们称之为模型有关( Model based)。其中前者是研究的重点,因为在实际中主要遇到的问题。是如何在模型不知的情况下学习到最优策略。前者的算法主要有TD(λ), Q—learning 算法,后者主要有Dyna、Prioritized Sweeping、Sarsa 算法等。
无人车的POMDP一般包括状态建模、行为建模、观察建模、转移函数建模、收益建模。状态建模包括行人、车辆、骑车人可能的行为目标点,映射到POMDP模型的七元组的S。将汽车的行为,恒速、加速、减速、左转、右转组合为多种行为。将车辆位置、速度和周围移动目标的位置集合映射到POMDP模型的七元组的Z。汽车的收益建模包括安全、舒适、高效三个目标。
为了加快测试过程,百度开发了强大的仿真系统。在Apollo 中,对仿真平台的定位是不仅仅是真实,而是要能够进一步:能够发现无人车算法中的问题。因为在整个算法迭代闭环中,光有拟真是不够的,还需要能够发掘问题,发现了问题后才能去解决问题,也就是回到了开发过程。如此这样,从开发到仿真再回到开发,仿真平台同我们的开发过程串联成一个闭环。只有闭环的东西才能构成持续迭代和持续优化状态。所以仿真平台在整个无人车算法迭代中的地位非常重要。
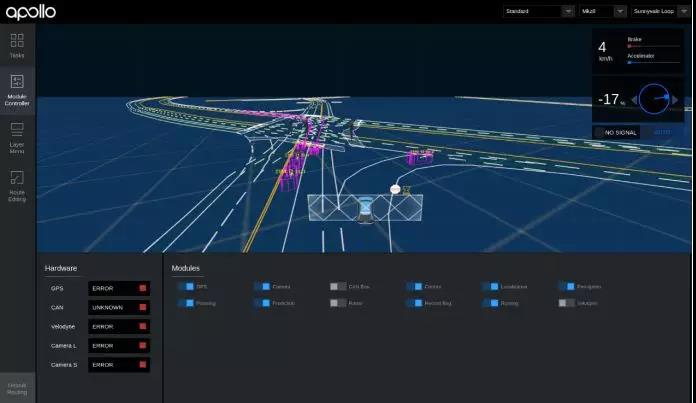
Apollo 仿真器的静态世界的表达,正是直接使用了 Apollo 相对地图数据。所以它是真实的,且是具有足够低成本的。
相对低速场景,高速公路场景要简单的多,更容易实现低成本可量产的无人驾驶。未来国内第一辆量产的L4无人车,很有可能是百度Apollo与中国本土车企打造的。
6月23日上海Apollo自动驾驶公开课介绍

2018年4月19日,Apollo平台重磅发布“一周年贺岁版”Apollo2.5,支持限定区域视觉高速自动驾驶,提供更多场景、更低成本、更高性能的能力支持,Apollo平台开发者真正所需,开放了视觉感知、实时相对地图、高速规划与控制三大能力以及更高效的开发工具,将助力开发者迅速起步,快速完成验证。值得一提的是,Apollo2.5带来了更低成本的解决方案,通过基于摄像头的视觉感知方案,传感器成本可较此前降低90%,大大降低了自动驾驶研发门槛。Apollo2.5版本还开放可视化的调试工具、Apollo高精地图数据采集器、Apollo云端仿真模拟器等更高效的开发工具,进一步提升开发者研发效率。
Apollo自动驾驶公开课第4期,即将于6月23日在上海举办,将引导自动驾驶开发者深入应用Apollo2.5。本次公开课邀请了百度自动驾驶事业部的资深工程师,以及Apollo的生态合作伙伴,一起与开发者们交流,快速掌握Apollo2.5的最新功能。参加阿波罗公开课,还能加入Apollo开发者的微信群,便于长期交流使用经验,迅速解决自动驾驶开发中的各种问题。

演讲嘉宾简介
杨凡 :百度自动驾驶事业部资深架构师,负责产品化解决方案。
演讲摘要:Apollo开放平台简介、Apollo能力开放简介、Apollo资源开放与研发迭代新模式、Apollo生态阶段性成果。
潘屹峰:百度无人车预测方向技术负责人。
演讲摘要:Apollo 2.5 预测系统设计思想和架构、策略介绍;预测系统研发过程中的一些思考;关于预测技术的现场交流。
朱帆:百度自动驾驶事业部架构师,负责决策规划多个核心算法。
演讲摘要:无人车决策规划是自动驾驶领域的核心技术之一,自Apollo 1.5开放以来收到了业界的广泛关注。
Apollo 2.5相对于之前版本向大家展示了另一种规划控制的设计思路 - Lattice Planner。
它有哪些区别?适用的场景有什么不同?本次演讲将对其框架、算法使用以及优势进行分享。
王欣可:青岛托尔泰克机器人有限公司技术总监,基于Apollo1.0开源框架实现了农业场景低速无人驾驶。
演讲摘要:随着Apollo 1.0开放了封闭园区循迹自动驾驶能力,向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,这让作为农业机器人开发者的我们看到了实现农业无人驾驶车的契机。基于Apollo我们做了哪些大胆的尝试?为什么Apollo+农业成为无人驾驶最佳应用场景?现场将面对面分享我们的适配过程。
栾宁:百度Apollo合作发展部 物流行业高级经理,负责Apollo生态合作&拓展。
演讲摘要:Apollo生态合作的模式,如何从场景、技术、资金等多方面赋能开发者,以及Apollo开放一年多以来,产生的优秀合作案例分享。
参会咨询
手机:18600021096 符兆国
邮箱:fuzhaoguo@jointwyse.com
版本
1.0
简介
Initial release of Apollo implements autonomous GPS waypoint following.
自主驾驶基于GPS基准点跟随
特色
1、RTK定位
2、纵向标定表与横向LQR控制
3、增加GPS/IMU GNSS驱动
4、用HMI记录和回放车辆轨迹,用DreamView视觉化车辆轨迹
5、在模型和工具层面增加Debugging工具
1.5
This release supports that vehicles autonomously cruise on fixed lanes.
在固定路线上自主巡航
1、用GPU完成的激光雷达点云检测障碍物并追踪
2、用MLP预测模型和其他多种预测模型预测障碍物移动轨迹
3、交通规划模块,多次迭代DP(动态规划)和QP(二次规划)来优化路径和速度
4、端到端模块混合深度神经网络模型,横向控制采用FCNN,纵向控制采用LSTM
5、增加高清地图引擎APIs
6、增加Velodyne 64激光雷达驱动
7、在模型和工具层面增加Debugging工具
8、增强HMI与DreamView特色,允许实时交通场景回放
2.0
This release allows the ve-hicle to autonomously run on geo-fenced highways. Vehicles are able to do lane keeping cruise and avoid collisions with the leading vehicles.
在简单的城郊道路上自动驾驶
1、增加交通信号灯检测
2、增加障碍物分类器,分为车辆、行人、自行车和未知障碍物
3、升级换道规划
4、RTK与激光雷达点云融合定位
5、MPC模型预测法做控制算法
6、添加RNN模型做交通场景预测
7、集成HMI和DreamView
8、重新设计DreamView和debugging视觉化工具
9、通过安全OTA升级Docker镜像
10、增加USB摄像头和雷达驱动
2.5
This release allows the vehicle to autonomously run on geo-fenced highways. Vehicles are able to do lane keeping cruise and avoid collisions with the leading vehicles.
高速公路自动驾驶
1、基于多种传感器融合的定位
2、DreamView增加更多的视觉化特性
3、增加高精度地图数据采集工具
4、基于视觉的障碍物和车道线检测
5、增加实时相对地图,支持ACC和车道保持
Apollo一路走来,正在走出高成本的科研范畴,迈向实用领域。在Apollo1.5版上,激光雷达是最核心的,不仅完成传统的局部导航,还完成通常由摄像头完成的障碍物识别。2.0版上,增加交通信号灯检测和障碍物分类。RTK与激光雷达点云融合定位,MPC模型预测法做控制算法,RNN做交通场景预测。Apollo重点模块集中在障碍物感知、预测、高精度定位、路径规划、控制的工作。
这样一辆车,总成本100多万人民币(含改装成本),显然只能做科研,即使做共享出行,成本都太高了。
2.5版上,Apollo有了重大改变,从高成本科研阶段进入实用化的阶段,从以前的低速园区应用,演进到低成本方案的高速公路应用。在Github上Apollo2.5是这样说的 Vehicles with this version can drive autonomously on highways at higher speed with limited HD map support. The highway needs to have clear white painted lane marks with minimum curvatures. The performance of vision based perception will degrade significantly at night or with strong light flares.Be cautious when driving autonomously, Especially at night or in poor vision environment. Please test Apollo 2.5 with the support from Apollo engineering team. 在高精度地图支持下,车辆可以在高速公路上以较高的速度自动驾驶,高速公路应该车道线清晰,曲率不高。在强烈阳光和低照度下请谨慎,请在Apollo工程团队的支持下测试Apollo2.5。
和原来数十万元的系统成本相比,Apollo2.5仅用一个广角摄像头和一个毫米波雷达就完成了高速公路自动驾驶,总体成本下降了90%,已经具备量产条件。
Apollo2.5的基础是百度的低成本“相对地图”,这种地图和凯迪拉克超级巡航上的激光雷达地图类似。
由USHR为凯迪拉克制作的激光雷达地图专为高速公路无人驾驶设计,地图的内容包括车道数量、车道宽度、水平宽度、速度上限、速度下限、海拔高度、顺坡斜率、边坡斜率、航向角、水平曲率半径等,精度为10厘米。在凯迪拉克超级巡航里包括6自由度的MEMS IMU,使用天宝的RTX服务和一台天宝的单频双星(GPS/GLONASS)接收机,使用4G通讯来矫正定位,包括精确卫星时钟,轨道和电离层信息,定位精度可达1.8米。
凯迪拉克使用6个毫米波雷达,包括1个长距超声波雷达,可能是德国大陆汽车的ARS-410,5个短距离毫米波雷达,可能是大陆的SRR520。前后两个摄像头也由大陆提供,8-10个超声波雷达,当然车内还有一个驾驶者状态监控摄像头。图中未标出360环视系统,实际上凯迪拉克超级巡航也有360环视系统。这套系统远优于特斯拉的Autopilot 2.5辅助驾驶系统。
中国的高速公路路况不同于美国,中国的高速公路有三大杀手,一是大货车,二是无视交通法规的司机,三是豪车飙车。对这三大杀手,必须做出对应,这就是场景决策或者说行为决策。大货车由于国情因素,超载是不可避免的,不超载就会亏本。超载情况下,刹车性能大幅度下降,加上大货车都是气刹,反应速度远低于小型车的液压刹车,此外大货车在高速上方向打的稍微急一点就可能翻车,会压垮临近车道的车。所以高速上尽量不跟大货车,尽量不与大货车平行。然而高速上也忌讳随意变道,或者见大车就超。需要在两者之间做一个平衡,找一个最优策略。
有些司机,在高速逆行或倒车,如果按照一般无人车的原则是遇到障碍物就减速,而面对逆行或倒车,减速不是最优策略,换道才是,不过也要看是否具备换道条件。最后是那些不在意超速罚款的豪车,四处穿插变道,任意超出,无人车要尽量远离这些车辆。
如何让无人车面对这些场景时做出最优选择?
行为决策,第一种方法为人为编程法(Manual Programing),包括FSM(Finite State Machines)有限状态机、行为树、目标导向、效用系统、Rule based、HSM(Hierarachical State Machines)层次状态机。
FSM有限状态机,这是目前AI游戏界最常用的方法,也是小公司无人驾驶最常用的,简单高效,最大的优点是可视化,缺点是无法对应太多的场景,一般不超过10个,在高速上场景比较简单,尚可使用,低速市区则完全不能用。
第二种是Optimisation最优法,包括CCO(Chance Control Optiminsation)。
第三种是Graph 搜索法,包括A+法(宝马),RRTS(快速扩展随机树法)。
第四种Model Predictive Control (MPC)法,例如Interactive Multi Model-Extended Kalman Filter (IMM-EKF)。
第五种Partially Observable Markov Decision Process (POMDP),部分可观察马尔科夫决策过程法,降低对传感器的依赖性。
Waymo使用POMDP来做行为决策,Waymo 的 behavior prediction team由Stephane Ross领导,主要用POMDP来预测行人、车辆和骑自行车者的未来行为。预测行为与行为决策是联为一体的。
这实际上一种强化学习。深度学习算法一般可分为三大类,即非监督学习(unsupervised learning)、监督学习(supervised leaning)和强化学习。根据Agent当前状态,选择了动作a,这时与环境发生了交互,Agent观测到下一个状态,并收到了一定的奖赏r(有好有坏)。如此反复的与环境进行交互,在一定条件下,Agent会学习到一个最优/次优的策略。这实际上就是个马尔科夫决策过程(MDP),也就是阿尔法狗背后的算法。
而无人车的决策都来自传感器得到的信息,这些信息都不能完整地描述环境,只是环境的一部分,因此需要使用POMDP,即部分观察马尔科夫决策过程。强化学习过程可以使用一个马氏决策过程(M arkov decision process,MDP)表示,MDP由四元组<S,A,R ,T> 定义,其中S为状态集,A为动作集,R :SxA = R为奖赏函数,记R (s,a,st)为在状态 S下采用动作a到达st 后所得到的瞬间奖赏值;T:SxA = PD (为状态转移函数,其中T (s,a,st)为Agent在状态S下采用动作a到达st的概率…。
如果Agent在学习过程中,无需学习MDP的模型知识,直接学习最优策略, 我们称这类方法为模型无关(Model free) ;如果在学习过程中,先学习MDP的模型知识,然后再根据这些推导、学习出最优策略,我们称之为模型有关( Model based)。其中前者是研究的重点,因为在实际中主要遇到的问题。是如何在模型不知的情况下学习到最优策略。前者的算法主要有TD(λ), Q—learning 算法,后者主要有Dyna、Prioritized Sweeping、Sarsa 算法等。
无人车的POMDP一般包括状态建模、行为建模、观察建模、转移函数建模、收益建模。状态建模包括行人、车辆、骑车人可能的行为目标点,映射到POMDP模型的七元组的S。将汽车的行为,恒速、加速、减速、左转、右转组合为多种行为。将车辆位置、速度和周围移动目标的位置集合映射到POMDP模型的七元组的Z。汽车的收益建模包括安全、舒适、高效三个目标。
为了加快测试过程,百度开发了强大的仿真系统。在Apollo 中,对仿真平台的定位是不仅仅是真实,而是要能够进一步:能够发现无人车算法中的问题。因为在整个算法迭代闭环中,光有拟真是不够的,还需要能够发掘问题,发现了问题后才能去解决问题,也就是回到了开发过程。如此这样,从开发到仿真再回到开发,仿真平台同我们的开发过程串联成一个闭环。只有闭环的东西才能构成持续迭代和持续优化状态。所以仿真平台在整个无人车算法迭代中的地位非常重要。
Apollo 仿真器的静态世界的表达,正是直接使用了 Apollo 相对地图数据。所以它是真实的,且是具有足够低成本的。
相对低速场景,高速公路场景要简单的多,更容易实现低成本可量产的无人驾驶。未来国内第一辆量产的L4无人车,很有可能是百度Apollo与中国本土车企打造的。
6月23日上海Apollo自动驾驶公开课介绍
2018年4月19日,Apollo平台重磅发布“一周年贺岁版”Apollo2.5,支持限定区域视觉高速自动驾驶,提供更多场景、更低成本、更高性能的能力支持,Apollo平台开发者真正所需,开放了视觉感知、实时相对地图、高速规划与控制三大能力以及更高效的开发工具,将助力开发者迅速起步,快速完成验证。值得一提的是,Apollo2.5带来了更低成本的解决方案,通过基于摄像头的视觉感知方案,传感器成本可较此前降低90%,大大降低了自动驾驶研发门槛。Apollo2.5版本还开放可视化的调试工具、Apollo高精地图数据采集器、Apollo云端仿真模拟器等更高效的开发工具,进一步提升开发者研发效率。
Apollo自动驾驶公开课第4期,即将于6月23日在上海举办,将引导自动驾驶开发者深入应用Apollo2.5。本次公开课邀请了百度自动驾驶事业部的资深工程师,以及Apollo的生态合作伙伴,一起与开发者们交流,快速掌握Apollo2.5的最新功能。参加阿波罗公开课,还能加入Apollo开发者的微信群,便于长期交流使用经验,迅速解决自动驾驶开发中的各种问题。
演讲嘉宾简介
杨凡 :百度自动驾驶事业部资深架构师,负责产品化解决方案。
演讲摘要:Apollo开放平台简介、Apollo能力开放简介、Apollo资源开放与研发迭代新模式、Apollo生态阶段性成果。
潘屹峰:百度无人车预测方向技术负责人。
演讲摘要:Apollo 2.5 预测系统设计思想和架构、策略介绍;预测系统研发过程中的一些思考;关于预测技术的现场交流。
朱帆:百度自动驾驶事业部架构师,负责决策规划多个核心算法。
演讲摘要:无人车决策规划是自动驾驶领域的核心技术之一,自Apollo 1.5开放以来收到了业界的广泛关注。
Apollo 2.5相对于之前版本向大家展示了另一种规划控制的设计思路 - Lattice Planner。
它有哪些区别?适用的场景有什么不同?本次演讲将对其框架、算法使用以及优势进行分享。
王欣可:青岛托尔泰克机器人有限公司技术总监,基于Apollo1.0开源框架实现了农业场景低速无人驾驶。
演讲摘要:随着Apollo 1.0开放了封闭园区循迹自动驾驶能力,向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,这让作为农业机器人开发者的我们看到了实现农业无人驾驶车的契机。基于Apollo我们做了哪些大胆的尝试?为什么Apollo+农业成为无人驾驶最佳应用场景?现场将面对面分享我们的适配过程。
栾宁:百度Apollo合作发展部 物流行业高级经理,负责Apollo生态合作&拓展。
演讲摘要:Apollo生态合作的模式,如何从场景、技术、资金等多方面赋能开发者,以及Apollo开放一年多以来,产生的优秀合作案例分享。
参会咨询
手机:18600021096 符兆国
邮箱:fuzhaoguo@jointwyse.com







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
