




 广告
广告





















































车载以太网通讯测试:洞见底层,终见真章
2018-07-20 15:46:38· 来源:Vector维克多

和传统车载总线CAN/LIN/FlexRay相比,全新的车载以太网(AutomotiveEthernet)不仅拥有更高的传输速率(e.g.100Mb/s),更因其点对点的网络拓扑结构,从而对开发和测试工作,提出了全新的技术需求。本篇文章,将基于Vector最新的车载以太网接口卡(VN5640),系统地描述车载以太网络开发、测试环节中,所面临的一系列特有技术难点。同时,通过搭建合理的软硬件平台,在车载以太网技术约束条件下,最大程度优化开发、仿真、测试各个环节。
和传统车载总线CAN/LIN/FlexRay相比,全新的车载以太网(AutomotiveEthernet)不仅拥有更高的传输速率(e.g.100Mb/s),更因其点对点的网络拓扑结构,从而对开发和测试工作,提出了全新的技术需求。本篇文章,将基于Vector最新的车载以太网接口卡(VN5640),系统地描述车载以太网络开发、测试环节中,所面临的一系列特有技术难点。同时,通过搭建合理的软硬件平台,在车载以太网技术约束条件下,最大程度优化开发、仿真、测试各个环节。
车载以太网的最大优势,在于其极高的传输带宽,从而可以最大程度满足当前及未来各类车载通讯应用,对数据传输带宽的需求,例如自动驾驶系统和ADAS需要大量的图像数据和雷达数据。在ECU刷写方面,更叫看重省时高效且成本低廉的数据传输技术。依托车载以太网物理层技术:全双工100base-T1(OPEN Alliance Broad-Reach)非屏蔽双绞线,使得成本较低、便于布置的车载以太网,在量产车上大面积使用成为可能。它可以实现全双工100Mb/s传输速率,从而使得双向合计传输理论带宽达到了200Mb/s。
基于交换机的点对点连接
车载以太网在传输带宽上的极大提升,是建立在点对点通讯拓扑结构基础上的。与传统CAN/LIN/FlexRay的总线型拓扑结构不同,以太网中的通讯节点,或点对点直连,或通过交换机(Switch)间接相连。整个网络中各节点的连接方式不同,会极大影响报文收发传输路径,进而影响到传输延时。目前基于以太网通信的AVB(Audio Video Bridging)和TSN(Time Sensitive Networking)协议,正是充分考虑到在以太网通信应用中,节点及交换机对于报文收发延迟的不可控,引入了全新的“数据包优先级”和“时间同步”特性,从而丰富现有及未来车载以太网通信应用,尤其是对时间敏感的信息娱乐及安全数据通信应用,会带来巨大红利。
所有这些明显增加的复杂性对相关的网络开发测试和仿真带来了一定的影响。通过测试和仿真工具,便捷的网络访问一直是开发过程中的一个重要方面,以太网也不例外。然而以太网不像其他网络那样有一条物理公共信号线,供同一网段内各个节点进行数据报文收发,这导致一个问题:硬件接口应当具备何种能力、特性,才能满足目前及将来的车载以太网测试、仿真需求?
尽可能降低测试设备对原有网络通信的影响
车载以太网通信接口卡技术要求,与其他传统车载通信接口卡并无本质不同:
硬件方面,外壳及各个插拔连接口需结构可靠、耐用,可满足室内外和车辆上的温度变化需求;软件方面,既可单纯监听网络通信,也可在网络中主动发送自定义报文,并在此过程中,始终确保以太网报文时戳的精准性,同时还能与其他总线系统或通信接口卡保持时钟同步。
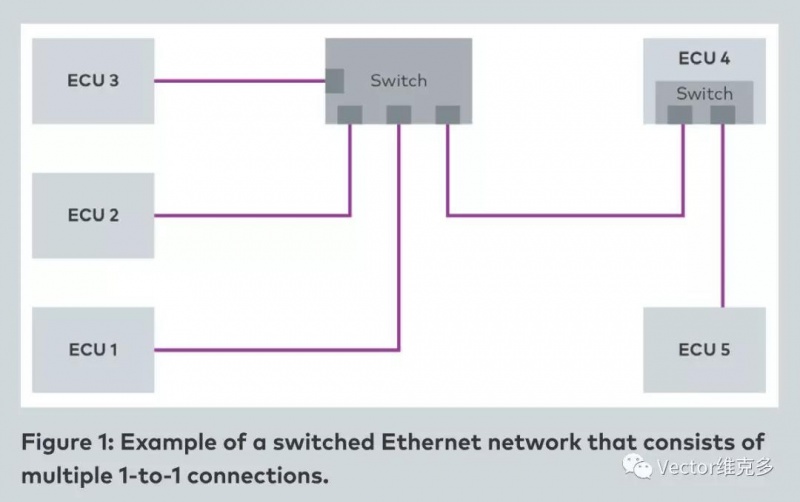
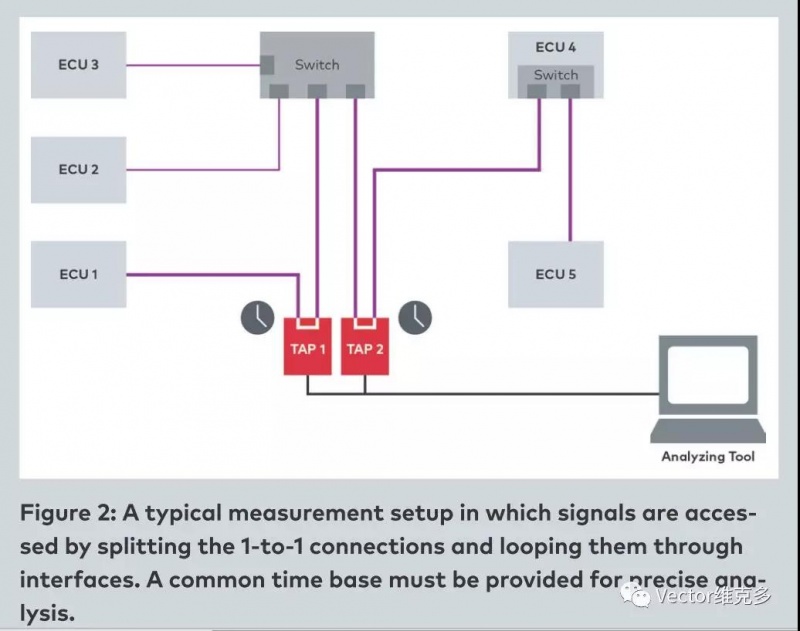
如图1所示,基于交换机通信的以太网络,由一系列点对点物理连接所构成。即便能保证测试设备接入这类全双工通信线路时阻抗足够高,也无法实现简单监听,因为只有对应的发送节点,通过比较自己发送的信号波形和线路上已经叠加后的波形,才能最终解析出对方节点发送给自己的信号数据。所以,目前只能通过将测试设备串联进被测数据线路的方式,才能有效观测或影响线路两端节点的通信。这类测试设备(如图2)一般称之为“TAP(TestAccess Point测试接入点)”,它由至少两个以太网口和上位机连接接口所构成,每两个以太网口,可接入一路以太网线路。TAP主要有两类工作模式:被动监听及主动干预。被动监听模式下,TAP工作在通信物理层,原封不动转发双向报文,包括传输错误的以太网包,并且尽可能稳定/降低不可避免的转发延时;主动干预模式下,TAP工作在数据链路层,从而可以干预节点通信,例如修改报文的数据场数据。
(图1)
(图2)
功能开发以及全网络通信观测
在单纯的功能开发阶段,一个TAP往往就已足够。因为在此阶段,主要关注点在于两个网络节点之间,如ECU到ECU或ECU到交换机。此时测试开发工具既可简单观测通信,也可仿真其他功能ECU,进行报文收发,还可以施加额外所需干扰。但如果测试仿真关注点扩大至更加复杂的整个网络系统(如图3),那么对于测试设备的要求就会大大提高。例如,在交换机之间传输数据的时间,以及详细的屏蔽信息和MAC地址表信息。更进一步,如果测试中还需要用到多个不同网络接口卡,那么还需要有相应的同步机制,从而保证不同设备收发报文的时间戳同步。
此外,在网络拓扑上,以太网也具有很大的挑战。假设在对单节点的测试过程中,需要PC机仿真两个其他通信节点。但由于PC机往往只有一个TCP/IP通信协议栈,因此导致所有发送报文的IP地址和MAC地址相同。如此一来,从被测节点角度无法区分接收到的报文,来自哪个仿真节点。当然,也可以通过修改ECU达到测试目的,但这显然不是一种合理、长久、高效的解决方案。
(图3)
高效的软硬件工具解决复杂问题
这一难点可以通过改进测试工具本身得到有效解决,即测试工具可以为每个仿真ECU灵活配置独立的TCP/IP通信协议栈,从而可以有效仿真通信场景(如图4)。但是,这仅仅解决了前期多节点仿真的困难。在后期多个真实节点测试阶段,测试系统应当具备何种功能特性,才能满足测试要求呢?对于熟悉传统CAN总线测试的工程师来说,下意识想到的方法可能是利用软件屏蔽某个仿真节点功能,同时将对应的真实ECU连接到物理通信线路上。但这种在传统CAN总线中切实可行的仿真/真实节点切换测试方法,在以太网络中是行不通的。正如我们反复强调的,以太网通信和传统总线型通信的最大不同点,在于其独特的点对点连接方式:新加入的真实节点,只能通过交换机进行连接,而不能直接连接到现有物理线路上。
(图4)
丰富的以太网硬件接口
为了满足用户对于高性能多通道车载以太网硬件接口的要求,测试系统必须具备交换机功能,并且网口足够多,才能满足多(仿真/真实)节点车载以太网络测试需求。所以性能良好、灵活可配的交换机功能,是车载以太网测试工具的基本要求。交换机的核心本质功能就是报文发送,并且通过FPGA方式,可以进一步方便、灵活地实现各类应用功能配置和扩展,从而更好地满足开发、测试各个阶段的不同需求。事实上,在最基本的交换机功能基础上,测试系统除了报文转发功能,还应该具备上文提到的物理层旁通和数据链路层旁通功能,并在测试过程中,随时访问获取以太网物理层接口的各类实时信息。在监视时对于常规交换机过滤掉的损坏帧可以通过本机访问总线收发器的以太网帧查看总线上的问题,从而可以全面了解物理层信号线路上传递的原始信号数据以及ECU端最终接收到的数据。
满足车载以太网仿真测试应用的接口卡VN5640
在充分考虑上诉各类功能应用基础上,Vector开发出了全新一代的车载以太网接口卡VN5640(如图五)。与上一代车载以太网接口卡VN5610相比(2路CAN,2路100base-TX/1000base-T/BroadR_Reach),VN5640更侧重针对整车层面多网络仿真及测量需求,它配备有16路以太网通道(包括12路BroadR_Reach和4路100base-TX/1000base-T)和两路CAN通道,可提供多种基于不同高层协议的报文过滤机制,既保证了仿真测试的正常进行,同时还可大幅有效降低软件端的仿真测试负载。除了常规基于上位机的接口卡应用,VN5640还支持脱离PC的独立工作模式,如RJ45/BroadR_Reach物理层自动转换功能。未来通过更新硬件驱动将支持更多的新功能,例如配合支持以太网接口的行车记录仪,从而记录整车以太网报文。与CANoe.OptionEthernet配合使用,则可以最大程度地利用VN5640各种功能,了解更多额外的报文传输信息以及交换机功能相关信息。

(图5)
总结与展望
相比传统CAN/LIN/FlexRay,车载以太网开发、测试、仿真难度更大,更加复杂,相关测试开发工具也有所不同。针对这些特殊要求而开发的接口卡(e.g. VN5610/5640),搭配功能强大的上位机软件CANoe/CANalyzer,可以有效简化并加快开发、测试进程。
为了进一步满足车载通讯应用对带宽需求,IEEE已着手开发下一代千兆车载以太网。VN5640在开发阶段,就已充分考虑到今后可能出现的新物理层升级。一旦有新物理层技术问世,可以灵活升级切换。对于AVB、TSN等新技术的到来,则可以通过升级上位机软件以及接口卡固件驱动的方式,始终与最新最前沿技术保持同步。
车载以太网的最大优势,在于其极高的传输带宽,从而可以最大程度满足当前及未来各类车载通讯应用,对数据传输带宽的需求,例如自动驾驶系统和ADAS需要大量的图像数据和雷达数据。在ECU刷写方面,更叫看重省时高效且成本低廉的数据传输技术。依托车载以太网物理层技术:全双工100base-T1(OPEN Alliance Broad-Reach)非屏蔽双绞线,使得成本较低、便于布置的车载以太网,在量产车上大面积使用成为可能。它可以实现全双工100Mb/s传输速率,从而使得双向合计传输理论带宽达到了200Mb/s。
基于交换机的点对点连接
车载以太网在传输带宽上的极大提升,是建立在点对点通讯拓扑结构基础上的。与传统CAN/LIN/FlexRay的总线型拓扑结构不同,以太网中的通讯节点,或点对点直连,或通过交换机(Switch)间接相连。整个网络中各节点的连接方式不同,会极大影响报文收发传输路径,进而影响到传输延时。目前基于以太网通信的AVB(Audio Video Bridging)和TSN(Time Sensitive Networking)协议,正是充分考虑到在以太网通信应用中,节点及交换机对于报文收发延迟的不可控,引入了全新的“数据包优先级”和“时间同步”特性,从而丰富现有及未来车载以太网通信应用,尤其是对时间敏感的信息娱乐及安全数据通信应用,会带来巨大红利。
所有这些明显增加的复杂性对相关的网络开发测试和仿真带来了一定的影响。通过测试和仿真工具,便捷的网络访问一直是开发过程中的一个重要方面,以太网也不例外。然而以太网不像其他网络那样有一条物理公共信号线,供同一网段内各个节点进行数据报文收发,这导致一个问题:硬件接口应当具备何种能力、特性,才能满足目前及将来的车载以太网测试、仿真需求?
尽可能降低测试设备对原有网络通信的影响
车载以太网通信接口卡技术要求,与其他传统车载通信接口卡并无本质不同:
硬件方面,外壳及各个插拔连接口需结构可靠、耐用,可满足室内外和车辆上的温度变化需求;软件方面,既可单纯监听网络通信,也可在网络中主动发送自定义报文,并在此过程中,始终确保以太网报文时戳的精准性,同时还能与其他总线系统或通信接口卡保持时钟同步。
如图1所示,基于交换机通信的以太网络,由一系列点对点物理连接所构成。即便能保证测试设备接入这类全双工通信线路时阻抗足够高,也无法实现简单监听,因为只有对应的发送节点,通过比较自己发送的信号波形和线路上已经叠加后的波形,才能最终解析出对方节点发送给自己的信号数据。所以,目前只能通过将测试设备串联进被测数据线路的方式,才能有效观测或影响线路两端节点的通信。这类测试设备(如图2)一般称之为“TAP(TestAccess Point测试接入点)”,它由至少两个以太网口和上位机连接接口所构成,每两个以太网口,可接入一路以太网线路。TAP主要有两类工作模式:被动监听及主动干预。被动监听模式下,TAP工作在通信物理层,原封不动转发双向报文,包括传输错误的以太网包,并且尽可能稳定/降低不可避免的转发延时;主动干预模式下,TAP工作在数据链路层,从而可以干预节点通信,例如修改报文的数据场数据。
(图1)
(图2)
功能开发以及全网络通信观测
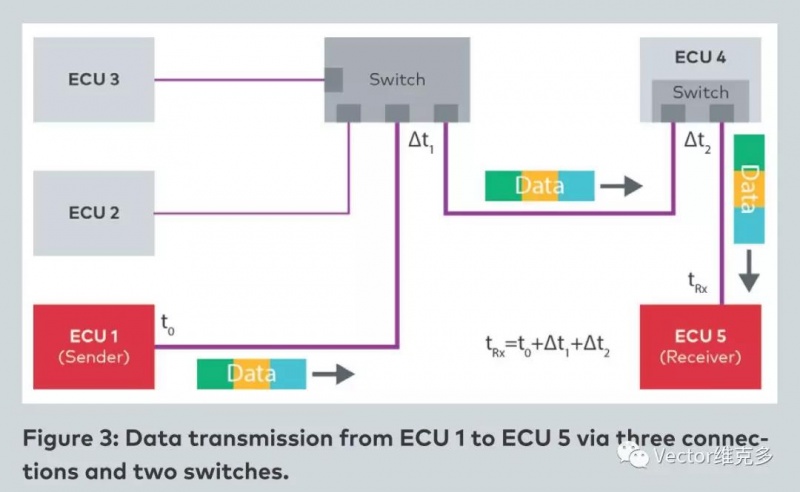
在单纯的功能开发阶段,一个TAP往往就已足够。因为在此阶段,主要关注点在于两个网络节点之间,如ECU到ECU或ECU到交换机。此时测试开发工具既可简单观测通信,也可仿真其他功能ECU,进行报文收发,还可以施加额外所需干扰。但如果测试仿真关注点扩大至更加复杂的整个网络系统(如图3),那么对于测试设备的要求就会大大提高。例如,在交换机之间传输数据的时间,以及详细的屏蔽信息和MAC地址表信息。更进一步,如果测试中还需要用到多个不同网络接口卡,那么还需要有相应的同步机制,从而保证不同设备收发报文的时间戳同步。
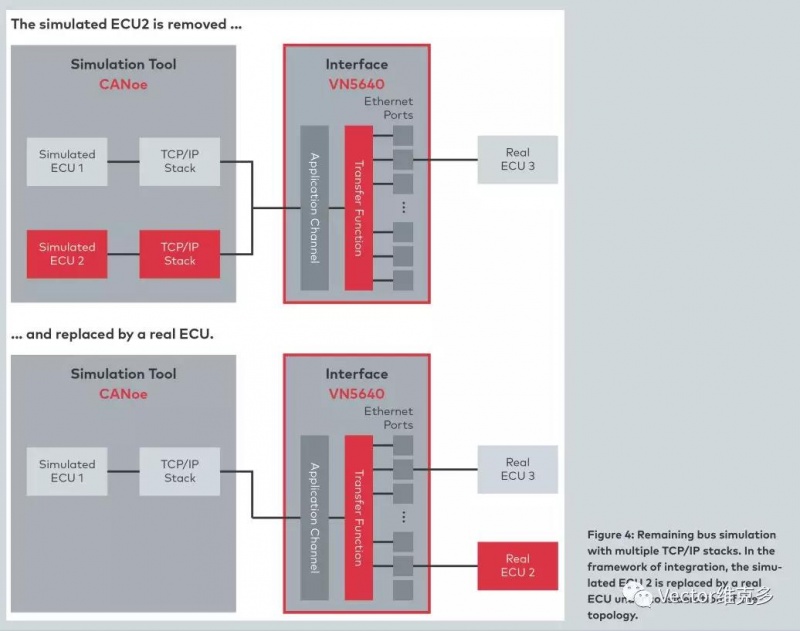
此外,在网络拓扑上,以太网也具有很大的挑战。假设在对单节点的测试过程中,需要PC机仿真两个其他通信节点。但由于PC机往往只有一个TCP/IP通信协议栈,因此导致所有发送报文的IP地址和MAC地址相同。如此一来,从被测节点角度无法区分接收到的报文,来自哪个仿真节点。当然,也可以通过修改ECU达到测试目的,但这显然不是一种合理、长久、高效的解决方案。
(图3)
高效的软硬件工具解决复杂问题
这一难点可以通过改进测试工具本身得到有效解决,即测试工具可以为每个仿真ECU灵活配置独立的TCP/IP通信协议栈,从而可以有效仿真通信场景(如图4)。但是,这仅仅解决了前期多节点仿真的困难。在后期多个真实节点测试阶段,测试系统应当具备何种功能特性,才能满足测试要求呢?对于熟悉传统CAN总线测试的工程师来说,下意识想到的方法可能是利用软件屏蔽某个仿真节点功能,同时将对应的真实ECU连接到物理通信线路上。但这种在传统CAN总线中切实可行的仿真/真实节点切换测试方法,在以太网络中是行不通的。正如我们反复强调的,以太网通信和传统总线型通信的最大不同点,在于其独特的点对点连接方式:新加入的真实节点,只能通过交换机进行连接,而不能直接连接到现有物理线路上。
(图4)
丰富的以太网硬件接口
为了满足用户对于高性能多通道车载以太网硬件接口的要求,测试系统必须具备交换机功能,并且网口足够多,才能满足多(仿真/真实)节点车载以太网络测试需求。所以性能良好、灵活可配的交换机功能,是车载以太网测试工具的基本要求。交换机的核心本质功能就是报文发送,并且通过FPGA方式,可以进一步方便、灵活地实现各类应用功能配置和扩展,从而更好地满足开发、测试各个阶段的不同需求。事实上,在最基本的交换机功能基础上,测试系统除了报文转发功能,还应该具备上文提到的物理层旁通和数据链路层旁通功能,并在测试过程中,随时访问获取以太网物理层接口的各类实时信息。在监视时对于常规交换机过滤掉的损坏帧可以通过本机访问总线收发器的以太网帧查看总线上的问题,从而可以全面了解物理层信号线路上传递的原始信号数据以及ECU端最终接收到的数据。
满足车载以太网仿真测试应用的接口卡VN5640
在充分考虑上诉各类功能应用基础上,Vector开发出了全新一代的车载以太网接口卡VN5640(如图五)。与上一代车载以太网接口卡VN5610相比(2路CAN,2路100base-TX/1000base-T/BroadR_Reach),VN5640更侧重针对整车层面多网络仿真及测量需求,它配备有16路以太网通道(包括12路BroadR_Reach和4路100base-TX/1000base-T)和两路CAN通道,可提供多种基于不同高层协议的报文过滤机制,既保证了仿真测试的正常进行,同时还可大幅有效降低软件端的仿真测试负载。除了常规基于上位机的接口卡应用,VN5640还支持脱离PC的独立工作模式,如RJ45/BroadR_Reach物理层自动转换功能。未来通过更新硬件驱动将支持更多的新功能,例如配合支持以太网接口的行车记录仪,从而记录整车以太网报文。与CANoe.OptionEthernet配合使用,则可以最大程度地利用VN5640各种功能,了解更多额外的报文传输信息以及交换机功能相关信息。
(图5)
总结与展望
相比传统CAN/LIN/FlexRay,车载以太网开发、测试、仿真难度更大,更加复杂,相关测试开发工具也有所不同。针对这些特殊要求而开发的接口卡(e.g. VN5610/5640),搭配功能强大的上位机软件CANoe/CANalyzer,可以有效简化并加快开发、测试进程。
为了进一步满足车载通讯应用对带宽需求,IEEE已着手开发下一代千兆车载以太网。VN5640在开发阶段,就已充分考虑到今后可能出现的新物理层升级。一旦有新物理层技术问世,可以灵活升级切换。对于AVB、TSN等新技术的到来,则可以通过升级上位机软件以及接口卡固件驱动的方式,始终与最新最前沿技术保持同步。







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
