




 广告
广告





















































中电昆辰朱晓章:自动代客泊车的厘米级定位
2018-07-11 12:03:17· 来源:佐思汽车研究

2018年6月21-22日,由布谷鸟科技、佐智汽车主办,艾拉比智能、ADI亚德诺半导体、索喜科技赞助支持的“2018第二届智能座舱与智能驾驶峰会”在深圳福田区绿景锦江酒店举办。中电昆辰董事长、电子科技大学副教授朱晓章博士在会上做了《鹰眼超宽带空间定位—自动代客泊车的厘米级定位》的主题演讲。
2018年6月21-22日,由布谷鸟科技、佐智汽车主办,艾拉比智能、ADI亚德诺半导体、索喜科技赞助支持的“2018第二届智能座舱与智能驾驶峰会”在深圳福田区绿景锦江酒店举办。中电昆辰董事长、电子科技大学副教授朱晓章博士在会上做了《鹰眼超宽带空间定位—自动代客泊车的厘米级定位》的主题演讲。

中电昆辰董事长、电子科技大学副教授 朱晓章博士
朱晓章:今年年底的时候,一些4S店将可以买到带有自主泊车功能的车型。多了两个字“自主”,驾驶员就不用再开车到车位前面,而只需要把车开到停车场的入口,然后车会自己去泊车。不管碰没碰,慢了还是快了,驾驶员都不用关心。当你要走的时候,用手机预约一下,车就会在路边等待,如果车在路边碰了,由主机厂负责。
我们就是为主机厂提供能自主泊车的功能,并可以量产的高精度定位传感器,名为鹰眼。技术路线上,我们用超宽带微波。
自动驾驶的标杆车型及定位传感器
说到驾驶员不动方向盘开车,永远离不开这几个自动驾驶的标杆车型。它们的车顶上都有各种各样一般买不到的复杂传感器,那么有哪些传感器呢?

来源:中电昆辰
LiDAR-SLAM,能发出很多条线的激光,较多的有64线或128线,激光扫描周围环境产生点云图像,然后通过不断比对每次点云的差别来获得车身相对移动的位置,或者通过比对基础地图来获得厘米级的定位。
RTK-GNSS,通过抗多径功能天线的增强卫星接收机,在城市中获得厘米级的定位。一般的卫星接收机不贵,但有抗多径功能天线的卫星接收机就很贵,可能上万。
360度环视SLAM,将整个车身周围一圈的画面高清录制下来,并且一帧一帧地比对它的移动距离。
RF-Radar SLAM,包括前视77GHz毫米波雷达,侧视或后视24GHz/77GHz毫米波雷达,根据雷达的距离分辨、速度分辨等形成图像,也能做SLAM。
这些传感器的目标都是希望获得厘米级的定位,有高精的地图、高精的定位后,车才可以自动驾驶。
整套传感器大概需要15K美元左右,也就是10多万人民币,这个价格已经远超过车厂量产和4S店可承受的价格,但是这些成本只是为了获得厘米级的定位。

来源:中电昆辰
鹰眼超宽带定位技术
目前我国不允许自动驾驶车辆在公共道路上进行测试,只允许在封闭场地内(或数量极少的指定道路上)测试,我们能提供很好的办法在场地内获得厘米级定位。中电昆辰的方案也已经应用到量产车型上,该车型在4月的北京车展已经发布,年底就能买到。
它是全球第一个具有人工智能自主泊车系统的量产车型,而且用户几乎感觉不到这个功能所带来的售价变化,同时它有正常的外观,和完美的场地自动驾驶功能。中电昆辰就是这套系统高精度定位的前装供应商。

来源:中电昆辰
中电昆辰的工作可以降低整车传感器的成本,通过鹰眼超宽带定位技术来实现厘米级的定位,系统会很简洁,又非常实用。这样厘米级的定位将不再需要传统传感器来支持:
Lidar:可以退化为激光探测仪。
RTK-GNSS:不需要抗多径的天线,单接收机就可以,也可支持座舱仪表。
环视SLAM:只需做车道线识别。
RF-Radar:只需做前车跟踪,类似于自适应巡航,这样的传感器在第一梯队的供应商那里只需要几百块。
由中电昆辰“鹰眼”来完成厘米级定位,其他具有量产能力的传感器来完成环境感知。一些非合作目标,比如停车场有人驾驶的车、小孩、工作人员、宠物,就由传统的传感器探测,本车在停车场的高精度定位则由鹰眼完成,这样整车的传感器将会是原来价格的1/10。因为我们的方案能降低相当多的成本,所以在年底会有两三个主机厂带自主泊车系统的车型量产。

来源:中电昆辰
量产及系统
我们在鲨鱼鳍里集成了自己的PCB,包括手机的4G天线、卫星接收天线,组成了为车辆提供高精度定位的量产部件。
我们还需要对停车场进行改造,就像我们买了iPhone,肯定要有3G、4G卡,有了数据流量手机才好用,大屏的优势才能发挥。完成后,车辆不仅知道自己在停车场的位置,同时还知道停车场其他自动驾驶车辆的位置。这相当于赛车游戏的小地图,你知道自己在哪儿,也知道竞争对手在哪儿,从而判断怎么超越它或者不碰到它。
测试数据
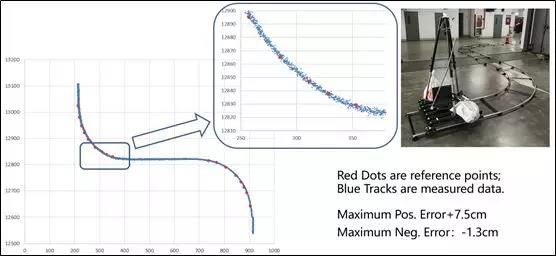
这是我们在现场的测试数据。首先是精度,下图右下角可以看到最大正差,最大的左偏是7厘米,最大的右偏是1.3厘米,加起来10厘米左右,也就是99.7%的3倍标准差。这意味着有99.7%的概率可以信任我们的定位,偏离真实的位置不会超过一个苹果那么大。
来源:中电昆辰
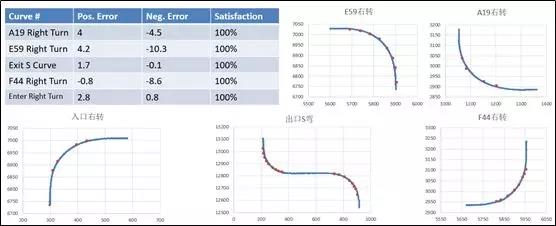
其他弯道以及直道我们也都做了测试,直道一共拉出去50~60米,在这么长的距离上左右方向偏离不超过3~4厘米。
这些基础的数据证明我们可完美解决地下车库的高精度定位,同时让车端的部件尽可能合理,不影响消费者的驾乘感受。
来源:中电昆辰
中电昆辰发展经历
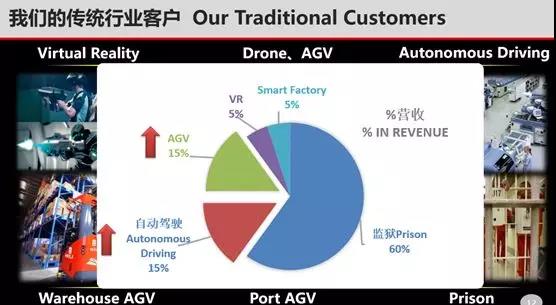
我们原本不是做汽车电子的,可以说是被动的加入到汽车电子洪流中。以前的客户利用我们的高精度定位技术,在场地里面做虚拟现实,多个玩家戴上头盔在场地里面打游戏、对战,无人机在室内飞行没有卫星定位,要做到高精度定位也需要我们的产品。
另外就是智慧工厂,在汽车生产线上有这样的应用,梅赛德斯奔驰在土耳其的卡车生产线用我们的设备对工人、车辆以及大型物料进行监督和跟踪。富士康用我们的产品来跟踪生产线上的手机,京东方也是我们的客户,还有在叉车的自动驾驶、港口机械的自动驾驶、监狱犯人看管等领域,都有我们传统的客户。正是因为有了在这些市场上的技术积累,我们才可以做到对停车场车辆进行高精度定位。
来源:中电昆辰
我们进入汽车电子的时候,面对非常大的挑战。原本工业级、消费者级的产品,如何达到汽车电子这样严酷的性能指标要求,和可靠性要求?我们组建了一个20~30人的团队,花了大概半年的时间,最终使已有领域的成熟技术达到了汽车电子的要求。客户要求-40℃到85℃,我们最终做到-60℃到135℃;客户要求1377小时的寿命实验,我们做到了2000小时,而且是三组;客户要求要达到2PPM的抽验,100PM的交付,我们做到100%的出厂验收。这些使我们这家原本不做汽车电子的企业,迅速成为了这个领域的定点单供。
未来社会道路应用系统结构设计
今天在地下车库做自动驾驶,不代表未来在社会道路上也一样能铺开,因为我们的基站在地下车库进行改造,而社会道路那么多,不可能完全做改造。我们要为未来做准备。
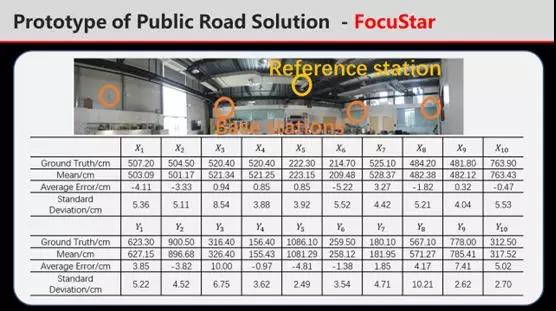
社会道路方案FocuStar
这是目前做的社会道路方案的原形系统(见下图)。我们和三大运营商合作,在道路上的路灯、交通标识灯、广告牌等路侧设备上附加我们的信标,车辆上有接收机,把GPS卫星信号传至路侧设备,使车辆在很近的距离上与信标通信,避免了电离层、高层建筑以及雨、雪、云、雾霾这类天气对卫星信号的影响。
来源:中电昆辰
这种方案对成本很敏感,因为卫星全球只需要几十颗,但是道路的基站、信标需要成千上万,我们必须为V2X系统的建设单位留下足够的空间。这部分不能采用卫星上的原子钟,我们就用一种特别的方式来做系统结构。
UBeacon是我们超宽带信号的发射站,黄色的Coordinator是参考站,参考站测试这些固定位置的时间不像原子钟那么精确,但是位置可以测得很准。同时,所有的信标和参考站都会把信息发给车辆接收端,车辆接收这些信息之后会解释自己的位置,并可达到5厘米的精度和每秒2000次的定位,这两个指标能保证车无论在高架桥上,还是有下穿或高楼林立的CBD区域中,都可以获得厘米级的定位,并且支持百公里每小时的车速。这是我们准备在未来阶段为主机厂提供技术支持的社会道路方案。
测试结果
下图是初步的测试结果,大家可以重点关注标准差,单位是厘米,在自己的房间里、实验场进行测试,都达到了鹰眼地下车库方案相同的效果,并且兼容ECU接口协议,这意味着主机厂为现在鹰眼地下车库方案做的软件接口的编写、控车逻辑的编写,在未来升级到FocuStar方案的时候是可以平滑兼容的。
来源:中电昆辰
最后,我们其实是一家传感器供应商,我们不控车,也不懂其他视觉传感器、卫星融合、激光雷达融合技术,我们是廉价好用的位置传感器供应商。我们和其他供应商一起,通过技术互补,提供可量产、消费者可承受、可放心使用、三四线可卖、不用经常返修的整合系统来支持主机厂。
谢谢!
提问环节
提问:您刚才讲的定位,是用基站吗?
朱晓章:对。
提问:这个基站是自己建还是跟运营商合作?
朱晓章:名字叫基站,但并不是手机基站,是我们自己做的,大概wifi盒子那样尺寸的小设备。这个设备放到停车场里面,用光纤互相连接,整个覆盖范围内可以达到位置获取的效果。
提问:所有做自动泊车服务的厂商都可以在你们那里购买一些设备?
朱晓章:对。
提问:可以透露一下你们做了多少吗?
朱晓章:在上海大概有10多个地库会做这样的升级改造,明年全国应该有几百个这样的地库。做共享汽车的公司,能够做得更快,也可能更多。
提问:非常感谢您给我们带来新的思路,关于成本的降低确实令人印象深刻。您所提到的车端成本,基站端成本是什么样的?基站端现在用哪个频段的无线电信号,国家是否开放?我想这涉及到商业化推广的过程。
朱晓章:目前停车场改造的成本,从停车场改造集成商的角度来看,他们认为没有任何问题,首先这部分成本不会转嫁到买车的消费者身上,其次这些停车场提供基础设施服务是有收入的,这样运营商就有动力配合主机厂一起做,同时主机厂也自己建(有自主泊车功能)地下车库。
我们收到有停车场运营商、地产商和主机厂的需求,这套方案一开始不是我们推动主机厂去做,而是被动参与。后来我们了解到各种各样的模式,发现甚至做共享汽车的机构也在做。而共享汽车不像共享单车那样,放在路边就行,他们要买车、建充电桩、买停车位,因此我们的定位系统在他们的总投入里是非常小的部分。
第二个问题,我们用的频段是国家规定的,超宽带通信用的3-6GHz和7-10GHz两个频段,符合国家电子频谱管理的要求。
提问:第一个问题,现在用差分基站很多,您说可以达到厘米级,这方面我们也和其他供应商有过交流。您现在确定的厘米级是只在很小的区域里,还是可以在整个通讯基站范围内,甚至做到整个市区或者更大的范围?
第二个问题,你们的方案是基于北斗还是基于GPS?因为很多差分基站都要和北斗做对标,这个方案是你们自己建的吗?
朱晓章:我们要在基站覆盖的范围内实现厘米级,如果这个场地里放四个小基站就可以把这片区域都定位到厘米级,我们的手表放在一起挨着就可以区分精度,比如监狱就是这样用的。如果在社会道路或者地库上用,那么地库和路边都要建基站,由于我们的信号必须满足通信要求,也就是车顶的鲨鱼鳍和停车场房顶挂的基站没有遮挡。手机找通讯基站,运营商可以找高楼建,楼的背后有绕射和折射也可以做,但我们不行。所以只有在直通条件下才能做到厘米级的精度,一般在监狱里发生遮挡通常是承诺50厘米左右的精度。
第二个问题,我们用超宽带实用脉冲,北斗GPS用的是L1频点窄带连续波信号,我们用的是无窄波的实用脉冲,3-6GHz的窄脉冲。这个脉冲的时间分辨率很高,所以才能做到室内、多径非常明显的环境下,依然获得电磁波传播路径的厘米级分辨率。这套方案的协议、信号体制、天线、射频收发、基站信号处理、光纤通信网络,全部都是我们自己做的。
提问:我们知道现在停车场里情况很复杂,特别是国内乱停乱放很多,停车场里还有其他的障碍物,比如购物车等,目前你的设备能不能处理这些复杂的情况?
朱晓章:这是很好的问题。主机厂用我们方案的时候,就希望只获得车辆自身相对地面参考坐标的坐标系,他们在车上还安装了其他传感器如环视摄像头,这个环视摄像头不需要做视觉SLAM和高精度定位,只用做泛物识别。泛物识别是指广泛意义的物体识别,比如有人过来、有人推车过来、有没有禁止左转、禁止右转的标线,这样的传感器很便宜。
还有近距离探测的激光雷达,也就是激光避障雷达,类似家用高端扫地机器人所使用的那种,遇到障碍物会停下来测距。车不需要64线、128线这种0.05度角分辨率的昂贵雷达来做位置探测,因为我们搞定了厘米级的定位,那么环境感知方面车厂就可以使用已量产的便宜的传感器来完成这件事。
我们就是和这些传感器技术互补,最终提供整车在混合环境下,达成异构的停车场,异构停车场可支持代客泊车。同时如果车是无人驾驶的,那么所有这些有人或无人的车、人、物就可以一起共同运行。这是由主机厂联合各家传感器厂商,以及做控制系统的厂商一起完成的事情。
中电昆辰董事长、电子科技大学副教授 朱晓章博士
朱晓章:今年年底的时候,一些4S店将可以买到带有自主泊车功能的车型。多了两个字“自主”,驾驶员就不用再开车到车位前面,而只需要把车开到停车场的入口,然后车会自己去泊车。不管碰没碰,慢了还是快了,驾驶员都不用关心。当你要走的时候,用手机预约一下,车就会在路边等待,如果车在路边碰了,由主机厂负责。
我们就是为主机厂提供能自主泊车的功能,并可以量产的高精度定位传感器,名为鹰眼。技术路线上,我们用超宽带微波。
自动驾驶的标杆车型及定位传感器
说到驾驶员不动方向盘开车,永远离不开这几个自动驾驶的标杆车型。它们的车顶上都有各种各样一般买不到的复杂传感器,那么有哪些传感器呢?
来源:中电昆辰
LiDAR-SLAM,能发出很多条线的激光,较多的有64线或128线,激光扫描周围环境产生点云图像,然后通过不断比对每次点云的差别来获得车身相对移动的位置,或者通过比对基础地图来获得厘米级的定位。
RTK-GNSS,通过抗多径功能天线的增强卫星接收机,在城市中获得厘米级的定位。一般的卫星接收机不贵,但有抗多径功能天线的卫星接收机就很贵,可能上万。
360度环视SLAM,将整个车身周围一圈的画面高清录制下来,并且一帧一帧地比对它的移动距离。
RF-Radar SLAM,包括前视77GHz毫米波雷达,侧视或后视24GHz/77GHz毫米波雷达,根据雷达的距离分辨、速度分辨等形成图像,也能做SLAM。
这些传感器的目标都是希望获得厘米级的定位,有高精的地图、高精的定位后,车才可以自动驾驶。
整套传感器大概需要15K美元左右,也就是10多万人民币,这个价格已经远超过车厂量产和4S店可承受的价格,但是这些成本只是为了获得厘米级的定位。
来源:中电昆辰
鹰眼超宽带定位技术
目前我国不允许自动驾驶车辆在公共道路上进行测试,只允许在封闭场地内(或数量极少的指定道路上)测试,我们能提供很好的办法在场地内获得厘米级定位。中电昆辰的方案也已经应用到量产车型上,该车型在4月的北京车展已经发布,年底就能买到。
它是全球第一个具有人工智能自主泊车系统的量产车型,而且用户几乎感觉不到这个功能所带来的售价变化,同时它有正常的外观,和完美的场地自动驾驶功能。中电昆辰就是这套系统高精度定位的前装供应商。
来源:中电昆辰
中电昆辰的工作可以降低整车传感器的成本,通过鹰眼超宽带定位技术来实现厘米级的定位,系统会很简洁,又非常实用。这样厘米级的定位将不再需要传统传感器来支持:
Lidar:可以退化为激光探测仪。
RTK-GNSS:不需要抗多径的天线,单接收机就可以,也可支持座舱仪表。
环视SLAM:只需做车道线识别。
RF-Radar:只需做前车跟踪,类似于自适应巡航,这样的传感器在第一梯队的供应商那里只需要几百块。
由中电昆辰“鹰眼”来完成厘米级定位,其他具有量产能力的传感器来完成环境感知。一些非合作目标,比如停车场有人驾驶的车、小孩、工作人员、宠物,就由传统的传感器探测,本车在停车场的高精度定位则由鹰眼完成,这样整车的传感器将会是原来价格的1/10。因为我们的方案能降低相当多的成本,所以在年底会有两三个主机厂带自主泊车系统的车型量产。
来源:中电昆辰
量产及系统
我们在鲨鱼鳍里集成了自己的PCB,包括手机的4G天线、卫星接收天线,组成了为车辆提供高精度定位的量产部件。
我们还需要对停车场进行改造,就像我们买了iPhone,肯定要有3G、4G卡,有了数据流量手机才好用,大屏的优势才能发挥。完成后,车辆不仅知道自己在停车场的位置,同时还知道停车场其他自动驾驶车辆的位置。这相当于赛车游戏的小地图,你知道自己在哪儿,也知道竞争对手在哪儿,从而判断怎么超越它或者不碰到它。
测试数据
这是我们在现场的测试数据。首先是精度,下图右下角可以看到最大正差,最大的左偏是7厘米,最大的右偏是1.3厘米,加起来10厘米左右,也就是99.7%的3倍标准差。这意味着有99.7%的概率可以信任我们的定位,偏离真实的位置不会超过一个苹果那么大。
来源:中电昆辰
其他弯道以及直道我们也都做了测试,直道一共拉出去50~60米,在这么长的距离上左右方向偏离不超过3~4厘米。
这些基础的数据证明我们可完美解决地下车库的高精度定位,同时让车端的部件尽可能合理,不影响消费者的驾乘感受。
来源:中电昆辰
中电昆辰发展经历
我们原本不是做汽车电子的,可以说是被动的加入到汽车电子洪流中。以前的客户利用我们的高精度定位技术,在场地里面做虚拟现实,多个玩家戴上头盔在场地里面打游戏、对战,无人机在室内飞行没有卫星定位,要做到高精度定位也需要我们的产品。
另外就是智慧工厂,在汽车生产线上有这样的应用,梅赛德斯奔驰在土耳其的卡车生产线用我们的设备对工人、车辆以及大型物料进行监督和跟踪。富士康用我们的产品来跟踪生产线上的手机,京东方也是我们的客户,还有在叉车的自动驾驶、港口机械的自动驾驶、监狱犯人看管等领域,都有我们传统的客户。正是因为有了在这些市场上的技术积累,我们才可以做到对停车场车辆进行高精度定位。
来源:中电昆辰
我们进入汽车电子的时候,面对非常大的挑战。原本工业级、消费者级的产品,如何达到汽车电子这样严酷的性能指标要求,和可靠性要求?我们组建了一个20~30人的团队,花了大概半年的时间,最终使已有领域的成熟技术达到了汽车电子的要求。客户要求-40℃到85℃,我们最终做到-60℃到135℃;客户要求1377小时的寿命实验,我们做到了2000小时,而且是三组;客户要求要达到2PPM的抽验,100PM的交付,我们做到100%的出厂验收。这些使我们这家原本不做汽车电子的企业,迅速成为了这个领域的定点单供。
未来社会道路应用系统结构设计
今天在地下车库做自动驾驶,不代表未来在社会道路上也一样能铺开,因为我们的基站在地下车库进行改造,而社会道路那么多,不可能完全做改造。我们要为未来做准备。
社会道路方案FocuStar
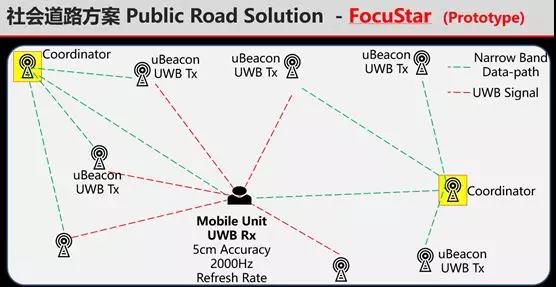
这是目前做的社会道路方案的原形系统(见下图)。我们和三大运营商合作,在道路上的路灯、交通标识灯、广告牌等路侧设备上附加我们的信标,车辆上有接收机,把GPS卫星信号传至路侧设备,使车辆在很近的距离上与信标通信,避免了电离层、高层建筑以及雨、雪、云、雾霾这类天气对卫星信号的影响。
来源:中电昆辰
这种方案对成本很敏感,因为卫星全球只需要几十颗,但是道路的基站、信标需要成千上万,我们必须为V2X系统的建设单位留下足够的空间。这部分不能采用卫星上的原子钟,我们就用一种特别的方式来做系统结构。
UBeacon是我们超宽带信号的发射站,黄色的Coordinator是参考站,参考站测试这些固定位置的时间不像原子钟那么精确,但是位置可以测得很准。同时,所有的信标和参考站都会把信息发给车辆接收端,车辆接收这些信息之后会解释自己的位置,并可达到5厘米的精度和每秒2000次的定位,这两个指标能保证车无论在高架桥上,还是有下穿或高楼林立的CBD区域中,都可以获得厘米级的定位,并且支持百公里每小时的车速。这是我们准备在未来阶段为主机厂提供技术支持的社会道路方案。
测试结果
下图是初步的测试结果,大家可以重点关注标准差,单位是厘米,在自己的房间里、实验场进行测试,都达到了鹰眼地下车库方案相同的效果,并且兼容ECU接口协议,这意味着主机厂为现在鹰眼地下车库方案做的软件接口的编写、控车逻辑的编写,在未来升级到FocuStar方案的时候是可以平滑兼容的。
来源:中电昆辰
最后,我们其实是一家传感器供应商,我们不控车,也不懂其他视觉传感器、卫星融合、激光雷达融合技术,我们是廉价好用的位置传感器供应商。我们和其他供应商一起,通过技术互补,提供可量产、消费者可承受、可放心使用、三四线可卖、不用经常返修的整合系统来支持主机厂。
谢谢!
提问环节
提问:您刚才讲的定位,是用基站吗?
朱晓章:对。
提问:这个基站是自己建还是跟运营商合作?
朱晓章:名字叫基站,但并不是手机基站,是我们自己做的,大概wifi盒子那样尺寸的小设备。这个设备放到停车场里面,用光纤互相连接,整个覆盖范围内可以达到位置获取的效果。
提问:所有做自动泊车服务的厂商都可以在你们那里购买一些设备?
朱晓章:对。
提问:可以透露一下你们做了多少吗?
朱晓章:在上海大概有10多个地库会做这样的升级改造,明年全国应该有几百个这样的地库。做共享汽车的公司,能够做得更快,也可能更多。
提问:非常感谢您给我们带来新的思路,关于成本的降低确实令人印象深刻。您所提到的车端成本,基站端成本是什么样的?基站端现在用哪个频段的无线电信号,国家是否开放?我想这涉及到商业化推广的过程。
朱晓章:目前停车场改造的成本,从停车场改造集成商的角度来看,他们认为没有任何问题,首先这部分成本不会转嫁到买车的消费者身上,其次这些停车场提供基础设施服务是有收入的,这样运营商就有动力配合主机厂一起做,同时主机厂也自己建(有自主泊车功能)地下车库。
我们收到有停车场运营商、地产商和主机厂的需求,这套方案一开始不是我们推动主机厂去做,而是被动参与。后来我们了解到各种各样的模式,发现甚至做共享汽车的机构也在做。而共享汽车不像共享单车那样,放在路边就行,他们要买车、建充电桩、买停车位,因此我们的定位系统在他们的总投入里是非常小的部分。
第二个问题,我们用的频段是国家规定的,超宽带通信用的3-6GHz和7-10GHz两个频段,符合国家电子频谱管理的要求。
提问:第一个问题,现在用差分基站很多,您说可以达到厘米级,这方面我们也和其他供应商有过交流。您现在确定的厘米级是只在很小的区域里,还是可以在整个通讯基站范围内,甚至做到整个市区或者更大的范围?
第二个问题,你们的方案是基于北斗还是基于GPS?因为很多差分基站都要和北斗做对标,这个方案是你们自己建的吗?
朱晓章:我们要在基站覆盖的范围内实现厘米级,如果这个场地里放四个小基站就可以把这片区域都定位到厘米级,我们的手表放在一起挨着就可以区分精度,比如监狱就是这样用的。如果在社会道路或者地库上用,那么地库和路边都要建基站,由于我们的信号必须满足通信要求,也就是车顶的鲨鱼鳍和停车场房顶挂的基站没有遮挡。手机找通讯基站,运营商可以找高楼建,楼的背后有绕射和折射也可以做,但我们不行。所以只有在直通条件下才能做到厘米级的精度,一般在监狱里发生遮挡通常是承诺50厘米左右的精度。
第二个问题,我们用超宽带实用脉冲,北斗GPS用的是L1频点窄带连续波信号,我们用的是无窄波的实用脉冲,3-6GHz的窄脉冲。这个脉冲的时间分辨率很高,所以才能做到室内、多径非常明显的环境下,依然获得电磁波传播路径的厘米级分辨率。这套方案的协议、信号体制、天线、射频收发、基站信号处理、光纤通信网络,全部都是我们自己做的。
提问:我们知道现在停车场里情况很复杂,特别是国内乱停乱放很多,停车场里还有其他的障碍物,比如购物车等,目前你的设备能不能处理这些复杂的情况?
朱晓章:这是很好的问题。主机厂用我们方案的时候,就希望只获得车辆自身相对地面参考坐标的坐标系,他们在车上还安装了其他传感器如环视摄像头,这个环视摄像头不需要做视觉SLAM和高精度定位,只用做泛物识别。泛物识别是指广泛意义的物体识别,比如有人过来、有人推车过来、有没有禁止左转、禁止右转的标线,这样的传感器很便宜。
还有近距离探测的激光雷达,也就是激光避障雷达,类似家用高端扫地机器人所使用的那种,遇到障碍物会停下来测距。车不需要64线、128线这种0.05度角分辨率的昂贵雷达来做位置探测,因为我们搞定了厘米级的定位,那么环境感知方面车厂就可以使用已量产的便宜的传感器来完成这件事。
我们就是和这些传感器技术互补,最终提供整车在混合环境下,达成异构的停车场,异构停车场可支持代客泊车。同时如果车是无人驾驶的,那么所有这些有人或无人的车、人、物就可以一起共同运行。这是由主机厂联合各家传感器厂商,以及做控制系统的厂商一起完成的事情。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
