




 广告
广告





















































下一代的车辆控制系统
2018-07-10 21:37:11· 来源:智车科技

“钱学森国际杰出科学家系列讲座”在中科院自动化研究所举办。本期讲座邀请到加拿大滑铁卢大学Amir Khajepour作题为“Next Generation of VehicleControl Systems”的报告。报告着眼于汽车控制系统的发展和目前汽车工业面临的挑战。
“钱学森国际杰出科学家系列讲座”在中科院自动化研究所举办。本期讲座邀请到加拿大滑铁卢大学Amir Khajepour作题为“Next Generation of VehicleControl Systems”的报告。报告着眼于汽车控制系统的发展和目前汽车工业面临的挑战。随着汽车通信、自主驾驶、传感系统和人工智能的快速变化,要求在车辆控制系统中采取更全面的方法来处理未来和当前新的发展。Amir Khajepour教授介绍了目前在机电车辆系统中用于开发下一代车辆控制系统的路线图。事例和道路试验结果表明,新的整体性方法可以提高车辆的安全性,减少开发时间和误差。
嘉宾简介:

Amir Khajepour教授担任车辆机电一体化领域的Tier-1 Canada Research Chair 以及在加拿大自然科学与工程研究理事会(NSERC)、通用汽车(General Motors)担任资深的整体车辆控制领域的研究主席。Amir Khajepour教授在几个关键的多学科领域开展了广泛的研究计划。他发表了超过450篇论文和会议出版物,8本专业书籍,并发表了许多主题演讲。他是加拿大工程研究院(Engineering Institute of Canada)院士、美国机械工程师学会(American Society of Mechanical Engineering)会士和加拿大机械工程师学会(Canadian Society of Mechanical Engineering)会士,并担任Journal of Mechatronics、International Journal of Vehicle Autonomous Systems、International Journal of Powertrain副主编。
报告内容:
主持人王飞跃教授:
Amir Khajepour 是加拿大滑铁卢大学的教授。滑铁卢大学与国内高校不同,其要求学生在校学习一年后外出实习一年,这是全北美唯一一所实行这种学制的大学。虽然学校创建时间相对较晚,于1957年成立,但这种独特的学制要求使得学校所培养的学生倍受公司青睐。同时,学校很多毕业生现在都在硅谷工作或创业,比如自动驾驶卡车公司。
他是加拿大工程研究院(Engineering Institute of Canada)院士、美国机械工程师学会(American Society of Mechanical Engineering)会士和加拿大机械工程师学会(Canadian Society of Mechanical Engineering)会士,并担任Journal of Mechatronics(机电一体化)、International Journal of Vehicle Autonomous Systems(国际汽车自主系统)、International Journal of Powertrain(动力传动系统国际期刊)的副主编。他主要进行汽车动力学、车辆控制系统等方面的研究工作,并且在相关领域中发表了非常多的文章。
今天他为我们带来的报告题目是 Next Generation of Vehicle Control Systems,大家掌声欢迎Amir Khajepour 教授。
主讲嘉宾:
非常感谢王教授的介绍,很荣幸能够来到这里针对我在下一代车辆控制系统方面的研究工作进行报告。
今天,我想首先介绍一下我在滑铁卢大学所负责的实验室,接着针对车辆控制系统(Vehicle Control Systems)方面研究的主要挑战以及下一代车辆控制系统的研究原因进行阐述,最后具体展示为应对和解决这些挑战而进行的相关工作。

我所管理的机电车辆系统实验室(Mechatronic Vehicle Systems Laboratory)拥有包括博士、技术员、博士后等在内的研究人员约40-50人,他们分别负责不同的研究项目。所进行的工作内容不仅限于理论研究,而是涵盖从理论研究到模型设计再到量化生产以及测试设施和实验测试等全部研究流程范畴。此外,实验室还拥有如上图所示的测试车辆。实验室面向所有类型的交通运输工具进行研究,不论是传统车辆还是全电式车辆,或是用于电力管理与控制研究的大型运输卡车,以及用于新技术开发的新型城市车辆。
所以我们的研究工作简单来说就是,提出并探究一些新的想法或概念,将其转化为实体形式并应用于实际车辆进行全面测试。上图就是目前实验室所拥有的一些测试车辆(test vehicles)。
目前,实验室致力于研发能够完全由车辆进行自主驾驶及控制的高性能车辆(new high performance vehicle),即性能达到饱和水平的车辆。例如,我们将一辆SUV(Sport Utility Vehicle,运动型多用途汽车)改造为600马力(1公制马力=75千克力·米/秒=735瓦特、1英制马力=550英尺·磅/秒=745.7瓦特)的全电动轿车,其能够以50英里/小时-60英里/小时的速度进行自主行驶。同时,这辆车可进行与小型轿车同等程度的测试。
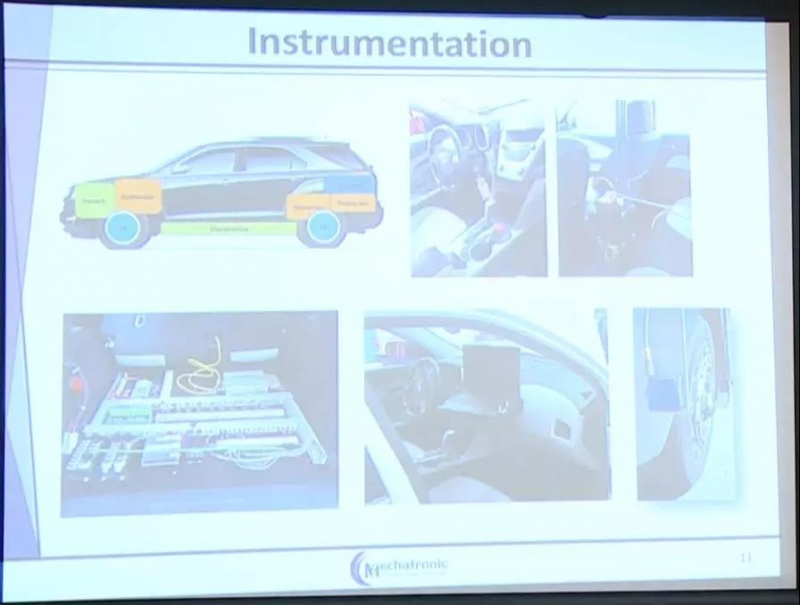
从上图中可以看到,所有测试车辆的车载装置(instrumentation)都配备齐全,使车辆能够进行各种类型的所需测试。
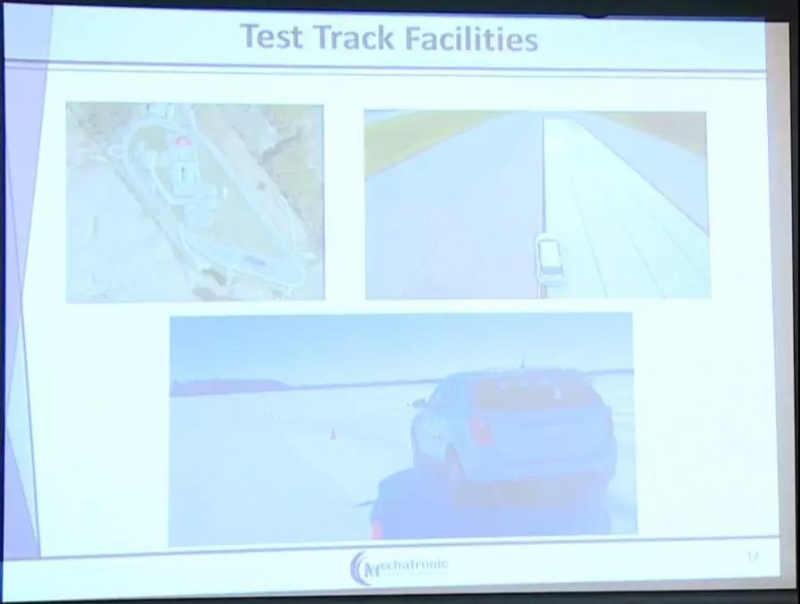
现在我们看到的是测试跑道设施(test track facilities)。左上角的测试跑道在学校附近,用于车辆大部分的本地测试。右上角是位于美国米尔福德市的跑道设施,其用于通用模型车的相关测试,图中展示的是路面对比测试路段。下图展示的是车辆在英国金罗斯市进行冬季测试。
背景
Background
接下来我将进入报告主体部分——车辆控制。
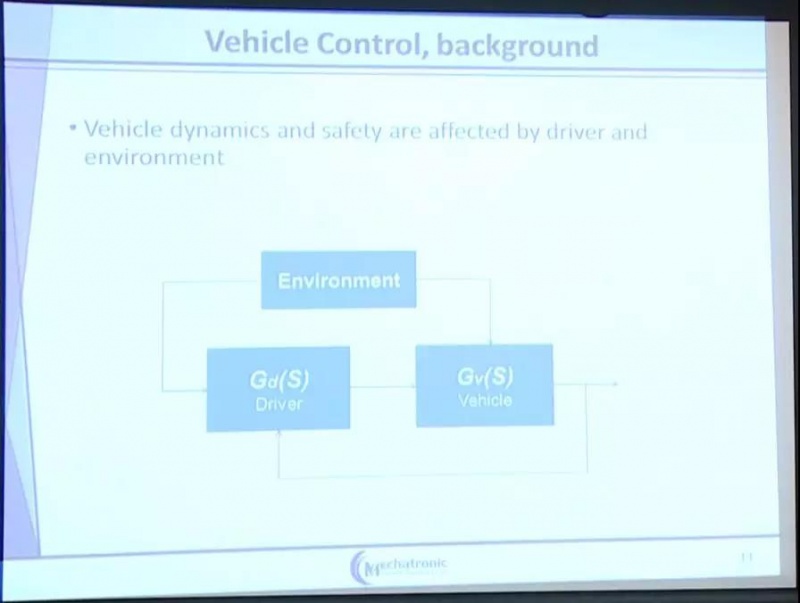
从整体来看,一辆车(vehicle)就相当于一个控制系统,车辆的行驶就像控制器的运行。驾驶员(driver)在驾驶车辆时会对周围环境进行观察,例如路面状况、视野内的可见物体等,并给车辆发送相应的信号,即施加给方向盘、刹车和油门的操作信号。随后,驾驶员通过眼睛和耳朵等感知器官接收车辆产生的状态反馈信号,进行相应的控制调整。
环境(environment)能够对驾驶员和车辆同时产生影响。如果道路状况较差,那么车辆可能不会对控制操作做出精准的反应,或者驾驶员的驾驶行为可能会发生变化。所以环境是影响车辆控制系统的噪声和干扰的一部分。
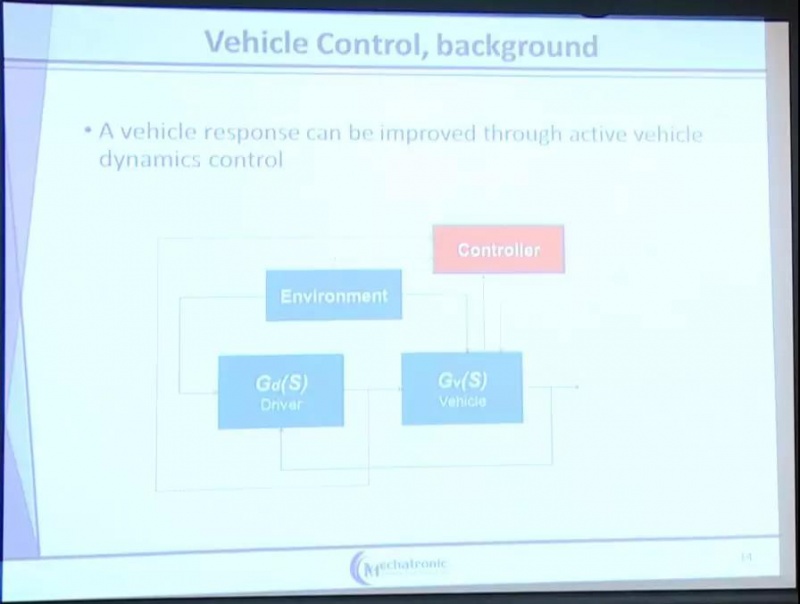
而在车辆中加入控制器(controller)后,就能够实现对车辆故障或难以控制状况的调整。控制器通过环境输入获知行驶环境路况,同时通过驾驶员的输入了解驾驶操作状态。控制器通常还需根据车辆自身的行驶状况,例如转向角、制动转矩或牵引转矩等信息,向车辆反馈相应的信号,从而调整驾驶员的驾驶行为。
事实上,主动控制系统引入车辆的历史并不长。17世纪之前,所有车辆的行驶都仅依赖于驾驶员的操作控制,人类是车内唯一的控制器。在那之后,车辆控制系统中开始加入一些被动的安全装置,比如安全带(seat belts)。
17世纪以后,市面上出现了包括主动安全系统在内的新型设备装置。首先是在1978年出现的防抱死刹车系统(Anti-lock Braking System, ABS),其作用是当刹车踏板被用力踩下或车辆在结冰的地面上制动时,确保车轮不会被完全抱死锁住。随后在1980年,出现了能够对车身变化进行更好地控制的主动或半主动悬架系统(Active/semi-active suspension system)。1987年的牵引力控制系统(traction control system, TCS)用于防止车辆在起动或加速时出现的车轮打滑等现象。其后,1995年面世的车身电子稳定程序(Electronic Stability Program, ESP)可以通过在车辆一侧采取制动措施使车身产生转动以控制车辆的移动。在那之后,2004年的主动前轮转向(Active Front Steering, AFS)能够调整转向角度来防止某些事故的发生。
目前市面上任何类型的车辆,都至少拥有最低标准数量的车辆动力学控制系统(Vehicle Dynamics Control System, VDC)。同时,无论是用于安全系统还是其他系统中,不同用途的微处理器数量都在迅速增多,这使得车辆变成了“车轮上的计算机”。而能够在这些“计算机”上进行驾驶操作,主要归功于大量存在于其中的处理元件和应用程序。
挑战
Challenges
现在的问题是,这些加入到车辆中的主动控制系统都是相对独立的组件。车辆所需的不同系统组件可能需要分别从不同的公司购买,同时这些组件以及控制器之间还需要进行匹配,以确保它们能够顺利地协同工作。在这个过程中,汽车公司为保证不同控制系统能够顺利协调运行,构建了许多查找表和事件库,导致耗费了大量的时间和资金。
而车辆控制系统的复杂度在未来将会进一步增加,其主要与驾驶员辅助系统(Driver Assistance System, DAS)和自主驾驶(Autonomous Driving)有关,例如增加新型传感器、路径规划和跟踪功能以及越来越多的程序代码和控制算法。同时,除了车辆能够自主获取的信息外,所用信息还来自于物联网(Internet of Things, IoT),其使得所有事物间都可以进行信息交互。与此同时,所获得的大量信息需要进行有效利用,这就引入了信息融合(information fusion)这一复杂度。此外,连通的车辆(connected vehicle)间可以进行沟通交互,这意味着一辆车能够获得其附近所有车辆的信息。车辆与其他车辆、基础设施甚至所有的事物的信息交互使得系统变得异常复杂,所以现在的问题是,该如何利用这些复杂信息?
这些挑战要求我们采用全新的思路对车辆控制进行研究。首先,需要一个能够解决系统现存和潜在复杂度问题的平台。平台能够将现有系统与无人驾驶、物联网等新技术进行无缝整合,但要避免系统间引发冲突或危险情况。同时,要确保消除由不同系统冲突指令所导致的风险。此外,需研发可应用于所有不同类型车辆的控制器,在降低系统整体成本的同时不增加可能发生冲突故障的组件。
整体车辆控制
Holistic Vehicle Control
所以我们提出了整体车辆控制(Holistic Vehicle Control)方法。车辆应配备牵引力控制(traction control)、扭矩矢量控制(torque vectoring)、主动转向(active steering)、差动制动(differential braking)和节气门控制(throttle control)等常规车辆控制系统,以及电源管理(power management)、悬架控制(suspension control)、传动控制(transmission control)、电子限滑差速器控制(Electronic Limited Slip Differential control, ELSD)等系统。
除添加驾驶辅助系统(Driving Assistance Systems, DAS)和自主驾驶的感知层(perception layer)外,为实现驾驶辅助和无人驾驶,还需在现有基础上安装许多新传感器,包括摄像机(cameras)、GPS、雷达(radars)、激光雷达(lidars)等。
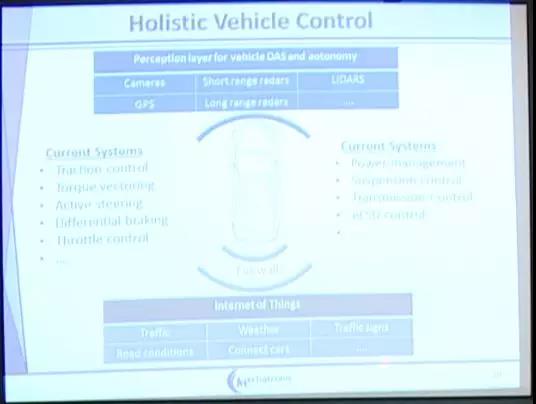
与此同时,我们利用物联网技术为车辆提供大量的新信息。也就是说,车辆与周围其他设备进行交互以获取交通流量、道路状况、天气情况等信息。在了解各系统的工作原理之后,我们就可以对车辆进行良好的控制。
主要目标
Main Goals
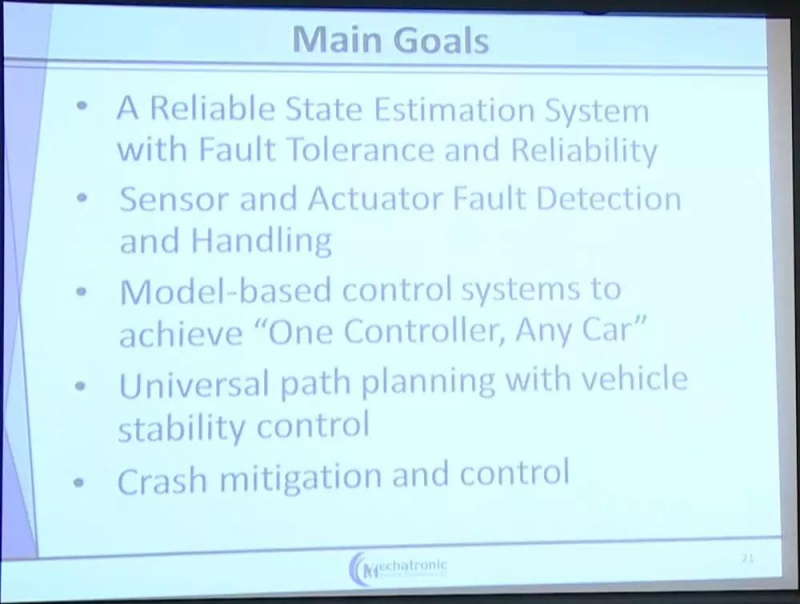
那么,为构造安全可靠且可控性强的车辆,需要进行哪些工作呢?显然,首先是车辆状态估计,因为车中所有的状态和参数信息不可能都通过传感器进行获取。例如,用于控制车轮滑动状况的实际车速,事实上其测量并不容易。其次,传感器和执行器的容错检测和处理也非常重要。人类可以通过多种途径感知车辆的噪音、震动或其他状态,但无人车该如何在传感器发生故障时获知车辆的状态信息呢?另外,我们应该确保所有的行驶情况都基于模型库,而不是查找表或者事件库。只有通过这种方式,车辆行驶状况才能被更合理地解释、拓展和优化。同时,车辆也非常需要一个可以应对不同情况的通用路径规划系统。最后,当发生车辆碰撞事故时,自主驾驶系统为减轻事故损失而采取的措施也是研究内容之一。以上这些就是我们在研究车辆控制系统时想要实现的主要目标。
接下来我将介绍一些我们已完成的研究,并展示一些相关的示例。
主要目标——一种具有容错性和可靠性的可靠状态估计系统
Main Goals: A Reliable State Estimation System with Fault Tolerance and Reliability
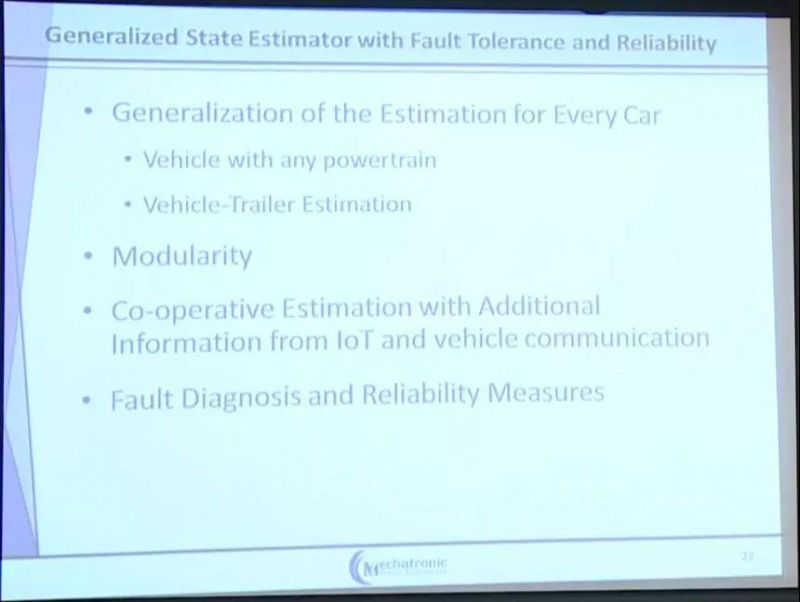
当谈到具有容错能力和可靠性的一般状态估计(generalstate estimation with fault tolerance and reliability)时,我们首先要确保所有具有动力系统(powertrain)和拖车结构(trailer)车辆的正常运行,所以需对车辆中的所有状态和参数进行可靠的估计。其次,估计系统的模块化(modularity)使得系统的添加变得更容易。同时,协同估计(cooperative estimation)也非常重要。我们希望通过车辆间的信息交互以及额外数据的融合进一步提高估计系统的性能。并且,估计系统需要进行故障诊断和可靠性衡量(fault diagnosis and reliability measures),这有助于确保系统性能足够良好。
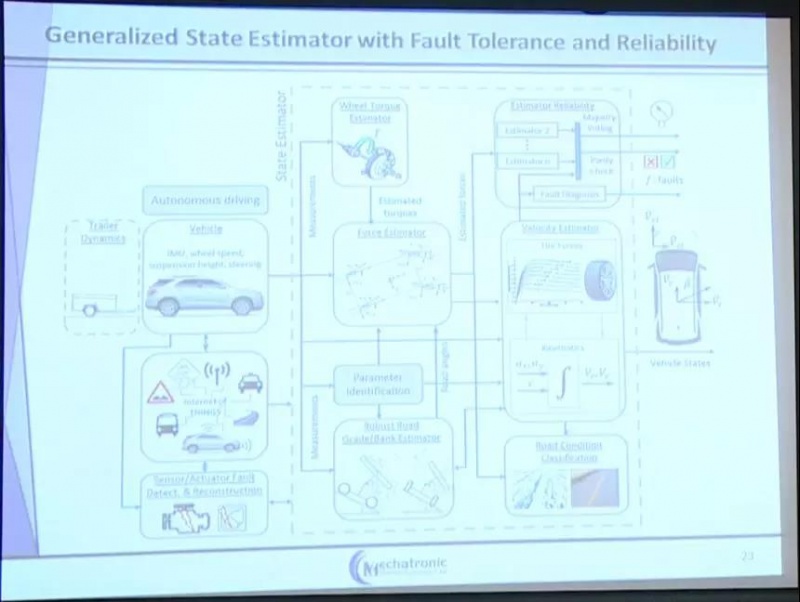
这是一幅估计系统的结构总图(general diagram),假设现在有一辆车(左侧中部)和大量传入车辆的信息。所有来自图中左下角故障检测和重构部分(Sensor/Actuator Fault Detect & Reconstruction)以用于执行器和传感器运行情况诊断的信号以及来自物联网模块(Internet of Things)的额外信息,都将输入到右侧的一般状态估计模块(State Estimator)。系统都需要进行哪些信息估计呢?
首先,从图片的顶部车轮扭矩估计模块(Wheel Torque Estimator)开始,我们需要了解施加于每个车轮的扭矩,以确定车轮没有出现打滑或锁住的现象。接下来,力估计模块(Force Estimator)会对坡度和倾角进行估计。如果存在一定的坡度或倾角,则需通过图中底部的道路检测模块(Robust Road Grade/Bank Estimator)检测和估计行驶路况,并且右侧中部的速度估计模块(Velocity Estimator)将测量每个车轮的速度。最后,图片右上角的估计可靠性模块(Estimator Reliability)会衡量所有已完成估计的可靠性,并将所得结果信息返回控制系统,使其能够对控制器进行相应的操控。
下面是部分测试结果。测试通过极端不理想的行驶路况来观察车辆的估计结果,同时车辆需尽量保持稳定车速。在测试过程中,车辆以环形路线在干燥的沥青路面(dry asphalt)和湿滑的沥青路面(wet asphalt)上交替行驶,与此同时分别对其在两种道路上行驶的纵向速度(longitudinal velocity, vx)和横向速度(lateral velocity,vy)变化进行估计。测试结果如上图,图中的两条曲线分别代表GPS数据和估计数据。可以看到,系统对车辆实际状况的估计结果准确度非常高。
主要目标——传感器和执行器的故障检测和处理
Main Goals: Sensor and Actuator Fault Detection and Handling
针对传感器的失灵或故障现象,我们构建了一个可重构车辆容错控制系统(reconfigurable fault-tolerant vehicle control system),并将其添加在图中左上角的驾驶员输入之后。系统在接收到传感器失灵或故障的信号后,必须确保能够检测到对应传感器,并通过其他传感器对其进行重构。
你可能会问,如何对传感器进行重构?实际上车辆中存在一些附加的传感器,其主要为惯性测量单元(Inertial Measurement Unit, IMU),其能够通过纵向速度(longitudinal acceleration)ax、横向加速度(lateral acceleration)ay和角速度(yaw rate)对某些传感器进行重构。
接下来我以横向加速度ay传感器的检测和重构为例进行具体说明。在图中,蓝黑红三色曲线分别表示横向加速度的实际数值、重构数值和测量数值。当传感器在2秒时发生故障导致检测信号丢失后,系统利用其他的传感器重构所得信号的准确度较高。所以,即使在失去传感器检测信号的情况下,系统依然可以获得良好的重构信号。
现在再来看刚才这个示例的容错估计研究(fault tolerant estimation)。上面四幅图分别是左前(Front Left, FL)、右前(Front Right, FR)、左后(Rear Left, RL)和右后(Rear Right,RR)四个车轮侧向力估计(Lateral Tire Force Estimation)的对照实验结果,图中的蓝黑红三色曲线分别表示轮胎侧向力的实际信号、重构信号和测量信号。显然可以看到,非容错系统只能给出具有较大误差的故障信号(fault signal),而重构信号则能够得到各车轮侧向力的准确数值。
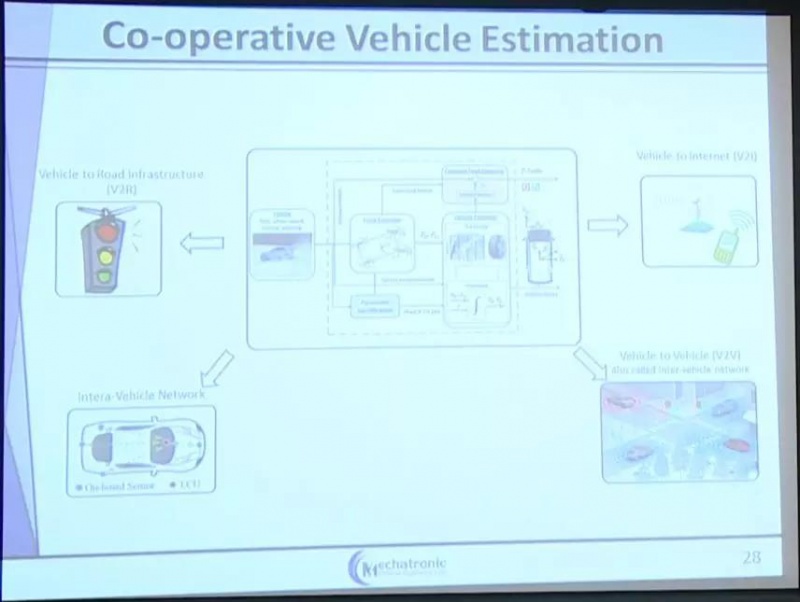
另外,我们的研究工作还包括利用外界信息对估计结果进行完善。这些信息可能来自V2R(Vehicle to Road Infrastructure)、物联网或V2V(Vehicle to Vehicle),但是该如何使用这些信息进行估计的优化呢?在拥有系统内置估计的情况下,我们需要将数据融合以优化估计。
在研究网络通信的整体概念后,我们将其理论引入估计结果的提高研究中,并将车辆的通信网络分为车辆内网络(Intra-Vehicle Network)和车辆间网络(Inter-Vehicle Network)。
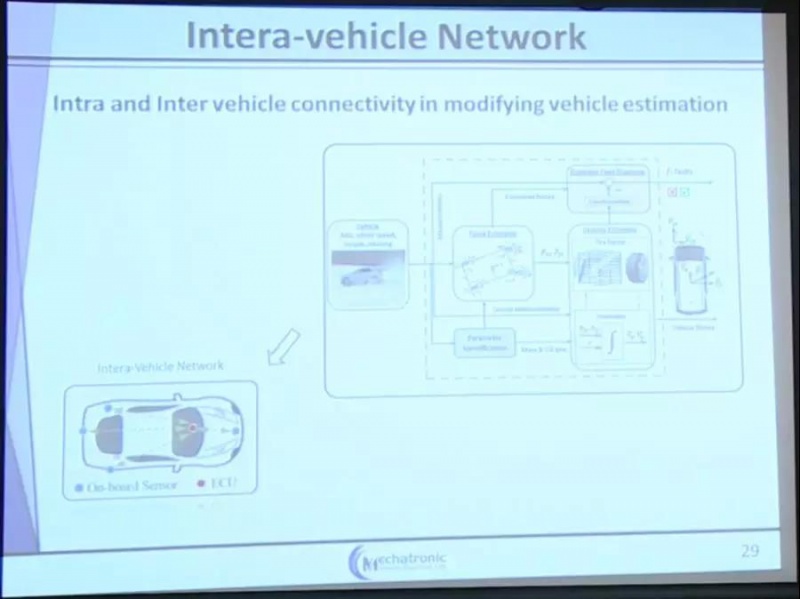
通过车辆内网络,车辆中不同位置的度量值可用于同一位置估计结果的完善。例如位于图片左下角的这辆车,其四个车轮都与车身相连。由于车辆整体的刚体运动,车轮所在四个角的速度映射到车辆中心位置都应得到相同的结果,这就是网络通信的相同理论。
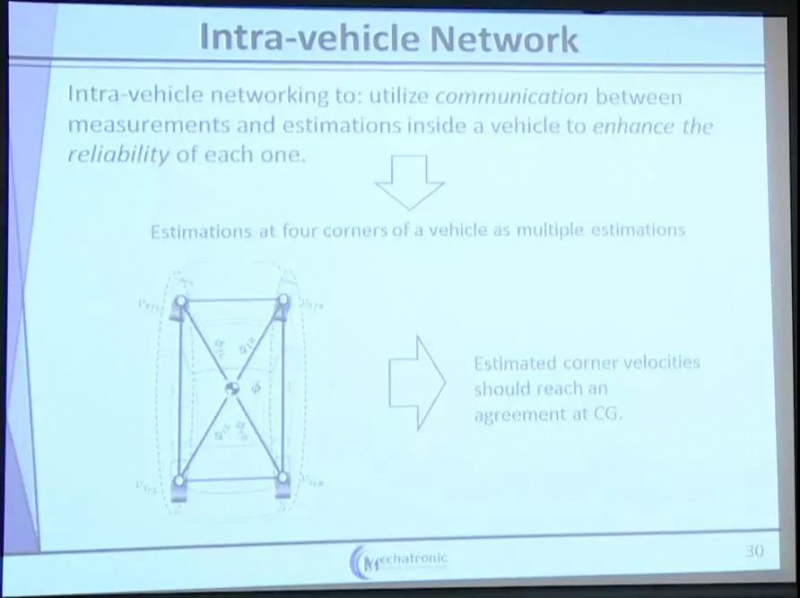
利用这个理论,车辆每个角车轮的速度数据可以通过车辆内网络传到中心位置,同时根据舆论动力学(opinion dynamics)提高中心位置估计结果的可靠性。所以即使某个车轮提供的是错误数据,中心位置的状态仍可通过其他车轮的数值进行估计,并返回给车辆的每个角调整车轮状态。
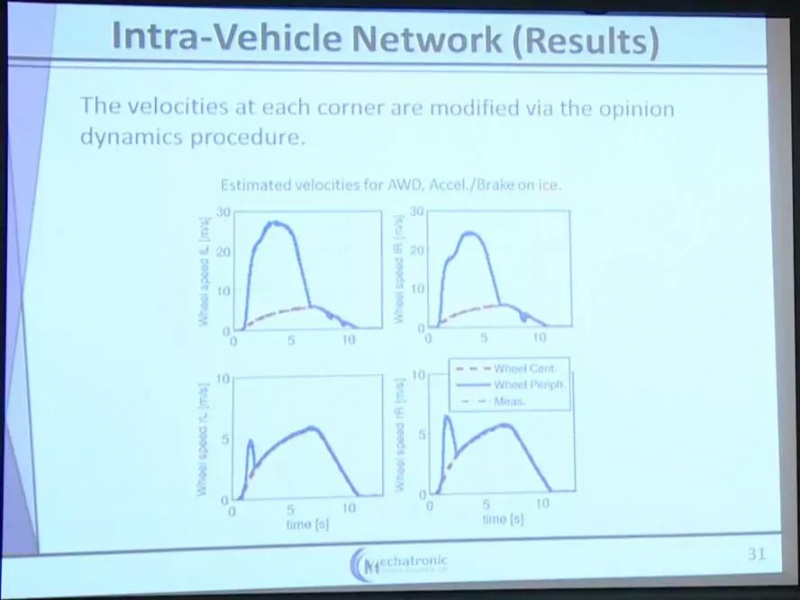
上图是在冰面上的加速和制动测试所得部分结果,四张图分别代表车辆四个车轮的数据,研究对象是车轮中心的速度。蓝色和红色的曲线分别描述传感器实际测得车轮外围(Wheel Peripheral)和车轮中心(Wheel Peripheral)的速度,黑色曲线是通过车辆内网络计算所得数值(Measure)。
这是一项很难进行的测试,特别是当车轮旋转或锁住时。车轮外围速度在第一行两幅图中与车轮中心速度的偏差说明车轮出现打滑失控现象,在下方两图中则出现速度突增现象,而利用车辆内网络则能够实现对车轮中心速度的无偏差准确估计。
车辆间网络(Inter-Vehicle Network)的通信情况也是相似的。每一辆车的通信都依照现行最新标准。
利用通信线路的专用短程通信技术(Dedicated Short Range Communications, DSRC),所有车辆都能够实现信息传送。其中,根据SAE J2735标准,车辆能够向外界发送包含临时车辆ID(temporal vehicle ID)、车辆的纬度、经度和海拔(latitude,longitude and elevation of the vehicle)、纵向速度(longitudinalvelocity)、纵向加速度(lateral acceleration)、制动系统状态(brake system status)以及车辆大小尺寸(vehicle size)等在内的信息。利用这些信息可进行有针对性的车辆碰撞减缓处理,所以车辆具体信息的获取对状态估计和无人驾驶来说都非常重要。
可以想象车辆现在处于一个网络中,网络中的每一个节点都在向其传送信息。根据从每个节点获得的信息能够对现有信息进行完善,随后再将更新后的信息传回其他车辆。甚至,可以利用这些信息根据舆论动力学向指定车辆发送信息,以完善车辆的状态估计。这就是我们所采用的信息融合方法。
上图就是车辆间网络的整个信息交互过程。图中最上方的车辆接收其他车辆所发送的速度及其他信息,进行自身状态估计的完善,同时,其也向其他车辆发送信息,使车辆了解各自的状态估计情况。以上就是状态估计方面的研究工作。
主要目标——基于模型的控制系统以实现“一个控制器应对所有车辆”
Main Goals: Model-based Control Systems to Achieve“One Controller, Any Car”
此外,我们希望开发一种可应用于所有车辆的通用整体车辆控制系统(Holistic Vehicle Control System)。其能够兼容任何类型的执行器,实现执行器和传感器的容错,并在任何路况下都始终保持鲁棒性。同时根据未来发展趋势,其还应具有嵌入式电源管理系统(embedded power management system),并能够实现通用路径规划(universal path planning)和无人驾驶领域研究中日益重要的碰撞缓解(crash mitigation)。
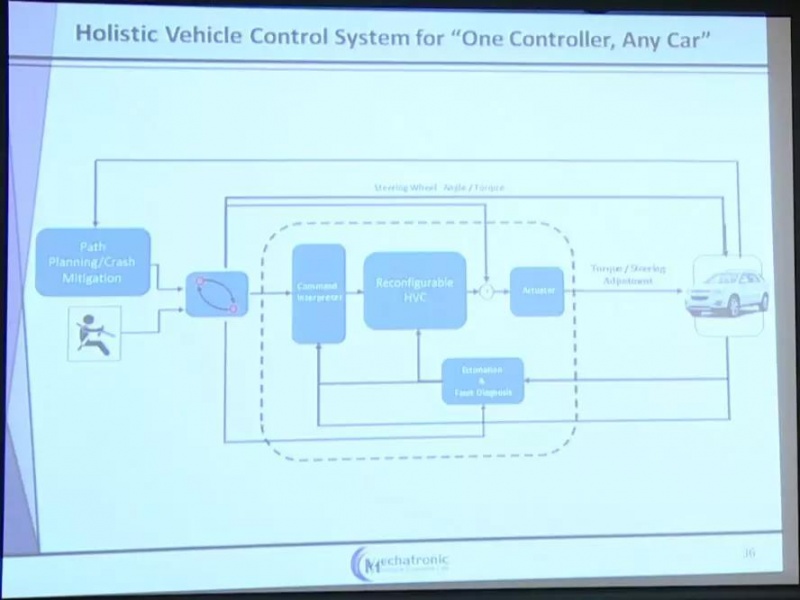
从上图最左边来看,对于一般的车辆控制过程,无论车辆由系统自主控制还是由驾驶员控制来进行路径规划或驾驶操作,或是两者通过转换机制交替进行控制,控制都需经过命令解释器(Command Interpreter)。系统能够通过命令解释器理解驾驶操作的目的,例如踩下油门或踩下刹车的操作目标。同时,车辆需要一个可重构系统(Reconfigurable HVC)。其能够在某个执行器发生故障时,通过对所需工作任务进行再分配以确保对车辆的正常控制。随后,系统将通过估计和故障诊断(Estimation & Fault Diagnosis)以及执行器(Actuator)。最后,控制命令到达车辆各元器件,实现车辆控制操作的具体实施。
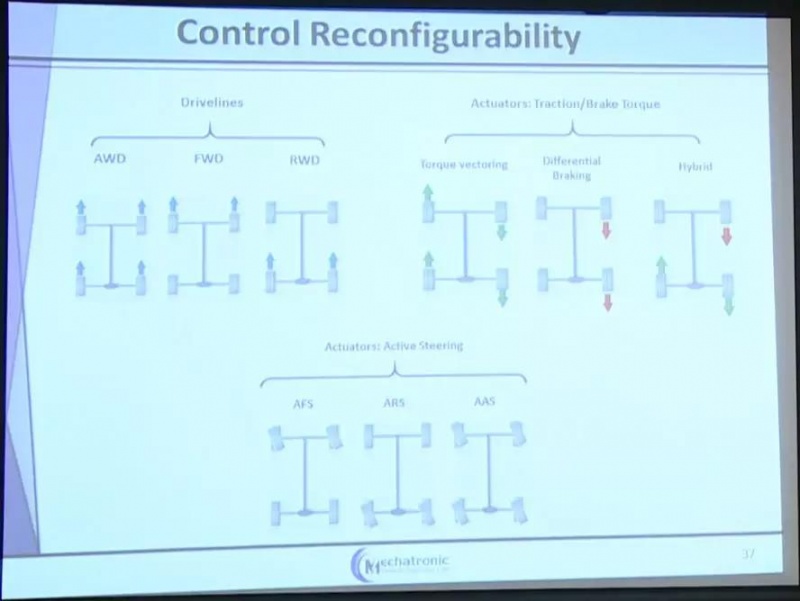
控制的可重构性(control reconfigurability)是针对现有的甚至未来的任何车辆而言的。首先根据动力传动系统(Driveline),车辆可分为全轮驱动(All Wheel Drive , AWD)、前轮驱动(Front-Wheel Drive, FWD)和后轮驱动(Rear Wheel Drive, RWD)。根据驱动系统,可分为扭矩矢量控制(Torque Vectoring)、差动制动(Differential Braking)和两者的结合体(Hybrid),也可分为主动前轮转向(Active Front Steering, AFS)、主动后轮转向(Active Rear Steering, ARS)和主动全轮转向(All Active Steering, AAS)。除驱动系统外,还可以添加悬架系统等其他系统,控制器则需要能够控制所有这些系统。下面将展示我们已研发的这类控制器的测试结果,在测试中一个控制器将被应用于不同的驱动系统或车辆中。
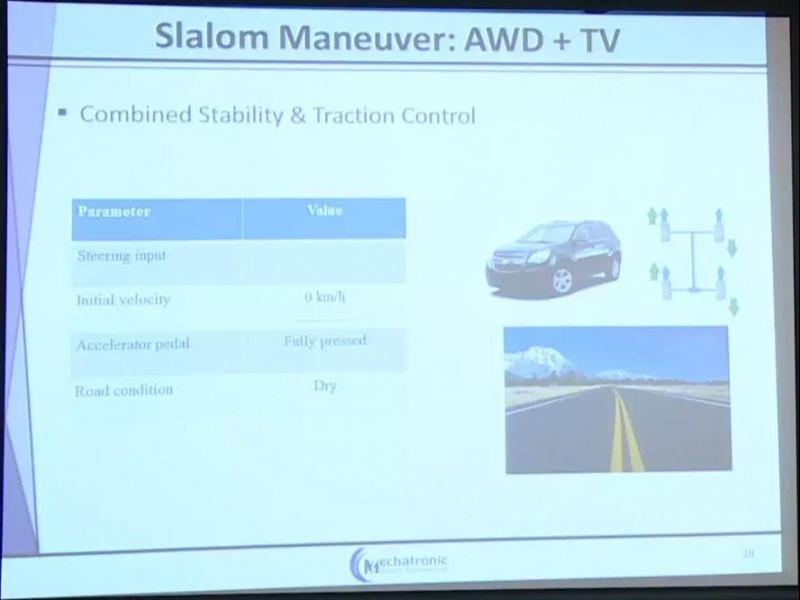
上图所示是综合稳定性和牵引力控制系统(combined stability & traction control)的回转滑测试(Slalom Maneuver),车辆在干燥的路面上以0速度起始后全力加速。在这个测试中,车辆使用全轮驱动(AWD)和扭矩矢量控制(Torque Vectoring, TV)。
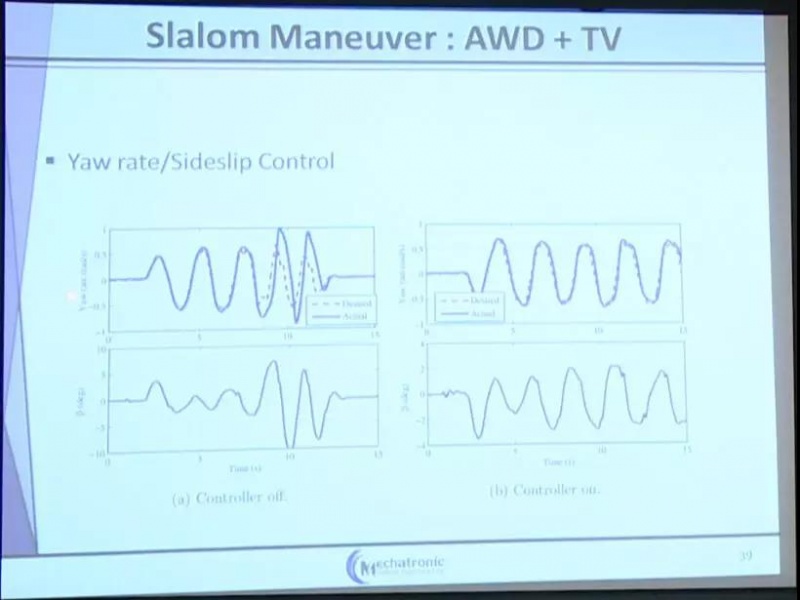
可以看到,第一行和第二行的图分别是角速度(yaw rate)和侧滑角(sideslip angle)的测试结果。左边的两幅图是车辆在没有安装控制器(Controller off)时进行测试的结果,图中的期望值(Desired)和实际值(Actual)分别为测试目标数值和实际检测数值,测试中车辆角速度的变化应随速度的变化而越来越大。但因为此时车辆中并没有任何控制器,所以图中角速度的实际值并不能完全按照期望值进行变化,两者结果间存在较大误差。同时,可以看到侧滑角β的结果变化也很大。当侧滑角超过4°时,车辆的滑动角度将会非常大,所以这意味着车辆的行驶状态并不稳定。
而在车辆中安装控制器(Controller on)后,观察左侧两图可以发现,车辆角速度的实际测量值能准确地按照目标期望值变化。这是一个真实的测试案例而不是仿真模拟实验。而再观察侧滑角结果,其变化范围在大多数情况下都能稳定在4°以下,这说明车辆处于完全平稳的行驶状态中。
随后,我们将相同的控制器应用于具有完全不同的配置和控制系统的车辆中,这辆车使用后轮驱动(Rear Wheel Drive, RWD)和差动制动(Differential Braking, DB)。
进行相同的测试,左侧两图是没有安装控制器时的测试结果。可以看到,角速度的实际值变化无法完全符合期望值变化,同时侧滑角β的最小值低于-20°说明车辆的侧滑偏差非常大。而安装控制器以后,角速度的实际值能与期望值相符合,且β值的变化范围完全在1.5°以下,也就是说车辆处于良好的控制下。
在另一种转弯加速(Acceleration in Turn)测试情景下,我们将完全相同的控制器安装在一辆包含两个驱动系统的车中。车辆用后轮驱动(Rear Wheel Drive, RWD)、主动前轮转向(Active Front Steering, AFS)和差动制动(Differential Braking, DB)。
上图是在没有控制器情况下的测试结果,图中的红色虚线为期望的测试结果,蓝色实线则描述车辆的实际行驶状况。可以看到,左上图中角速度的实际测试结果极值非常大,并且左下图中侧滑角β值的最小值和最大值分别达到-50°和80°,说明车辆在这个测试情况下完全打滑失控。同时,车轮速度(wheel speed)的实际结果也存在较大偏差。
这幅图展示的就是车辆的实际行驶情况。方框外是干燥的路面,方框内则是湿滑的路面。车辆试图按照蓝色的轨迹行驶,红色轨迹则代表车辆的实际行驶路线。观察两条轨迹间的偏差可以发现,车辆从湿滑路面的中部开始打滑失控,而当行驶到湿滑路面的末端时,其实际行驶方向与目标方向间的侧滑角偏差达到了80°。
上图是安装控制器后的测试结果。这是一个非常困难的测试,车辆需要在湿滑的路面上行驶的同时进行全力加速转弯。但可以看到,实际结果能够较准确地按照期望进行变化。
这时车辆的实际行驶情况是,红色与蓝色轨迹完全重合。所以车辆在配有控制器时,实际行驶轨迹能够完全符合目标期望。
主要目标——车辆稳定控制的通用路径规划
Main Goals: Universal Path Planning with VehicleStability Control
对于通用路径规划这一目标,我们利用势场(potentialfield)来进行相关研究。势场能够用于任何物体的描述,而物体的形状取决于自身的重要性。若物体具有很强的重要性,则将形成非常高的山脉,反之则将形成小丘陵。所以通过这种方式,可以生成不同的行驶状况情景,或将行驶路况环境转化为丘陵或山谷。
举例来说,在右上图中有五辆车行驶在车道上。通常为了保证车辆行驶的安全性,道路中线位置的地面会略微凸起,而道路边界部分的地面则具有明显较高的地势,如左上图所示。而行驶在道路上的每辆车,例如右上图中并排的两辆车,在势场中则显示为左下图中与山岳类似的形状。将左侧两幅道路状况图叠加,就会生成右下图中的图形。如果俯视观察这些图形,那么结果将会非常有趣。
最左侧的图像代表道路(Road),图像利用颜色的过渡变化表示地势高低过渡变化,图中蓝色和红色区域分别表示低地势和高地势,也就是刚才所展示的路面地势状况。中间图像中的两个红色圆形图案表示车辆(Vehicle),蓝色背景表示道路。若将两幅图像叠加,那么所得结果将会与最右侧图像类似。
现在想象一下,若使水从上述图形的一端流入,则其将会流经较低的平面。也就是说,基于势场的方法寻找适合车辆的行驶路径就等同于在势场中寻找海拔最低的路面。通过最低海拔即可找到最佳路径,这就是我们所采用的整个研究思路。
上图是我们研究的一个驾驶情况示例,图中的红色方框代表车辆,黑色方框代表以恒定速度移动的障碍物(moving obstacle with constant velocity)。现在车辆想要维持现有车速向右行驶,故需进行变道操作以越过障碍物。显然,利用势场的方法,车辆根据最低海拔找到了适合的行驶路线,由上图移动到下图所示的位置。
下面是另一个示例,用于研究车辆在弯曲道路上变换行驶车道的情况(lane change on a curved road),图中三种颜色的图标分别代表三台移动车辆。可以看到,蓝色图标所代表的车辆在向右行驶的过程中找到了合适的行驶路线并进行变车道操作。
另外在这个示例中,这种方法使我们不仅能够对移动方向进行控制,同时还能够对行驶速度进行调整。在下方两图中,蓝色曲线分别表示可进行调整的纵向力(longitudinal force)和转向角(steering angle),红色曲线分别表示车辆的速度(speed)和侧向加速度(lateral acceleration)。左下图中的蓝色曲线描绘的是车辆的刹车或加速控制情况,可以看到车辆在变换车道时其车速从近100Km/h骤降到约83Km/h,而在完成车道变换后车速又逐渐回升到100Km/h。
主要目标——碰撞减缓与控制
Main Goals: Crash Mitigation and Control
最后对于碰撞减缓(crash mitigation),我认为人们需要始终记住,自动驾驶并不意味着能够避免碰撞事故的发生。那么问题是,如何进行碰撞减缓才能将损害最小化?
对车祸事故严重程度(the severity of an accident)来说,其主要影响因素有车速(Speed of the crash)。其次还有障碍物的种类(Nature of the obstacle),比如障碍物属于大质量还是小质量固体?同时,车辆安全设备(Vehicle safety devices)和碰撞的方向(Direction of collision)也很重要,例如以45°角撞击所造成的碰撞事故将会使被撞车辆的损坏程度最大化。最后是车辆质量比(Mass ratio of the vehicles),例如轿车与卡车相撞所造成的损坏显然要比其与同类型轿车相撞严重得多。
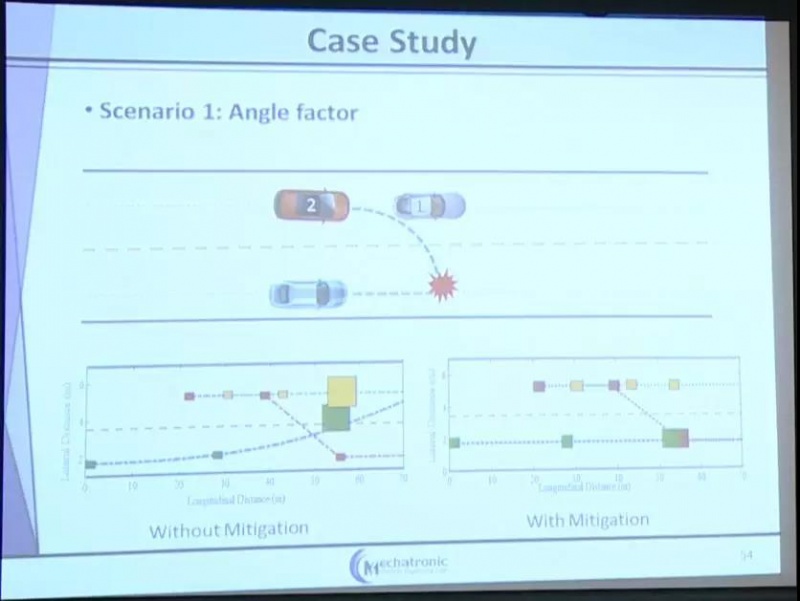
我们可以做的是,利用这些相关因素以确保在将要发生碰撞的情况下,将事故损失最小化。上图就是一些相关研究示例。在这个场景中有三辆车,其中红车在行驶过程中突然改变行驶车道,而右侧的蓝车在其变道的同时没有足够的时间停车,所以显然蓝车将会发生碰撞事故。若其不采用任何碰撞减缓或路径规划措施,则结果将如左下图所示,蓝车为躲避红车而向左前方行驶,最后以45°的夹角撞击紫车或红车的侧面。
但按照右下图所示,碰撞损失最小的情况是蓝车从正后方撞击红车。因为蓝、红两车的相对速度最小,且追尾事故对相撞两车来说所造成的损失最小。故在红车变道时,蓝车应在全力刹车的同时迅速实施这项减缓措施,而不是改变行驶方向。
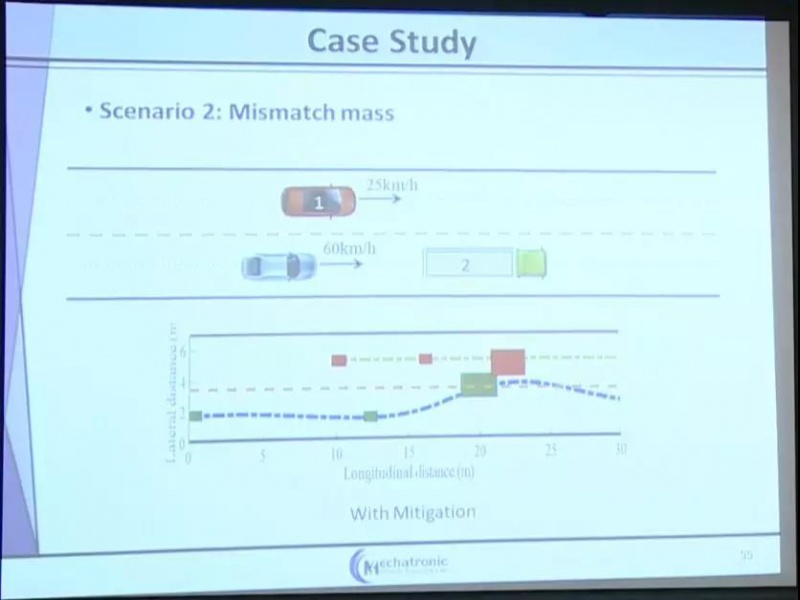
而在相同的情景中,如果前车为卡车而非轿车,那么减缓措施就需要进行相应的调整。因为从侧面撞击红车所造成的损失比从后方撞击卡车要小,所以蓝车的碰撞减缓方案应为改变行驶方向撞击红车。
总结
Summary
以上就是对我们在研发下一代车辆方面研究工作的概括性总结。总的来说,车辆由于交通方式、无人驾驶和共享经济等新变化以及不同传感器的增加而变得更越来越复杂。就目前来说,所有的组件或系统都为独立式设计,这意味着将其结合的运行效果并不理想,所以应尽量避免这种情况的发生。此外,我们需思考该如何利用当前的新型传感器、车辆通信以及物联网,这些都是使系统更加复杂的新挑战。但在作为挑战的同时,其也为车辆的安全和性能优化的进一步研究创造了新的机会。最后,我认为不能局限于车辆控制系统方面的原有研究思路,应构思统一且整体的新方法去解决问题。另外,还应该坚持构建基于模型的系统而非临时的专用系统。
以上就是今天讲座的全部内容,谢谢大家。
Q&A

Q1:我想请问教授您如何看待强化学习(Reinforcement Learning)?您会选择怎样将其应用于无人驾驶的研究中?
A1:在大多数情况下,学习方法(例如机器学习、深度学习和强化学习)和其他相关技术都应用于感知层面。因为人类利用自身的感官来感知车辆行驶环境的过程无法使用方程式描述,所以车辆一般通过学习过程进行感知。
而如果车辆的行驶环境信息已知,我更倾向于推导相关原理方程式或构建环境模型。为什么要利用学习方法来研究已知原理的简单事物呢?人们通常认为通过学习方法可以完成任何研究工作,但我不认为这个观点是正确的。当模型无法建立时应利用学习方法,但模型已知时为什么要使用它呢?例如,我曾见过有人用学习方法对钟摆的运动进行模拟仿真,为什么要用它来模拟符合微分方程的钟摆运动呢?
所以,应在无法对所研究的复杂事物进行具体公式推导时使用学习方法。不了解大脑与眼睛或耳朵等感官进行信息传递的具体方法过程,才是使用学习方法的原因。
Q2:我认为碰撞减缓是无人驾驶领域中非常有挑战性的研究问题。未来车辆的设计布局是否可能与现有车辆不同,例如没有驾驶座?
A2:这是我们需要进一步研究新事物。首先,这涉及许多伦理道德标准。刚才我只展示了从车辆碰撞损失角度来看明确的示例,而并没有考虑人类影响因素。但如果现在有两辆车,一辆车载有两名乘客,另一辆车只载有一名乘客。那么在无法避免碰撞的情况下,应该撞击哪辆车呢?又或者,一辆车载有年轻乘客,另一辆车载有老年乘客,那么又该撞击哪辆车呢?
显然,我并不能做出合理的判断。至少从现在看来,这些是非常难以回答的问题。具体情景的假设条件可能不同,但无论如何都需确保最低安全性,例如乘客需要系好安全带、驾驶员需要按一定思路将碰撞损失最小化。我不认为无人驾驶可以解决所有的交通问题,这是过于理想的想法。这在实际生活中是不可能发生的,我们需要现实一点。
无人驾驶是一种必然的发展趋势。想要将新概念融入现有模型或方法中的想法是好的,只需要明确的伦理道德标准就能确定具体该如何实施。但就目前来说,这些仍是我们不知道如何但未来一定能够解决的问题。
Q3:请问您如何看待最近Uber无人车的交通事故?您认为事故的发生与车辆感知系统有关吗?
A3:目前为止,还没有公布任何具体官方信息,我们所知道的是事故车辆在深夜行驶中撞击了一辆自行车。车辆制造商声称事故问题不在于激光雷达,其检测到了自行车,但车辆并没有做出相应的反应。有人认为感知系统的学习训练不够充分,以致其无法在黑暗的环境中获取足够的信息并识别出自行车。根据刚才所提到的学习方法,感知模块需对相关信息进行学习。如果没有构建对应情景进行学习,例如在不同的光照下识别自行车或其他事物,那么系统可能难以感知和理解周围的环境。
我认为导致事故发生的因素可能有很多,车辆感知系统的故障可能只是其中之一。系统的感知模块可能未在样本数据充足的条件下进行训练,以致其无法准确识别自行车,但车辆制造商声称激光雷达的确检测到了自行车。
Q4:请问您是否认为无人驾驶将完全取代人类驾驶?
A4:我不这么认为。因为很多人享受驾驶的过程,我有时候也很喜欢开车,所以我不认为无人驾驶的目标是使人类摆脱驾驶操作。事实上,无人驾驶应形成一个规范的过程。在受限的环境中或某些特定情况下,人们虽然坐在车中但更倾向于车辆自主驾驶而非由人类控制操作。
在未来100年内,经济发展的趋势并不是使每个人或每个家庭都拥有一辆车,至少在未来50年内可能不是。未来发展更趋向于共享经济,汽车将会类似于ofo这类共享单车。这是典型的共享经济,人们随时都能在需要时轻松获取自行车,自行车在使用完毕后可由其他人使用,这使得可能没有人会再购买自行车。我认为这可能也是汽车驾驶的发展趋势。
或许在未来,某些车辆在懂得如何自主驾驶的同时也配备方向盘等设施,使任何人都能够享受驾驶的过程。
【作者简介】
陈虹宇
中国科学院自动化研究所复杂系统管理与控制国家重点实验室硕士研究生。
主要研究方向为社会交通,机器学习和深度学习。
嘉宾简介:
Amir Khajepour教授担任车辆机电一体化领域的Tier-1 Canada Research Chair 以及在加拿大自然科学与工程研究理事会(NSERC)、通用汽车(General Motors)担任资深的整体车辆控制领域的研究主席。Amir Khajepour教授在几个关键的多学科领域开展了广泛的研究计划。他发表了超过450篇论文和会议出版物,8本专业书籍,并发表了许多主题演讲。他是加拿大工程研究院(Engineering Institute of Canada)院士、美国机械工程师学会(American Society of Mechanical Engineering)会士和加拿大机械工程师学会(Canadian Society of Mechanical Engineering)会士,并担任Journal of Mechatronics、International Journal of Vehicle Autonomous Systems、International Journal of Powertrain副主编。
报告内容:
主持人王飞跃教授:
Amir Khajepour 是加拿大滑铁卢大学的教授。滑铁卢大学与国内高校不同,其要求学生在校学习一年后外出实习一年,这是全北美唯一一所实行这种学制的大学。虽然学校创建时间相对较晚,于1957年成立,但这种独特的学制要求使得学校所培养的学生倍受公司青睐。同时,学校很多毕业生现在都在硅谷工作或创业,比如自动驾驶卡车公司。
他是加拿大工程研究院(Engineering Institute of Canada)院士、美国机械工程师学会(American Society of Mechanical Engineering)会士和加拿大机械工程师学会(Canadian Society of Mechanical Engineering)会士,并担任Journal of Mechatronics(机电一体化)、International Journal of Vehicle Autonomous Systems(国际汽车自主系统)、International Journal of Powertrain(动力传动系统国际期刊)的副主编。他主要进行汽车动力学、车辆控制系统等方面的研究工作,并且在相关领域中发表了非常多的文章。
今天他为我们带来的报告题目是 Next Generation of Vehicle Control Systems,大家掌声欢迎Amir Khajepour 教授。
主讲嘉宾:
非常感谢王教授的介绍,很荣幸能够来到这里针对我在下一代车辆控制系统方面的研究工作进行报告。
今天,我想首先介绍一下我在滑铁卢大学所负责的实验室,接着针对车辆控制系统(Vehicle Control Systems)方面研究的主要挑战以及下一代车辆控制系统的研究原因进行阐述,最后具体展示为应对和解决这些挑战而进行的相关工作。
我所管理的机电车辆系统实验室(Mechatronic Vehicle Systems Laboratory)拥有包括博士、技术员、博士后等在内的研究人员约40-50人,他们分别负责不同的研究项目。所进行的工作内容不仅限于理论研究,而是涵盖从理论研究到模型设计再到量化生产以及测试设施和实验测试等全部研究流程范畴。此外,实验室还拥有如上图所示的测试车辆。实验室面向所有类型的交通运输工具进行研究,不论是传统车辆还是全电式车辆,或是用于电力管理与控制研究的大型运输卡车,以及用于新技术开发的新型城市车辆。
所以我们的研究工作简单来说就是,提出并探究一些新的想法或概念,将其转化为实体形式并应用于实际车辆进行全面测试。上图就是目前实验室所拥有的一些测试车辆(test vehicles)。
目前,实验室致力于研发能够完全由车辆进行自主驾驶及控制的高性能车辆(new high performance vehicle),即性能达到饱和水平的车辆。例如,我们将一辆SUV(Sport Utility Vehicle,运动型多用途汽车)改造为600马力(1公制马力=75千克力·米/秒=735瓦特、1英制马力=550英尺·磅/秒=745.7瓦特)的全电动轿车,其能够以50英里/小时-60英里/小时的速度进行自主行驶。同时,这辆车可进行与小型轿车同等程度的测试。
从上图中可以看到,所有测试车辆的车载装置(instrumentation)都配备齐全,使车辆能够进行各种类型的所需测试。
现在我们看到的是测试跑道设施(test track facilities)。左上角的测试跑道在学校附近,用于车辆大部分的本地测试。右上角是位于美国米尔福德市的跑道设施,其用于通用模型车的相关测试,图中展示的是路面对比测试路段。下图展示的是车辆在英国金罗斯市进行冬季测试。
背景
Background
接下来我将进入报告主体部分——车辆控制。
从整体来看,一辆车(vehicle)就相当于一个控制系统,车辆的行驶就像控制器的运行。驾驶员(driver)在驾驶车辆时会对周围环境进行观察,例如路面状况、视野内的可见物体等,并给车辆发送相应的信号,即施加给方向盘、刹车和油门的操作信号。随后,驾驶员通过眼睛和耳朵等感知器官接收车辆产生的状态反馈信号,进行相应的控制调整。
环境(environment)能够对驾驶员和车辆同时产生影响。如果道路状况较差,那么车辆可能不会对控制操作做出精准的反应,或者驾驶员的驾驶行为可能会发生变化。所以环境是影响车辆控制系统的噪声和干扰的一部分。
而在车辆中加入控制器(controller)后,就能够实现对车辆故障或难以控制状况的调整。控制器通过环境输入获知行驶环境路况,同时通过驾驶员的输入了解驾驶操作状态。控制器通常还需根据车辆自身的行驶状况,例如转向角、制动转矩或牵引转矩等信息,向车辆反馈相应的信号,从而调整驾驶员的驾驶行为。
事实上,主动控制系统引入车辆的历史并不长。17世纪之前,所有车辆的行驶都仅依赖于驾驶员的操作控制,人类是车内唯一的控制器。在那之后,车辆控制系统中开始加入一些被动的安全装置,比如安全带(seat belts)。
17世纪以后,市面上出现了包括主动安全系统在内的新型设备装置。首先是在1978年出现的防抱死刹车系统(Anti-lock Braking System, ABS),其作用是当刹车踏板被用力踩下或车辆在结冰的地面上制动时,确保车轮不会被完全抱死锁住。随后在1980年,出现了能够对车身变化进行更好地控制的主动或半主动悬架系统(Active/semi-active suspension system)。1987年的牵引力控制系统(traction control system, TCS)用于防止车辆在起动或加速时出现的车轮打滑等现象。其后,1995年面世的车身电子稳定程序(Electronic Stability Program, ESP)可以通过在车辆一侧采取制动措施使车身产生转动以控制车辆的移动。在那之后,2004年的主动前轮转向(Active Front Steering, AFS)能够调整转向角度来防止某些事故的发生。
目前市面上任何类型的车辆,都至少拥有最低标准数量的车辆动力学控制系统(Vehicle Dynamics Control System, VDC)。同时,无论是用于安全系统还是其他系统中,不同用途的微处理器数量都在迅速增多,这使得车辆变成了“车轮上的计算机”。而能够在这些“计算机”上进行驾驶操作,主要归功于大量存在于其中的处理元件和应用程序。
挑战
Challenges
现在的问题是,这些加入到车辆中的主动控制系统都是相对独立的组件。车辆所需的不同系统组件可能需要分别从不同的公司购买,同时这些组件以及控制器之间还需要进行匹配,以确保它们能够顺利地协同工作。在这个过程中,汽车公司为保证不同控制系统能够顺利协调运行,构建了许多查找表和事件库,导致耗费了大量的时间和资金。
而车辆控制系统的复杂度在未来将会进一步增加,其主要与驾驶员辅助系统(Driver Assistance System, DAS)和自主驾驶(Autonomous Driving)有关,例如增加新型传感器、路径规划和跟踪功能以及越来越多的程序代码和控制算法。同时,除了车辆能够自主获取的信息外,所用信息还来自于物联网(Internet of Things, IoT),其使得所有事物间都可以进行信息交互。与此同时,所获得的大量信息需要进行有效利用,这就引入了信息融合(information fusion)这一复杂度。此外,连通的车辆(connected vehicle)间可以进行沟通交互,这意味着一辆车能够获得其附近所有车辆的信息。车辆与其他车辆、基础设施甚至所有的事物的信息交互使得系统变得异常复杂,所以现在的问题是,该如何利用这些复杂信息?
这些挑战要求我们采用全新的思路对车辆控制进行研究。首先,需要一个能够解决系统现存和潜在复杂度问题的平台。平台能够将现有系统与无人驾驶、物联网等新技术进行无缝整合,但要避免系统间引发冲突或危险情况。同时,要确保消除由不同系统冲突指令所导致的风险。此外,需研发可应用于所有不同类型车辆的控制器,在降低系统整体成本的同时不增加可能发生冲突故障的组件。
整体车辆控制
Holistic Vehicle Control
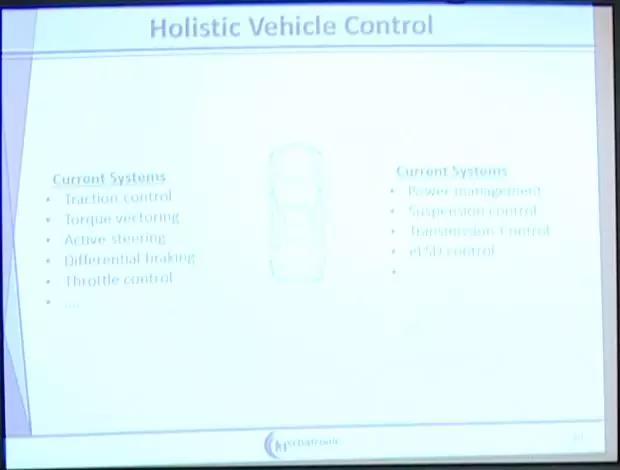
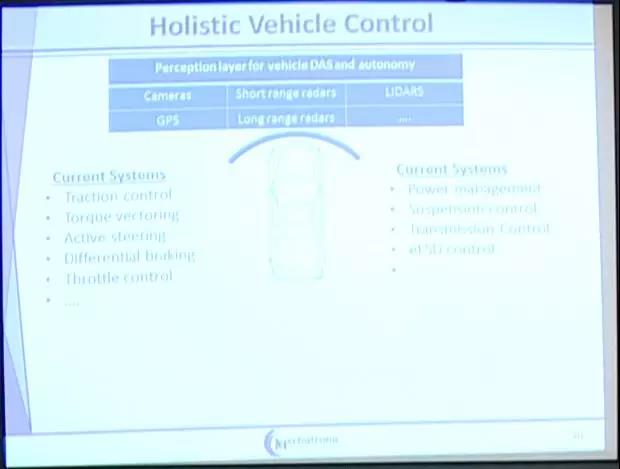
所以我们提出了整体车辆控制(Holistic Vehicle Control)方法。车辆应配备牵引力控制(traction control)、扭矩矢量控制(torque vectoring)、主动转向(active steering)、差动制动(differential braking)和节气门控制(throttle control)等常规车辆控制系统,以及电源管理(power management)、悬架控制(suspension control)、传动控制(transmission control)、电子限滑差速器控制(Electronic Limited Slip Differential control, ELSD)等系统。
除添加驾驶辅助系统(Driving Assistance Systems, DAS)和自主驾驶的感知层(perception layer)外,为实现驾驶辅助和无人驾驶,还需在现有基础上安装许多新传感器,包括摄像机(cameras)、GPS、雷达(radars)、激光雷达(lidars)等。
与此同时,我们利用物联网技术为车辆提供大量的新信息。也就是说,车辆与周围其他设备进行交互以获取交通流量、道路状况、天气情况等信息。在了解各系统的工作原理之后,我们就可以对车辆进行良好的控制。
主要目标
Main Goals
那么,为构造安全可靠且可控性强的车辆,需要进行哪些工作呢?显然,首先是车辆状态估计,因为车中所有的状态和参数信息不可能都通过传感器进行获取。例如,用于控制车轮滑动状况的实际车速,事实上其测量并不容易。其次,传感器和执行器的容错检测和处理也非常重要。人类可以通过多种途径感知车辆的噪音、震动或其他状态,但无人车该如何在传感器发生故障时获知车辆的状态信息呢?另外,我们应该确保所有的行驶情况都基于模型库,而不是查找表或者事件库。只有通过这种方式,车辆行驶状况才能被更合理地解释、拓展和优化。同时,车辆也非常需要一个可以应对不同情况的通用路径规划系统。最后,当发生车辆碰撞事故时,自主驾驶系统为减轻事故损失而采取的措施也是研究内容之一。以上这些就是我们在研究车辆控制系统时想要实现的主要目标。
接下来我将介绍一些我们已完成的研究,并展示一些相关的示例。
主要目标——一种具有容错性和可靠性的可靠状态估计系统
Main Goals: A Reliable State Estimation System with Fault Tolerance and Reliability
当谈到具有容错能力和可靠性的一般状态估计(generalstate estimation with fault tolerance and reliability)时,我们首先要确保所有具有动力系统(powertrain)和拖车结构(trailer)车辆的正常运行,所以需对车辆中的所有状态和参数进行可靠的估计。其次,估计系统的模块化(modularity)使得系统的添加变得更容易。同时,协同估计(cooperative estimation)也非常重要。我们希望通过车辆间的信息交互以及额外数据的融合进一步提高估计系统的性能。并且,估计系统需要进行故障诊断和可靠性衡量(fault diagnosis and reliability measures),这有助于确保系统性能足够良好。
这是一幅估计系统的结构总图(general diagram),假设现在有一辆车(左侧中部)和大量传入车辆的信息。所有来自图中左下角故障检测和重构部分(Sensor/Actuator Fault Detect & Reconstruction)以用于执行器和传感器运行情况诊断的信号以及来自物联网模块(Internet of Things)的额外信息,都将输入到右侧的一般状态估计模块(State Estimator)。系统都需要进行哪些信息估计呢?
首先,从图片的顶部车轮扭矩估计模块(Wheel Torque Estimator)开始,我们需要了解施加于每个车轮的扭矩,以确定车轮没有出现打滑或锁住的现象。接下来,力估计模块(Force Estimator)会对坡度和倾角进行估计。如果存在一定的坡度或倾角,则需通过图中底部的道路检测模块(Robust Road Grade/Bank Estimator)检测和估计行驶路况,并且右侧中部的速度估计模块(Velocity Estimator)将测量每个车轮的速度。最后,图片右上角的估计可靠性模块(Estimator Reliability)会衡量所有已完成估计的可靠性,并将所得结果信息返回控制系统,使其能够对控制器进行相应的操控。
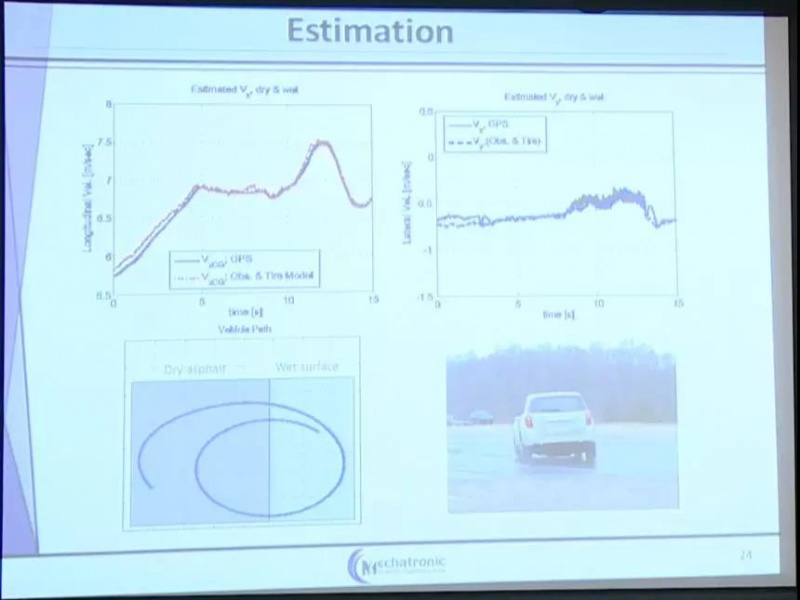
下面是部分测试结果。测试通过极端不理想的行驶路况来观察车辆的估计结果,同时车辆需尽量保持稳定车速。在测试过程中,车辆以环形路线在干燥的沥青路面(dry asphalt)和湿滑的沥青路面(wet asphalt)上交替行驶,与此同时分别对其在两种道路上行驶的纵向速度(longitudinal velocity, vx)和横向速度(lateral velocity,vy)变化进行估计。测试结果如上图,图中的两条曲线分别代表GPS数据和估计数据。可以看到,系统对车辆实际状况的估计结果准确度非常高。
主要目标——传感器和执行器的故障检测和处理
Main Goals: Sensor and Actuator Fault Detection and Handling
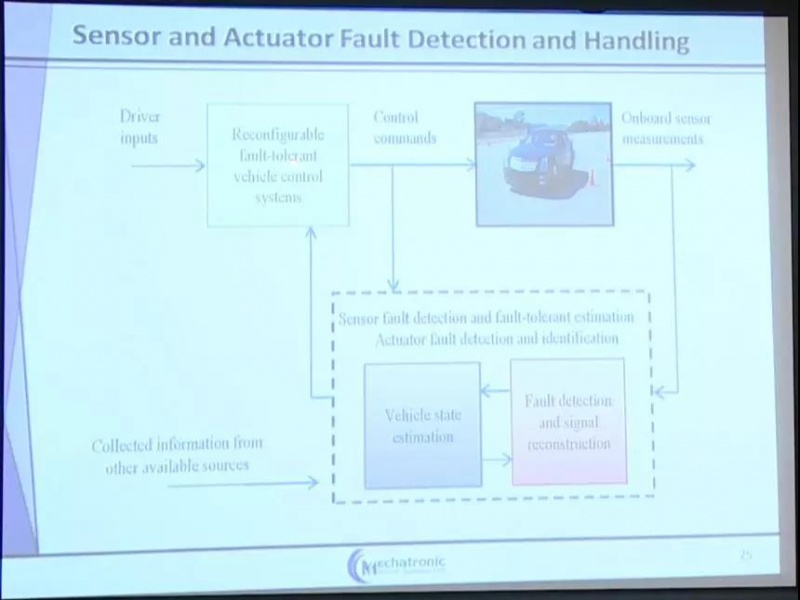
针对传感器的失灵或故障现象,我们构建了一个可重构车辆容错控制系统(reconfigurable fault-tolerant vehicle control system),并将其添加在图中左上角的驾驶员输入之后。系统在接收到传感器失灵或故障的信号后,必须确保能够检测到对应传感器,并通过其他传感器对其进行重构。
你可能会问,如何对传感器进行重构?实际上车辆中存在一些附加的传感器,其主要为惯性测量单元(Inertial Measurement Unit, IMU),其能够通过纵向速度(longitudinal acceleration)ax、横向加速度(lateral acceleration)ay和角速度(yaw rate)对某些传感器进行重构。
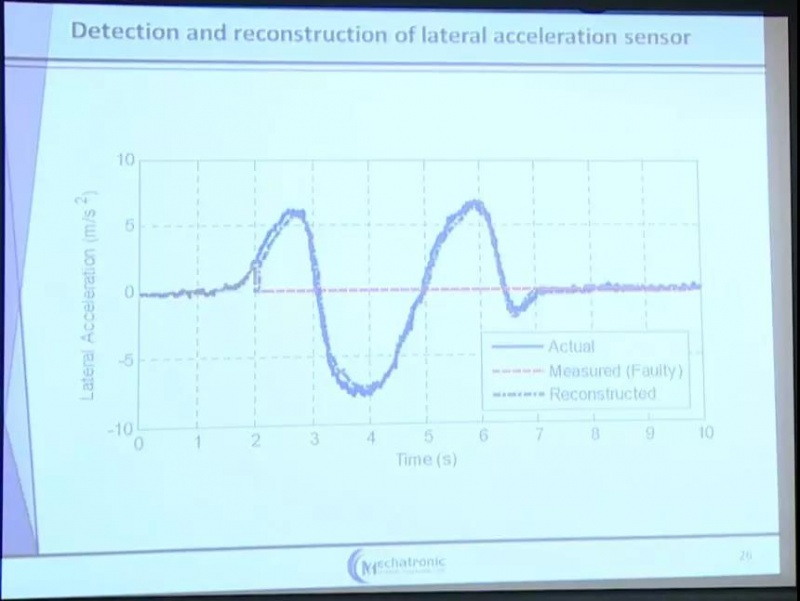
接下来我以横向加速度ay传感器的检测和重构为例进行具体说明。在图中,蓝黑红三色曲线分别表示横向加速度的实际数值、重构数值和测量数值。当传感器在2秒时发生故障导致检测信号丢失后,系统利用其他的传感器重构所得信号的准确度较高。所以,即使在失去传感器检测信号的情况下,系统依然可以获得良好的重构信号。
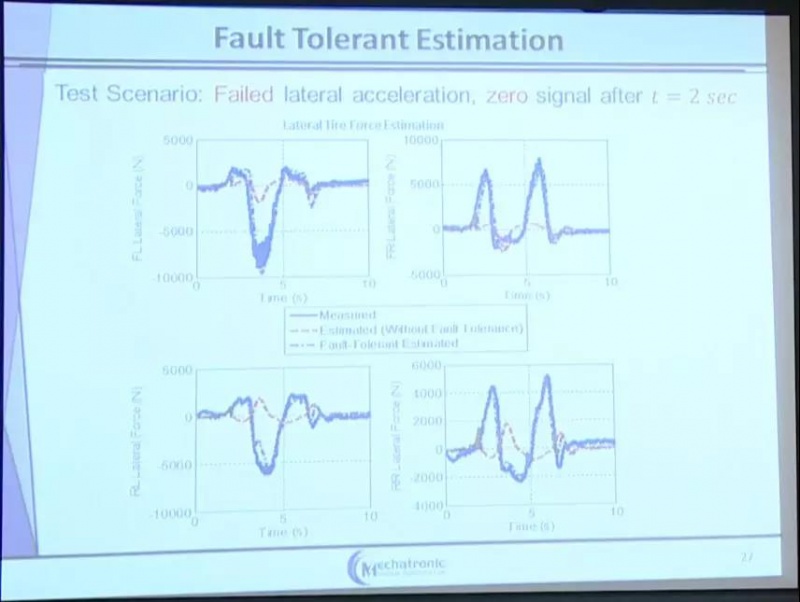
现在再来看刚才这个示例的容错估计研究(fault tolerant estimation)。上面四幅图分别是左前(Front Left, FL)、右前(Front Right, FR)、左后(Rear Left, RL)和右后(Rear Right,RR)四个车轮侧向力估计(Lateral Tire Force Estimation)的对照实验结果,图中的蓝黑红三色曲线分别表示轮胎侧向力的实际信号、重构信号和测量信号。显然可以看到,非容错系统只能给出具有较大误差的故障信号(fault signal),而重构信号则能够得到各车轮侧向力的准确数值。
另外,我们的研究工作还包括利用外界信息对估计结果进行完善。这些信息可能来自V2R(Vehicle to Road Infrastructure)、物联网或V2V(Vehicle to Vehicle),但是该如何使用这些信息进行估计的优化呢?在拥有系统内置估计的情况下,我们需要将数据融合以优化估计。
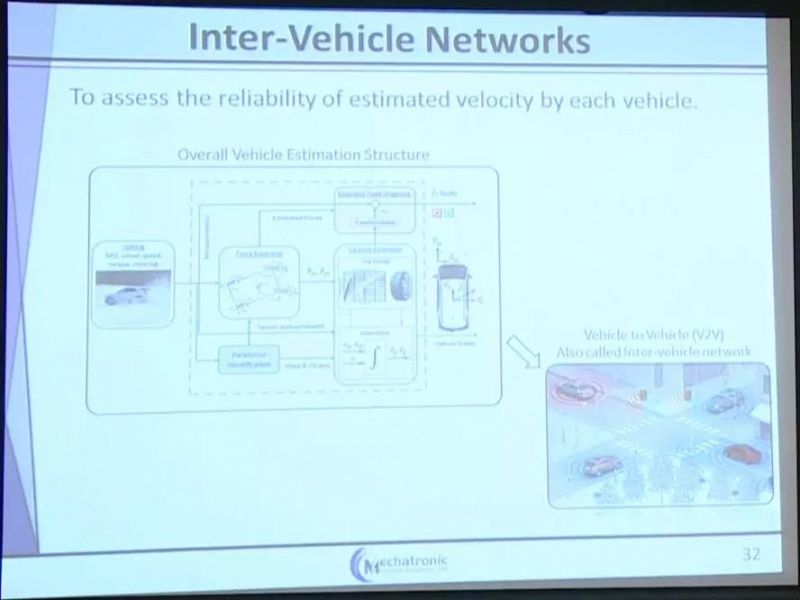
在研究网络通信的整体概念后,我们将其理论引入估计结果的提高研究中,并将车辆的通信网络分为车辆内网络(Intra-Vehicle Network)和车辆间网络(Inter-Vehicle Network)。
通过车辆内网络,车辆中不同位置的度量值可用于同一位置估计结果的完善。例如位于图片左下角的这辆车,其四个车轮都与车身相连。由于车辆整体的刚体运动,车轮所在四个角的速度映射到车辆中心位置都应得到相同的结果,这就是网络通信的相同理论。
利用这个理论,车辆每个角车轮的速度数据可以通过车辆内网络传到中心位置,同时根据舆论动力学(opinion dynamics)提高中心位置估计结果的可靠性。所以即使某个车轮提供的是错误数据,中心位置的状态仍可通过其他车轮的数值进行估计,并返回给车辆的每个角调整车轮状态。
上图是在冰面上的加速和制动测试所得部分结果,四张图分别代表车辆四个车轮的数据,研究对象是车轮中心的速度。蓝色和红色的曲线分别描述传感器实际测得车轮外围(Wheel Peripheral)和车轮中心(Wheel Peripheral)的速度,黑色曲线是通过车辆内网络计算所得数值(Measure)。
这是一项很难进行的测试,特别是当车轮旋转或锁住时。车轮外围速度在第一行两幅图中与车轮中心速度的偏差说明车轮出现打滑失控现象,在下方两图中则出现速度突增现象,而利用车辆内网络则能够实现对车轮中心速度的无偏差准确估计。
车辆间网络(Inter-Vehicle Network)的通信情况也是相似的。每一辆车的通信都依照现行最新标准。
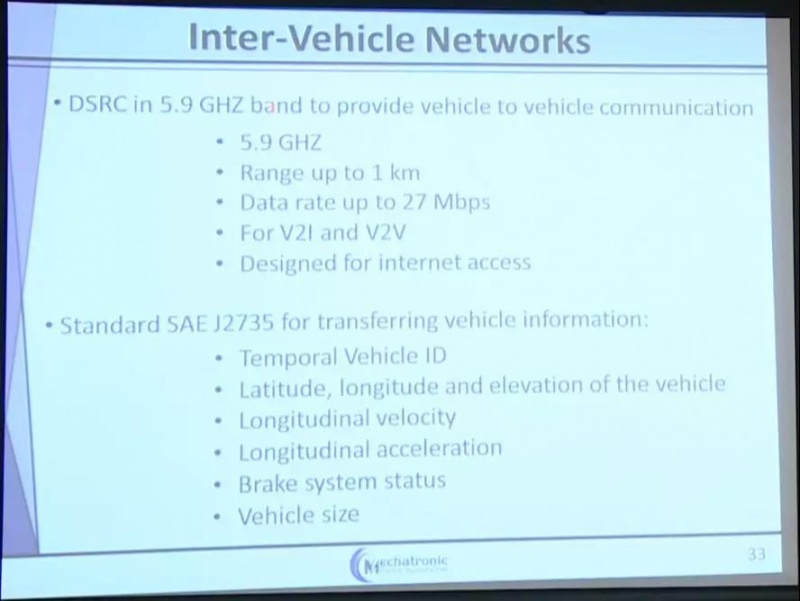
利用通信线路的专用短程通信技术(Dedicated Short Range Communications, DSRC),所有车辆都能够实现信息传送。其中,根据SAE J2735标准,车辆能够向外界发送包含临时车辆ID(temporal vehicle ID)、车辆的纬度、经度和海拔(latitude,longitude and elevation of the vehicle)、纵向速度(longitudinalvelocity)、纵向加速度(lateral acceleration)、制动系统状态(brake system status)以及车辆大小尺寸(vehicle size)等在内的信息。利用这些信息可进行有针对性的车辆碰撞减缓处理,所以车辆具体信息的获取对状态估计和无人驾驶来说都非常重要。
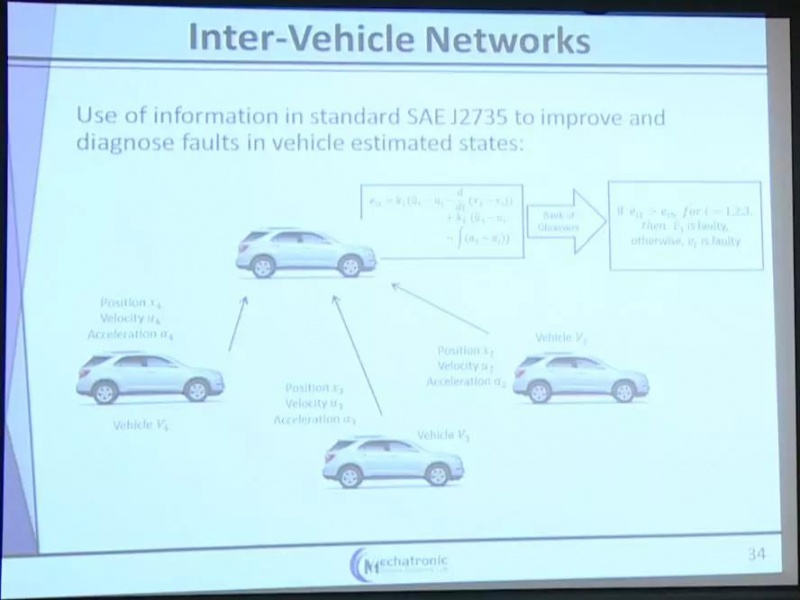
可以想象车辆现在处于一个网络中,网络中的每一个节点都在向其传送信息。根据从每个节点获得的信息能够对现有信息进行完善,随后再将更新后的信息传回其他车辆。甚至,可以利用这些信息根据舆论动力学向指定车辆发送信息,以完善车辆的状态估计。这就是我们所采用的信息融合方法。
上图就是车辆间网络的整个信息交互过程。图中最上方的车辆接收其他车辆所发送的速度及其他信息,进行自身状态估计的完善,同时,其也向其他车辆发送信息,使车辆了解各自的状态估计情况。以上就是状态估计方面的研究工作。
主要目标——基于模型的控制系统以实现“一个控制器应对所有车辆”
Main Goals: Model-based Control Systems to Achieve“One Controller, Any Car”
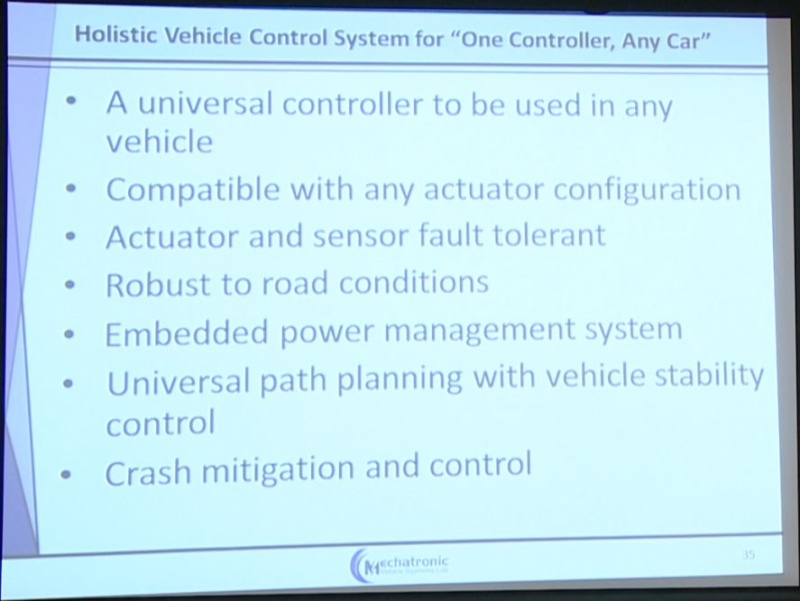
此外,我们希望开发一种可应用于所有车辆的通用整体车辆控制系统(Holistic Vehicle Control System)。其能够兼容任何类型的执行器,实现执行器和传感器的容错,并在任何路况下都始终保持鲁棒性。同时根据未来发展趋势,其还应具有嵌入式电源管理系统(embedded power management system),并能够实现通用路径规划(universal path planning)和无人驾驶领域研究中日益重要的碰撞缓解(crash mitigation)。
从上图最左边来看,对于一般的车辆控制过程,无论车辆由系统自主控制还是由驾驶员控制来进行路径规划或驾驶操作,或是两者通过转换机制交替进行控制,控制都需经过命令解释器(Command Interpreter)。系统能够通过命令解释器理解驾驶操作的目的,例如踩下油门或踩下刹车的操作目标。同时,车辆需要一个可重构系统(Reconfigurable HVC)。其能够在某个执行器发生故障时,通过对所需工作任务进行再分配以确保对车辆的正常控制。随后,系统将通过估计和故障诊断(Estimation & Fault Diagnosis)以及执行器(Actuator)。最后,控制命令到达车辆各元器件,实现车辆控制操作的具体实施。
控制的可重构性(control reconfigurability)是针对现有的甚至未来的任何车辆而言的。首先根据动力传动系统(Driveline),车辆可分为全轮驱动(All Wheel Drive , AWD)、前轮驱动(Front-Wheel Drive, FWD)和后轮驱动(Rear Wheel Drive, RWD)。根据驱动系统,可分为扭矩矢量控制(Torque Vectoring)、差动制动(Differential Braking)和两者的结合体(Hybrid),也可分为主动前轮转向(Active Front Steering, AFS)、主动后轮转向(Active Rear Steering, ARS)和主动全轮转向(All Active Steering, AAS)。除驱动系统外,还可以添加悬架系统等其他系统,控制器则需要能够控制所有这些系统。下面将展示我们已研发的这类控制器的测试结果,在测试中一个控制器将被应用于不同的驱动系统或车辆中。
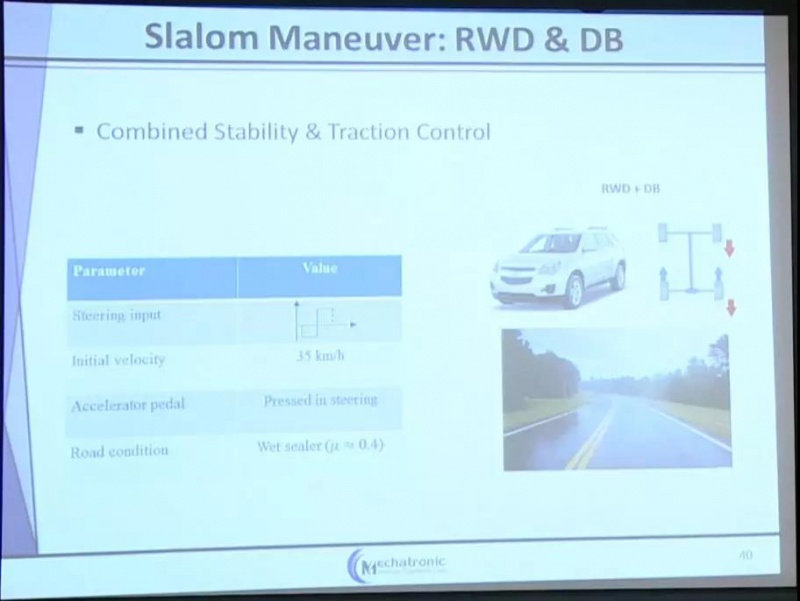
上图所示是综合稳定性和牵引力控制系统(combined stability & traction control)的回转滑测试(Slalom Maneuver),车辆在干燥的路面上以0速度起始后全力加速。在这个测试中,车辆使用全轮驱动(AWD)和扭矩矢量控制(Torque Vectoring, TV)。
可以看到,第一行和第二行的图分别是角速度(yaw rate)和侧滑角(sideslip angle)的测试结果。左边的两幅图是车辆在没有安装控制器(Controller off)时进行测试的结果,图中的期望值(Desired)和实际值(Actual)分别为测试目标数值和实际检测数值,测试中车辆角速度的变化应随速度的变化而越来越大。但因为此时车辆中并没有任何控制器,所以图中角速度的实际值并不能完全按照期望值进行变化,两者结果间存在较大误差。同时,可以看到侧滑角β的结果变化也很大。当侧滑角超过4°时,车辆的滑动角度将会非常大,所以这意味着车辆的行驶状态并不稳定。
而在车辆中安装控制器(Controller on)后,观察左侧两图可以发现,车辆角速度的实际测量值能准确地按照目标期望值变化。这是一个真实的测试案例而不是仿真模拟实验。而再观察侧滑角结果,其变化范围在大多数情况下都能稳定在4°以下,这说明车辆处于完全平稳的行驶状态中。
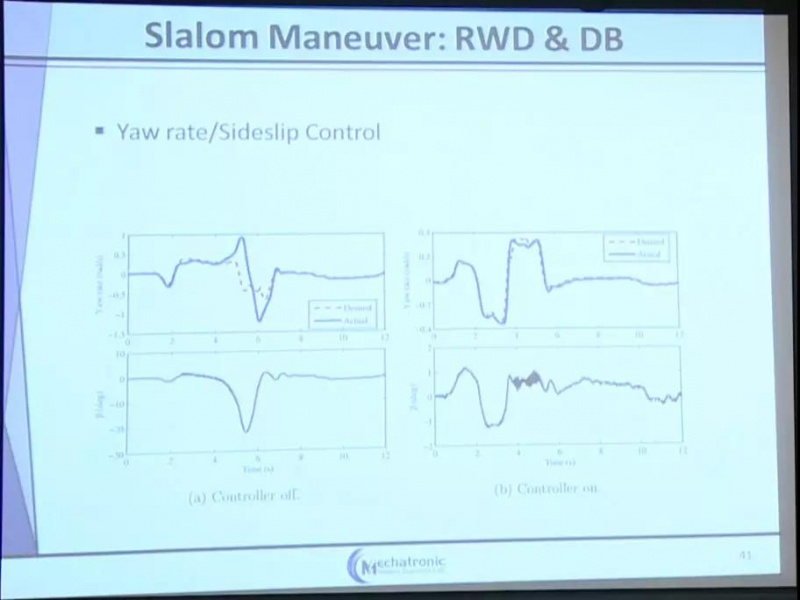
随后,我们将相同的控制器应用于具有完全不同的配置和控制系统的车辆中,这辆车使用后轮驱动(Rear Wheel Drive, RWD)和差动制动(Differential Braking, DB)。
进行相同的测试,左侧两图是没有安装控制器时的测试结果。可以看到,角速度的实际值变化无法完全符合期望值变化,同时侧滑角β的最小值低于-20°说明车辆的侧滑偏差非常大。而安装控制器以后,角速度的实际值能与期望值相符合,且β值的变化范围完全在1.5°以下,也就是说车辆处于良好的控制下。
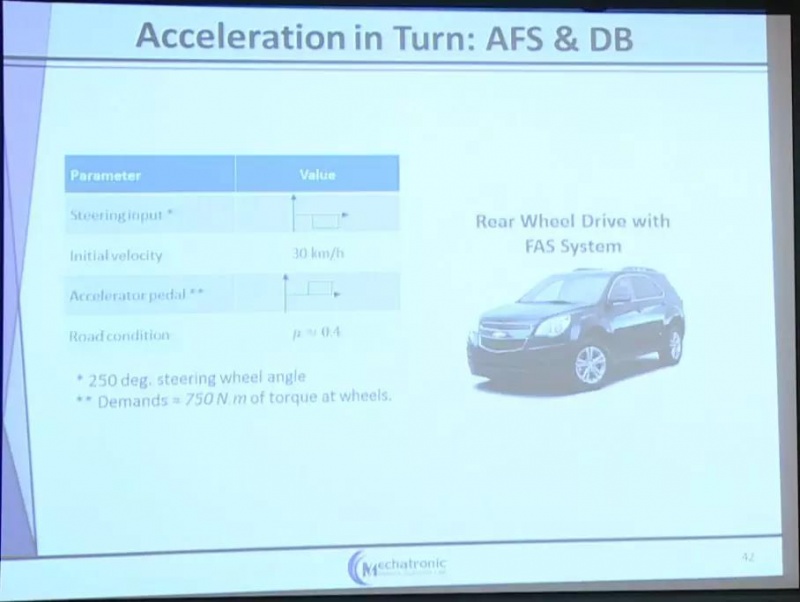
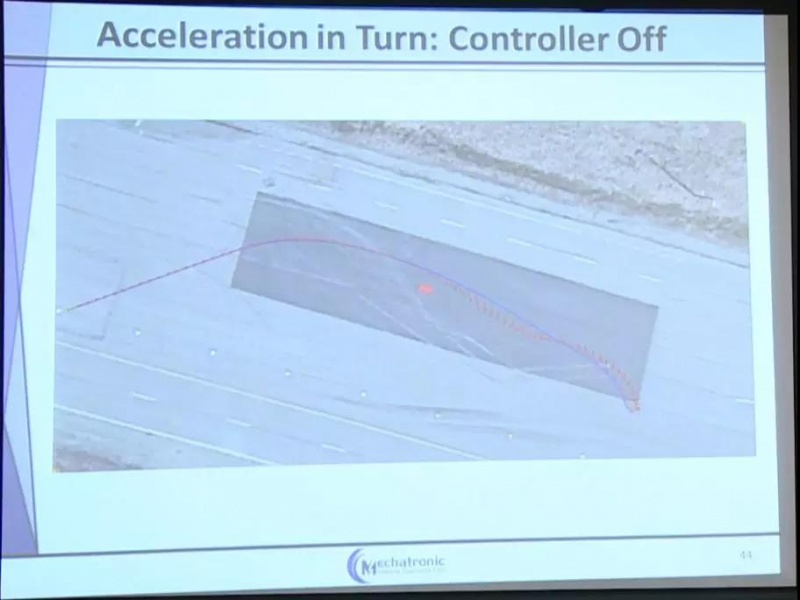
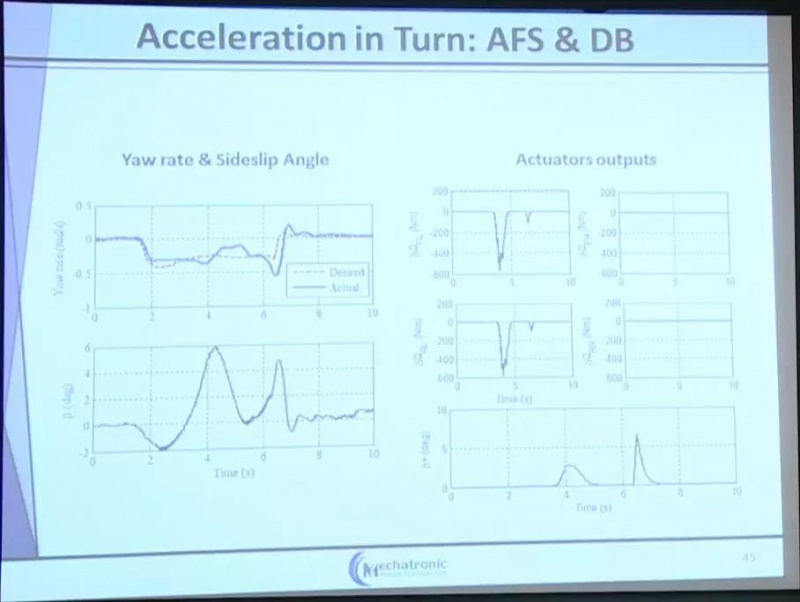
在另一种转弯加速(Acceleration in Turn)测试情景下,我们将完全相同的控制器安装在一辆包含两个驱动系统的车中。车辆用后轮驱动(Rear Wheel Drive, RWD)、主动前轮转向(Active Front Steering, AFS)和差动制动(Differential Braking, DB)。
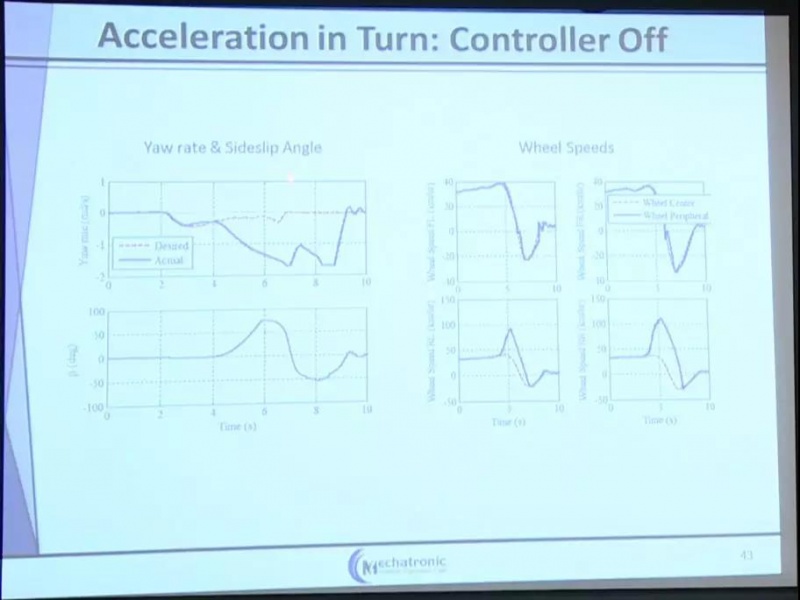
上图是在没有控制器情况下的测试结果,图中的红色虚线为期望的测试结果,蓝色实线则描述车辆的实际行驶状况。可以看到,左上图中角速度的实际测试结果极值非常大,并且左下图中侧滑角β值的最小值和最大值分别达到-50°和80°,说明车辆在这个测试情况下完全打滑失控。同时,车轮速度(wheel speed)的实际结果也存在较大偏差。
这幅图展示的就是车辆的实际行驶情况。方框外是干燥的路面,方框内则是湿滑的路面。车辆试图按照蓝色的轨迹行驶,红色轨迹则代表车辆的实际行驶路线。观察两条轨迹间的偏差可以发现,车辆从湿滑路面的中部开始打滑失控,而当行驶到湿滑路面的末端时,其实际行驶方向与目标方向间的侧滑角偏差达到了80°。
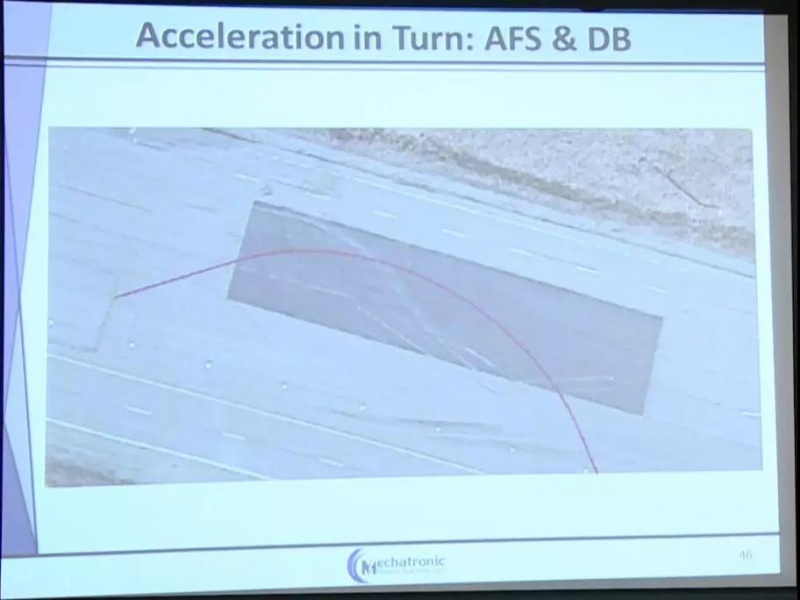
上图是安装控制器后的测试结果。这是一个非常困难的测试,车辆需要在湿滑的路面上行驶的同时进行全力加速转弯。但可以看到,实际结果能够较准确地按照期望进行变化。
这时车辆的实际行驶情况是,红色与蓝色轨迹完全重合。所以车辆在配有控制器时,实际行驶轨迹能够完全符合目标期望。
主要目标——车辆稳定控制的通用路径规划
Main Goals: Universal Path Planning with VehicleStability Control
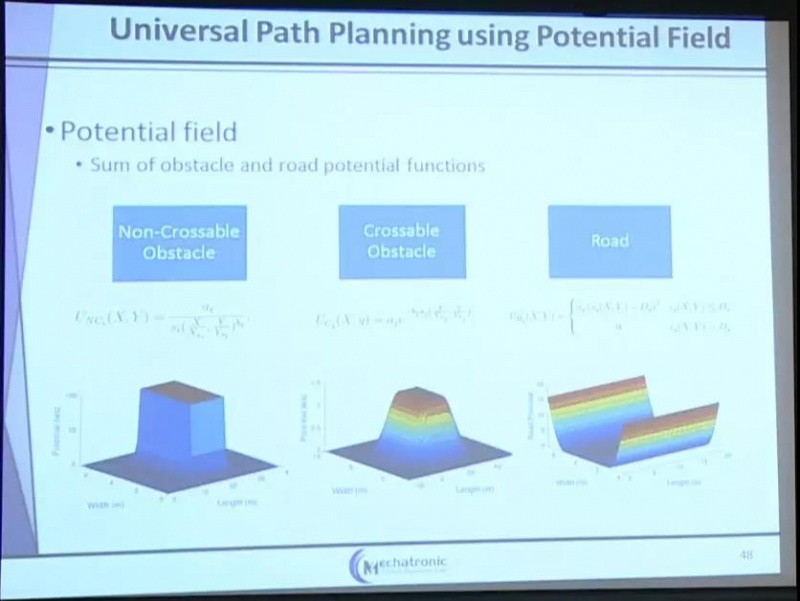
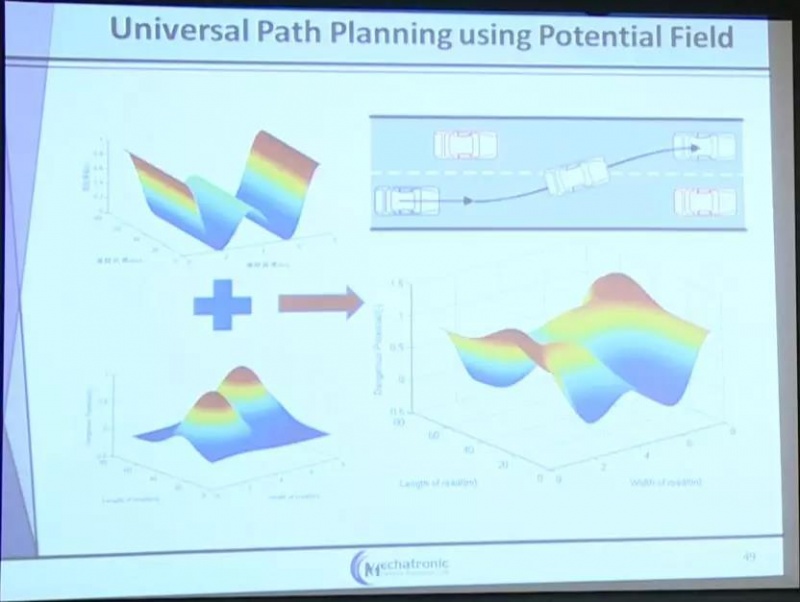
对于通用路径规划这一目标,我们利用势场(potentialfield)来进行相关研究。势场能够用于任何物体的描述,而物体的形状取决于自身的重要性。若物体具有很强的重要性,则将形成非常高的山脉,反之则将形成小丘陵。所以通过这种方式,可以生成不同的行驶状况情景,或将行驶路况环境转化为丘陵或山谷。
举例来说,在右上图中有五辆车行驶在车道上。通常为了保证车辆行驶的安全性,道路中线位置的地面会略微凸起,而道路边界部分的地面则具有明显较高的地势,如左上图所示。而行驶在道路上的每辆车,例如右上图中并排的两辆车,在势场中则显示为左下图中与山岳类似的形状。将左侧两幅道路状况图叠加,就会生成右下图中的图形。如果俯视观察这些图形,那么结果将会非常有趣。
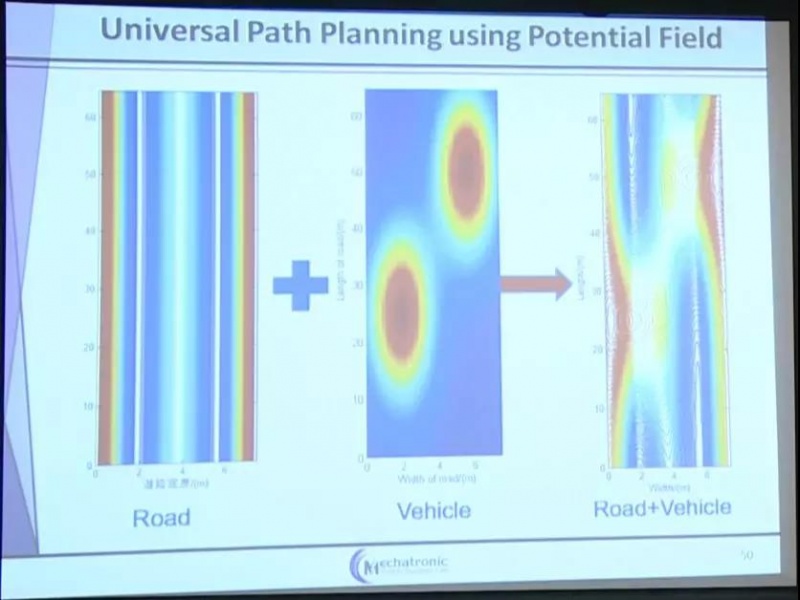
最左侧的图像代表道路(Road),图像利用颜色的过渡变化表示地势高低过渡变化,图中蓝色和红色区域分别表示低地势和高地势,也就是刚才所展示的路面地势状况。中间图像中的两个红色圆形图案表示车辆(Vehicle),蓝色背景表示道路。若将两幅图像叠加,那么所得结果将会与最右侧图像类似。
现在想象一下,若使水从上述图形的一端流入,则其将会流经较低的平面。也就是说,基于势场的方法寻找适合车辆的行驶路径就等同于在势场中寻找海拔最低的路面。通过最低海拔即可找到最佳路径,这就是我们所采用的整个研究思路。
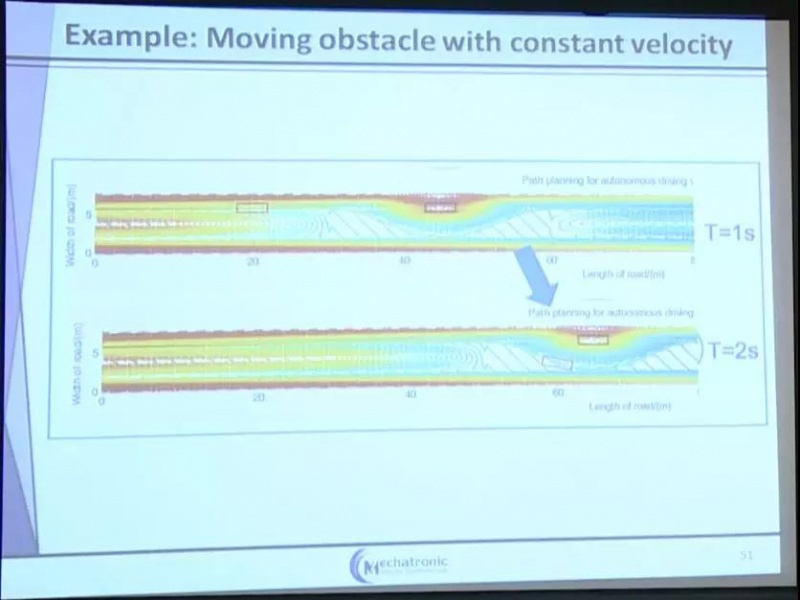
上图是我们研究的一个驾驶情况示例,图中的红色方框代表车辆,黑色方框代表以恒定速度移动的障碍物(moving obstacle with constant velocity)。现在车辆想要维持现有车速向右行驶,故需进行变道操作以越过障碍物。显然,利用势场的方法,车辆根据最低海拔找到了适合的行驶路线,由上图移动到下图所示的位置。
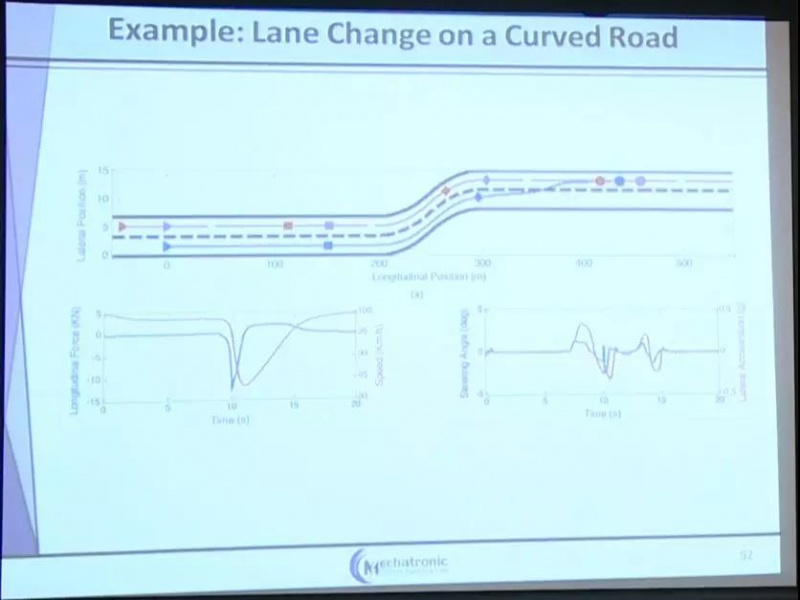
下面是另一个示例,用于研究车辆在弯曲道路上变换行驶车道的情况(lane change on a curved road),图中三种颜色的图标分别代表三台移动车辆。可以看到,蓝色图标所代表的车辆在向右行驶的过程中找到了合适的行驶路线并进行变车道操作。
另外在这个示例中,这种方法使我们不仅能够对移动方向进行控制,同时还能够对行驶速度进行调整。在下方两图中,蓝色曲线分别表示可进行调整的纵向力(longitudinal force)和转向角(steering angle),红色曲线分别表示车辆的速度(speed)和侧向加速度(lateral acceleration)。左下图中的蓝色曲线描绘的是车辆的刹车或加速控制情况,可以看到车辆在变换车道时其车速从近100Km/h骤降到约83Km/h,而在完成车道变换后车速又逐渐回升到100Km/h。
主要目标——碰撞减缓与控制
Main Goals: Crash Mitigation and Control
最后对于碰撞减缓(crash mitigation),我认为人们需要始终记住,自动驾驶并不意味着能够避免碰撞事故的发生。那么问题是,如何进行碰撞减缓才能将损害最小化?
对车祸事故严重程度(the severity of an accident)来说,其主要影响因素有车速(Speed of the crash)。其次还有障碍物的种类(Nature of the obstacle),比如障碍物属于大质量还是小质量固体?同时,车辆安全设备(Vehicle safety devices)和碰撞的方向(Direction of collision)也很重要,例如以45°角撞击所造成的碰撞事故将会使被撞车辆的损坏程度最大化。最后是车辆质量比(Mass ratio of the vehicles),例如轿车与卡车相撞所造成的损坏显然要比其与同类型轿车相撞严重得多。
我们可以做的是,利用这些相关因素以确保在将要发生碰撞的情况下,将事故损失最小化。上图就是一些相关研究示例。在这个场景中有三辆车,其中红车在行驶过程中突然改变行驶车道,而右侧的蓝车在其变道的同时没有足够的时间停车,所以显然蓝车将会发生碰撞事故。若其不采用任何碰撞减缓或路径规划措施,则结果将如左下图所示,蓝车为躲避红车而向左前方行驶,最后以45°的夹角撞击紫车或红车的侧面。
但按照右下图所示,碰撞损失最小的情况是蓝车从正后方撞击红车。因为蓝、红两车的相对速度最小,且追尾事故对相撞两车来说所造成的损失最小。故在红车变道时,蓝车应在全力刹车的同时迅速实施这项减缓措施,而不是改变行驶方向。
而在相同的情景中,如果前车为卡车而非轿车,那么减缓措施就需要进行相应的调整。因为从侧面撞击红车所造成的损失比从后方撞击卡车要小,所以蓝车的碰撞减缓方案应为改变行驶方向撞击红车。
总结
Summary
以上就是对我们在研发下一代车辆方面研究工作的概括性总结。总的来说,车辆由于交通方式、无人驾驶和共享经济等新变化以及不同传感器的增加而变得更越来越复杂。就目前来说,所有的组件或系统都为独立式设计,这意味着将其结合的运行效果并不理想,所以应尽量避免这种情况的发生。此外,我们需思考该如何利用当前的新型传感器、车辆通信以及物联网,这些都是使系统更加复杂的新挑战。但在作为挑战的同时,其也为车辆的安全和性能优化的进一步研究创造了新的机会。最后,我认为不能局限于车辆控制系统方面的原有研究思路,应构思统一且整体的新方法去解决问题。另外,还应该坚持构建基于模型的系统而非临时的专用系统。
以上就是今天讲座的全部内容,谢谢大家。
Q&A
Q1:我想请问教授您如何看待强化学习(Reinforcement Learning)?您会选择怎样将其应用于无人驾驶的研究中?
A1:在大多数情况下,学习方法(例如机器学习、深度学习和强化学习)和其他相关技术都应用于感知层面。因为人类利用自身的感官来感知车辆行驶环境的过程无法使用方程式描述,所以车辆一般通过学习过程进行感知。
而如果车辆的行驶环境信息已知,我更倾向于推导相关原理方程式或构建环境模型。为什么要利用学习方法来研究已知原理的简单事物呢?人们通常认为通过学习方法可以完成任何研究工作,但我不认为这个观点是正确的。当模型无法建立时应利用学习方法,但模型已知时为什么要使用它呢?例如,我曾见过有人用学习方法对钟摆的运动进行模拟仿真,为什么要用它来模拟符合微分方程的钟摆运动呢?
所以,应在无法对所研究的复杂事物进行具体公式推导时使用学习方法。不了解大脑与眼睛或耳朵等感官进行信息传递的具体方法过程,才是使用学习方法的原因。
Q2:我认为碰撞减缓是无人驾驶领域中非常有挑战性的研究问题。未来车辆的设计布局是否可能与现有车辆不同,例如没有驾驶座?
A2:这是我们需要进一步研究新事物。首先,这涉及许多伦理道德标准。刚才我只展示了从车辆碰撞损失角度来看明确的示例,而并没有考虑人类影响因素。但如果现在有两辆车,一辆车载有两名乘客,另一辆车只载有一名乘客。那么在无法避免碰撞的情况下,应该撞击哪辆车呢?又或者,一辆车载有年轻乘客,另一辆车载有老年乘客,那么又该撞击哪辆车呢?
显然,我并不能做出合理的判断。至少从现在看来,这些是非常难以回答的问题。具体情景的假设条件可能不同,但无论如何都需确保最低安全性,例如乘客需要系好安全带、驾驶员需要按一定思路将碰撞损失最小化。我不认为无人驾驶可以解决所有的交通问题,这是过于理想的想法。这在实际生活中是不可能发生的,我们需要现实一点。
无人驾驶是一种必然的发展趋势。想要将新概念融入现有模型或方法中的想法是好的,只需要明确的伦理道德标准就能确定具体该如何实施。但就目前来说,这些仍是我们不知道如何但未来一定能够解决的问题。
Q3:请问您如何看待最近Uber无人车的交通事故?您认为事故的发生与车辆感知系统有关吗?
A3:目前为止,还没有公布任何具体官方信息,我们所知道的是事故车辆在深夜行驶中撞击了一辆自行车。车辆制造商声称事故问题不在于激光雷达,其检测到了自行车,但车辆并没有做出相应的反应。有人认为感知系统的学习训练不够充分,以致其无法在黑暗的环境中获取足够的信息并识别出自行车。根据刚才所提到的学习方法,感知模块需对相关信息进行学习。如果没有构建对应情景进行学习,例如在不同的光照下识别自行车或其他事物,那么系统可能难以感知和理解周围的环境。
我认为导致事故发生的因素可能有很多,车辆感知系统的故障可能只是其中之一。系统的感知模块可能未在样本数据充足的条件下进行训练,以致其无法准确识别自行车,但车辆制造商声称激光雷达的确检测到了自行车。
Q4:请问您是否认为无人驾驶将完全取代人类驾驶?
A4:我不这么认为。因为很多人享受驾驶的过程,我有时候也很喜欢开车,所以我不认为无人驾驶的目标是使人类摆脱驾驶操作。事实上,无人驾驶应形成一个规范的过程。在受限的环境中或某些特定情况下,人们虽然坐在车中但更倾向于车辆自主驾驶而非由人类控制操作。
在未来100年内,经济发展的趋势并不是使每个人或每个家庭都拥有一辆车,至少在未来50年内可能不是。未来发展更趋向于共享经济,汽车将会类似于ofo这类共享单车。这是典型的共享经济,人们随时都能在需要时轻松获取自行车,自行车在使用完毕后可由其他人使用,这使得可能没有人会再购买自行车。我认为这可能也是汽车驾驶的发展趋势。
或许在未来,某些车辆在懂得如何自主驾驶的同时也配备方向盘等设施,使任何人都能够享受驾驶的过程。
【作者简介】
陈虹宇
中国科学院自动化研究所复杂系统管理与控制国家重点实验室硕士研究生。
主要研究方向为社会交通,机器学习和深度学习。



编辑推荐




最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
