




 广告
广告





















































分布式驱动电动汽车动力学控制
2018-07-25 17:21:16· 来源:同济智能汽车研究所

电动化已经成为汽车发展的必然趋势。为了更好地实现电动汽车高效节能与主动安全的目标,车辆行驶动力学控制装置一直是汽车工业研发的焦点。基于轮边或轮毂电机的分布式驱动电动汽车(图1)具有可控性好、传动链短、结构紧凑、车内空间利用率高等优点。
电动化已经成为汽车发展的必然趋势。为了更好地实现电动汽车高效节能与主动安全的目标,车辆行驶动力学控制装置一直是汽车工业研发的焦点。基于轮边或轮毂电机的分布式驱动电动汽车(图1)具有可控性好、传动链短、结构紧凑、车内空间利用率高等优点。
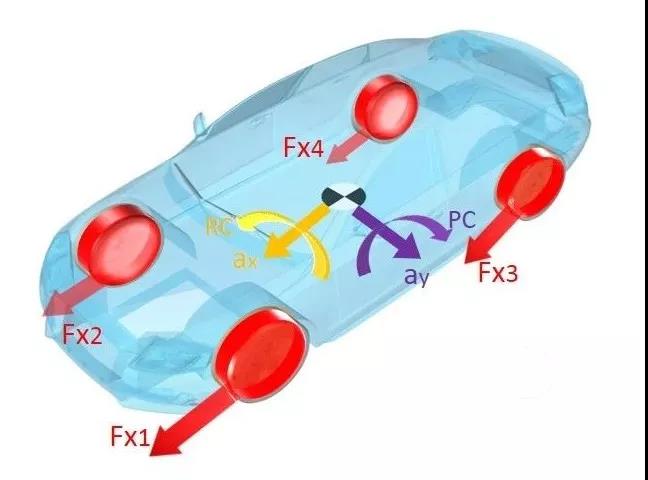
图1 分布式驱动电动汽车构型
与传统内燃机车辆相比,分布式驱动电动汽车取消了变速器、差速器等复杂的传统系统,传动效率更高;而且各个车轮的驱动电机均能独立控制,通过电机转矩的合理分配,充分利用电机高效区间,并结合回馈制动策略,能够提高车辆的经济性。分布式驱动电动汽车可以在电机能力范围内精确、快速地实现单个车轮驱制动力矩控制和轴间、轮间转矩分配控制,便于实现先进动力学控制功能:通过单个车轮驱动力和制动力的独立控制可以实现制动防抱死(Antilock Brake System,ABS)、驱动防滑(Acceleration Slip Regulation,ASR)功能,通过直接横摆力矩控制实现操纵性改善控制(Handling Improvement Controller,HIC)、电子稳定性控制功能(Electronic Stability Controller,ESC),提高车辆主动安全性能;同时结合电机转矩信息获得路面附着系数等环境参数以及质量、车速等车辆关键参数和状态信息,改善车辆动力学性能;独立驱/制动过程中悬架产生的垂向反作用力可以影响车身的姿态角(俯仰、侧倾),改善车辆的平顺性。
驱动防滑与制动防抱死控制
根据轮胎动力学特性,当车轮快速滑转和抱死时,轮胎附着能力严重恶化,车轮和车辆有失稳危险。驱动防滑与制动防抱死的控制目标就是防止车轮的滑转或抱死。为了提高车辆在复杂行驶条件下的驱制动能力,ASR和ABS算法需对轮胎非线性特性、建模不确定性以及路面附着条件变化具有良好的鲁棒性和自适应性。分布式驱动电动汽车电机的转矩准确可控、响应迅速,可以减小控制算法收敛时间;电机既是执行单元又是车轮转矩和转速的信息单元,便于实现车轮滑移率和轮胎-路面附着系数估计,提高算法自适应性。
传统的ASR和ABS控制多采用门限值控制或PID控制。其中,逻辑门限值控制不涉及被控系统的具体数学模型,门限值需通过反复试验标定;PID控制多以车轮滑移率为控制变量,针对确定的控制对象模型设计PID控制参数,可以在一定工况下实现较好的控制效果。模型跟踪控制根据电机力矩和轮速就能实现对车轮的控制,不需要对路面附着系数的辨识以及车速信息的估算。模糊逻辑控制不需要被控制对象的精确数模,对于轮胎与路面之间附着特性的非线性及路面的变化都有较强的鲁棒性。全轮驱动的分布式驱动电动汽车为驱动防滑与制动防抱死控制提供了更迅速更精确的执行器,由于缺少从动轮提供车速信息,且各驱动轮的状态不一致,因此,对状态估计精度和控制算法鲁棒性要求也进一步提高。结合轮胎-路面附着系数估计算法和车速估计算法,智能汽车研究所设计了滑模变结构鲁棒自适应滑移率控制算法(图2),算法对轮胎非线性和路面附着情况变化具有自适应性;通过设计滑模面和到达条件使控制变量迅速收敛,对模型不确定性具有鲁棒性,同时削弱了滑模面附近的抖振[1]。
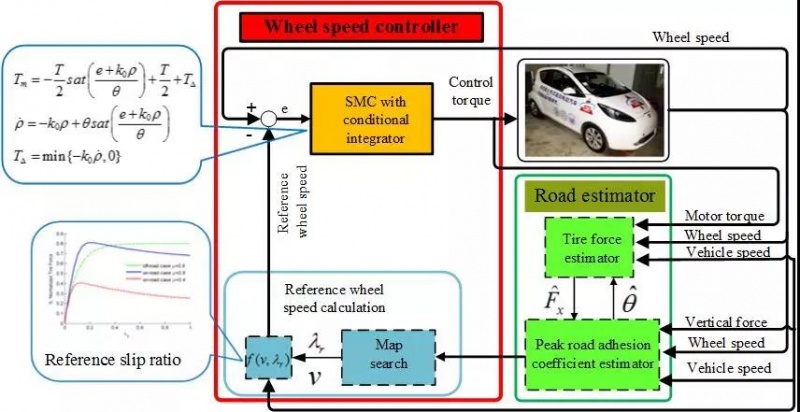
图2 滑移率控制系统架构
操纵稳定性控制
转向极限工况下,轮胎纵侧耦合和悬架的非线性特性为车辆动力学控制带来了挑战,在车辆、道路参数时变的情况下,准确估计车辆质心侧偏角和路面峰值附着系数,满足驾驶员横摆意图并稳定质心侧偏角的多执行器分配控制是研究难点和热点。分布式驱动电动汽车可以独立、精确地控制各个电机的驱/制动力矩,为车辆实现操纵稳定性控制提供硬件基础。现有的分布式驱动电动汽车转矩矢量控制普遍采用分层控制结构,上层为运动跟踪层,采用基于参考模型跟踪的控制算法,根据驾驶员的输入、车辆当前状态、参考模型等信息,计算所需要的广义控制力;下层为转矩分配控制层,将广义控制输入分配到各个车轮上,以实现对车辆运动的控制。
运动跟踪控制
分布式驱动电动汽车可以精确的控制分配到每个车轮的驱/制动转矩,在完成横摆运动控制同时可以保证驾驶员的加速意图,因此现有分布式驱动电动汽车运动跟踪控制都不存在传统ESC控制的死区,而是持续的控制车辆跟踪参考模型响应。最常见的运动跟踪控制算法结构为前馈+反馈,这类结构多配合直接横摆控制(Direct Yaw Control,DYC)参考模型,前馈控制横摆力矩控制车辆的稳态质心侧偏角为零,反馈控制横摆力矩负责消除横摆角速度跟踪误差,前馈与反馈横摆力矩之和为总的控制力矩。由于质心侧偏角无法通过量产传感器直接测量,因此,需要通过估计算法获取质心侧偏角。
由于有人驾驶车辆方向盘转角由驾驶员控制,因此只通过DYC无法同时跟踪横摆角速度和质心侧偏角两个状态变量;现有的同时跟踪二者的控制算法实际上是通过质心侧偏角误差修正横摆角速度误差,实现横摆角速度跟踪;若要同时跟踪上述两个状态,需采用主动转向控制、四轮转向控制或转向系统与分布式驱/制动系统集成控制。
运动跟踪控制中,传统的PID控制算法较为简单,可靠性高,适用于建立精确数学模型的线性定常系统,该控制器设计的关键是控制器参数的选取。但由于车辆系统存在明显的非线性以及参数不确定性,属于非线性时变系统,PID控制器在不同工况下的控制结果可能出现明显差异。
智能汽车研究所利用线性最优二次型最优调节器(LQR)实现反馈控制(图3),设定目标函数(控制能量、控制误差等),根据最优控制原理计算得到反馈控制力矩[2]。另外,考虑到车辆响应延迟导致的控制介入延迟问题,控制器对驾驶员转向意图进行预测,提高了车辆稳定性;并且设计了基于侧偏刚度辨识的自适应算法,利用在线辨识的侧偏刚度实时修正线性二次型最优调节器的反馈系数,有效改善了控制算法对侧偏刚度变化的适应性[3]。此外,为了将DYC推广到常规工况,减小控制介入感,我们使用ITAE优化上升时间、超调量,通过横摆角速度反馈或横摆角速度与质心侧偏角反馈来实现横摆力矩计算,提高车辆操纵性能[4]。
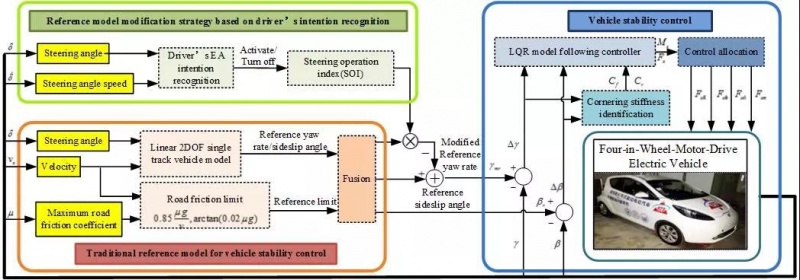
图3 分布式驱动稳定性控制系统架构
转矩分配控制
转矩分配控制的过程就是建立从广义力到各个车轮转矩的映射。由于分布式驱动系统拥有冗余执行器,执行器数量大于广义力维数,因此多采用优化分配算法以保证分配算法有解。在优化分配算法中,广义逆法是应用得比较广泛的算法。部分文献以电机消耗能量最少为优化目标,利用重新分配广义逆算法设计了转矩分配策略。而在电机转速确定的情况下,可以将电机效率拟合为转矩分配系数的凸函数,然后通过最优化算法求解四个电机转矩使电机效率最优。
有文献采用二次规划法从而实现转矩优化分配,该算法可以灵活利用代价函数和约束条件,对某些控制量进行加权或者惩罚,从而迫使系统遵循其他特定的约束条件,解决复杂控制分配问题。当执行机构出现故障或失效时,二次规划方法可以同时更新控制效率矩阵以及等式和不等式约束,使系统重构。课题组以轮胎利用率为优化目标,能够最大限度地保证车辆稳定性裕度;将分配误差和轮胎利用率等优化目标整合为加权最小二乘问题,提高求解效率;并考虑大侧偏工况轮胎纵/侧向力耦合特性,设计了动态效率矩阵,提高了转矩分配精度[3,5]。
集成控制
传统的独立设计的控制器有各自明确的控制目标。但是各系统间存在一定程度上的功能重叠和干扰,因此,多个执行系统的动作分配和多个控制目标的协调便是系统集成控制策略的关键。
为了解决复杂行驶工况下分布式驱动电动汽车多目标协调、冗余执行器分配问题,全面提升车辆经济性和主动安全性,智能汽车研究所提出了一体化动力学控制系统(图4)。通过传感器和参数估计系统获取车辆参数和状态,结合整车管理系统和横摆角速度-质心侧偏角联合稳定性判据仲裁车辆模式,将多目标协调问题化为子系统优先级问题和多目标分配问题,通过设计各子系统介入和退出条件,实现控制目标,避免子系统干扰;将多目标分配问题化为带约束的加权最小二乘问题,设计广义力跟踪误差、轮胎利用率、电机能耗、差动助力转向和轮胎滑移率等多个分配目标,根据行驶模式确定各目标权重系数。通过参数估计系统和鲁棒控制算法,实现控制系统对于车辆系统非线性特性、参数和状态变化以及行驶条件变化的自适应性;同时,对模型误差和外界扰动具有鲁棒性。

图4 集成控制系统架构
总结
1.分布式驱动电动汽车为车辆动力学控制提供了广阔的研究空间,通过转矩的优化分配,可以改善车辆的经济性、操纵稳定性、平顺性。
2.为了提升控制系统对于车辆参数、状态以及车辆行驶环境适应性,需要设计满足控制需求的状态估计与参数辨识算法,同时保证控制-估计系统的稳定性,而分布式驱动为车辆状态估计算法提供了更大的可能。
3.为了保证分布式驱动电动汽车在复杂工况下的良好行驶性能,解决多控制目标、多控制功能、多执行器和多维运动的协调问题,集成控制成为分布式驱动电动汽车动力学控制当前的研究重点。
参考文献
1. Yu, Z., Zhang, R., Lu, X., Jin, C., & Sun, K. (2017). Robust adaptive anti-slip regulation controller for a distributed-drive electric vehicle considering the driver’s intended driving torque. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, v 232, n 4, p 562-576, March 1, 2018
2. LuXiong, ZhuopingYu, YangWang, et al. Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics, 2012, 50(6):831-846.
3. Xiong L, Teng G W, Yu Z P, et al. Novel stability control strategy for distributed drive electric vehicle based on driver operation intention[J]. International Journal of Automotive Technology, 2016, 17(4):651-663.
4. Zhuoping Y U, Bo L, Lu X, et al. Direct Yaw Moment Control for Distributed Drive Electric Vehicle Handling Performance Improvement[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3):486-497.
5. Leng B, Xiong L, Yu Z, et al. Allocation control algorithms design and comparison based on distributed drive electric vehicles[J]. International Journal of Automotive Technology, 2018, 19(1):55-62.
图1 分布式驱动电动汽车构型
与传统内燃机车辆相比,分布式驱动电动汽车取消了变速器、差速器等复杂的传统系统,传动效率更高;而且各个车轮的驱动电机均能独立控制,通过电机转矩的合理分配,充分利用电机高效区间,并结合回馈制动策略,能够提高车辆的经济性。分布式驱动电动汽车可以在电机能力范围内精确、快速地实现单个车轮驱制动力矩控制和轴间、轮间转矩分配控制,便于实现先进动力学控制功能:通过单个车轮驱动力和制动力的独立控制可以实现制动防抱死(Antilock Brake System,ABS)、驱动防滑(Acceleration Slip Regulation,ASR)功能,通过直接横摆力矩控制实现操纵性改善控制(Handling Improvement Controller,HIC)、电子稳定性控制功能(Electronic Stability Controller,ESC),提高车辆主动安全性能;同时结合电机转矩信息获得路面附着系数等环境参数以及质量、车速等车辆关键参数和状态信息,改善车辆动力学性能;独立驱/制动过程中悬架产生的垂向反作用力可以影响车身的姿态角(俯仰、侧倾),改善车辆的平顺性。
驱动防滑与制动防抱死控制
根据轮胎动力学特性,当车轮快速滑转和抱死时,轮胎附着能力严重恶化,车轮和车辆有失稳危险。驱动防滑与制动防抱死的控制目标就是防止车轮的滑转或抱死。为了提高车辆在复杂行驶条件下的驱制动能力,ASR和ABS算法需对轮胎非线性特性、建模不确定性以及路面附着条件变化具有良好的鲁棒性和自适应性。分布式驱动电动汽车电机的转矩准确可控、响应迅速,可以减小控制算法收敛时间;电机既是执行单元又是车轮转矩和转速的信息单元,便于实现车轮滑移率和轮胎-路面附着系数估计,提高算法自适应性。
传统的ASR和ABS控制多采用门限值控制或PID控制。其中,逻辑门限值控制不涉及被控系统的具体数学模型,门限值需通过反复试验标定;PID控制多以车轮滑移率为控制变量,针对确定的控制对象模型设计PID控制参数,可以在一定工况下实现较好的控制效果。模型跟踪控制根据电机力矩和轮速就能实现对车轮的控制,不需要对路面附着系数的辨识以及车速信息的估算。模糊逻辑控制不需要被控制对象的精确数模,对于轮胎与路面之间附着特性的非线性及路面的变化都有较强的鲁棒性。全轮驱动的分布式驱动电动汽车为驱动防滑与制动防抱死控制提供了更迅速更精确的执行器,由于缺少从动轮提供车速信息,且各驱动轮的状态不一致,因此,对状态估计精度和控制算法鲁棒性要求也进一步提高。结合轮胎-路面附着系数估计算法和车速估计算法,智能汽车研究所设计了滑模变结构鲁棒自适应滑移率控制算法(图2),算法对轮胎非线性和路面附着情况变化具有自适应性;通过设计滑模面和到达条件使控制变量迅速收敛,对模型不确定性具有鲁棒性,同时削弱了滑模面附近的抖振[1]。
图2 滑移率控制系统架构
操纵稳定性控制
转向极限工况下,轮胎纵侧耦合和悬架的非线性特性为车辆动力学控制带来了挑战,在车辆、道路参数时变的情况下,准确估计车辆质心侧偏角和路面峰值附着系数,满足驾驶员横摆意图并稳定质心侧偏角的多执行器分配控制是研究难点和热点。分布式驱动电动汽车可以独立、精确地控制各个电机的驱/制动力矩,为车辆实现操纵稳定性控制提供硬件基础。现有的分布式驱动电动汽车转矩矢量控制普遍采用分层控制结构,上层为运动跟踪层,采用基于参考模型跟踪的控制算法,根据驾驶员的输入、车辆当前状态、参考模型等信息,计算所需要的广义控制力;下层为转矩分配控制层,将广义控制输入分配到各个车轮上,以实现对车辆运动的控制。
运动跟踪控制
分布式驱动电动汽车可以精确的控制分配到每个车轮的驱/制动转矩,在完成横摆运动控制同时可以保证驾驶员的加速意图,因此现有分布式驱动电动汽车运动跟踪控制都不存在传统ESC控制的死区,而是持续的控制车辆跟踪参考模型响应。最常见的运动跟踪控制算法结构为前馈+反馈,这类结构多配合直接横摆控制(Direct Yaw Control,DYC)参考模型,前馈控制横摆力矩控制车辆的稳态质心侧偏角为零,反馈控制横摆力矩负责消除横摆角速度跟踪误差,前馈与反馈横摆力矩之和为总的控制力矩。由于质心侧偏角无法通过量产传感器直接测量,因此,需要通过估计算法获取质心侧偏角。
由于有人驾驶车辆方向盘转角由驾驶员控制,因此只通过DYC无法同时跟踪横摆角速度和质心侧偏角两个状态变量;现有的同时跟踪二者的控制算法实际上是通过质心侧偏角误差修正横摆角速度误差,实现横摆角速度跟踪;若要同时跟踪上述两个状态,需采用主动转向控制、四轮转向控制或转向系统与分布式驱/制动系统集成控制。
运动跟踪控制中,传统的PID控制算法较为简单,可靠性高,适用于建立精确数学模型的线性定常系统,该控制器设计的关键是控制器参数的选取。但由于车辆系统存在明显的非线性以及参数不确定性,属于非线性时变系统,PID控制器在不同工况下的控制结果可能出现明显差异。
智能汽车研究所利用线性最优二次型最优调节器(LQR)实现反馈控制(图3),设定目标函数(控制能量、控制误差等),根据最优控制原理计算得到反馈控制力矩[2]。另外,考虑到车辆响应延迟导致的控制介入延迟问题,控制器对驾驶员转向意图进行预测,提高了车辆稳定性;并且设计了基于侧偏刚度辨识的自适应算法,利用在线辨识的侧偏刚度实时修正线性二次型最优调节器的反馈系数,有效改善了控制算法对侧偏刚度变化的适应性[3]。此外,为了将DYC推广到常规工况,减小控制介入感,我们使用ITAE优化上升时间、超调量,通过横摆角速度反馈或横摆角速度与质心侧偏角反馈来实现横摆力矩计算,提高车辆操纵性能[4]。
图3 分布式驱动稳定性控制系统架构
转矩分配控制
转矩分配控制的过程就是建立从广义力到各个车轮转矩的映射。由于分布式驱动系统拥有冗余执行器,执行器数量大于广义力维数,因此多采用优化分配算法以保证分配算法有解。在优化分配算法中,广义逆法是应用得比较广泛的算法。部分文献以电机消耗能量最少为优化目标,利用重新分配广义逆算法设计了转矩分配策略。而在电机转速确定的情况下,可以将电机效率拟合为转矩分配系数的凸函数,然后通过最优化算法求解四个电机转矩使电机效率最优。
有文献采用二次规划法从而实现转矩优化分配,该算法可以灵活利用代价函数和约束条件,对某些控制量进行加权或者惩罚,从而迫使系统遵循其他特定的约束条件,解决复杂控制分配问题。当执行机构出现故障或失效时,二次规划方法可以同时更新控制效率矩阵以及等式和不等式约束,使系统重构。课题组以轮胎利用率为优化目标,能够最大限度地保证车辆稳定性裕度;将分配误差和轮胎利用率等优化目标整合为加权最小二乘问题,提高求解效率;并考虑大侧偏工况轮胎纵/侧向力耦合特性,设计了动态效率矩阵,提高了转矩分配精度[3,5]。
集成控制
传统的独立设计的控制器有各自明确的控制目标。但是各系统间存在一定程度上的功能重叠和干扰,因此,多个执行系统的动作分配和多个控制目标的协调便是系统集成控制策略的关键。
为了解决复杂行驶工况下分布式驱动电动汽车多目标协调、冗余执行器分配问题,全面提升车辆经济性和主动安全性,智能汽车研究所提出了一体化动力学控制系统(图4)。通过传感器和参数估计系统获取车辆参数和状态,结合整车管理系统和横摆角速度-质心侧偏角联合稳定性判据仲裁车辆模式,将多目标协调问题化为子系统优先级问题和多目标分配问题,通过设计各子系统介入和退出条件,实现控制目标,避免子系统干扰;将多目标分配问题化为带约束的加权最小二乘问题,设计广义力跟踪误差、轮胎利用率、电机能耗、差动助力转向和轮胎滑移率等多个分配目标,根据行驶模式确定各目标权重系数。通过参数估计系统和鲁棒控制算法,实现控制系统对于车辆系统非线性特性、参数和状态变化以及行驶条件变化的自适应性;同时,对模型误差和外界扰动具有鲁棒性。
图4 集成控制系统架构
总结
1.分布式驱动电动汽车为车辆动力学控制提供了广阔的研究空间,通过转矩的优化分配,可以改善车辆的经济性、操纵稳定性、平顺性。
2.为了提升控制系统对于车辆参数、状态以及车辆行驶环境适应性,需要设计满足控制需求的状态估计与参数辨识算法,同时保证控制-估计系统的稳定性,而分布式驱动为车辆状态估计算法提供了更大的可能。
3.为了保证分布式驱动电动汽车在复杂工况下的良好行驶性能,解决多控制目标、多控制功能、多执行器和多维运动的协调问题,集成控制成为分布式驱动电动汽车动力学控制当前的研究重点。
参考文献
1. Yu, Z., Zhang, R., Lu, X., Jin, C., & Sun, K. (2017). Robust adaptive anti-slip regulation controller for a distributed-drive electric vehicle considering the driver’s intended driving torque. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, v 232, n 4, p 562-576, March 1, 2018
2. LuXiong, ZhuopingYu, YangWang, et al. Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics, 2012, 50(6):831-846.
3. Xiong L, Teng G W, Yu Z P, et al. Novel stability control strategy for distributed drive electric vehicle based on driver operation intention[J]. International Journal of Automotive Technology, 2016, 17(4):651-663.
4. Zhuoping Y U, Bo L, Lu X, et al. Direct Yaw Moment Control for Distributed Drive Electric Vehicle Handling Performance Improvement[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3):486-497.
5. Leng B, Xiong L, Yu Z, et al. Allocation control algorithms design and comparison based on distributed drive electric vehicles[J]. International Journal of Automotive Technology, 2018, 19(1):55-62.
- 下一篇:分布式电驱动系统构型分析
- 上一篇:V2X及信息安全技术进展报告



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
