




 广告
广告





















































日本自动驾驶路测规范(2/3)
2018-07-26 11:16:24· 来源:同济智能汽车研究所

近年来,在国内外研发的自动驾驶技术,将是我国减少交通事故、缓解交通拥堵不可缺少的技术。“日本复兴战略2016”(2016年6月2内阁会议决定)中提到:为了在2020年的东京奥运会和残奥会实现无人驾驶汽车这种服务,到2017年为止要就实现(无人驾驶)必要的实证测试这一点来进行制度上的环境整顿。另外,2016年“政府和民间的ITS设想·规划”(2016年5月20日高度情报通信网络社会推进战略总部决定)提出了政府部门和民间各自要致力于,与自动驾驶有关的问题处理和时间安排的实际应用的推进方针。
编者按:本文为《关于远程型自动驾驶汽车申请在公路上测试许可使用的标准制定(通知)》
警察庁丙交企発第92号、丙交指第15号【期刊号】
丙規発第12号、丙運発第10号
2017年6月1日
近年来,在国内外研发的自动驾驶技术,将是我国减少交通事故、缓解交通拥堵不可缺少的技术。“日本复兴战略2016”(2016年6月2内阁会议决定)中提到:为了在2020年的东京奥运会和残奥会实现无人驾驶汽车这种服务,到2017年为止要就实现(无人驾驶)必要的实证测试这一点来进行制度上的环境整顿。另外,2016年“政府和民间的ITS设想·规划”(2016年5月20日高度情报通信网络社会推进战略总部决定)提出了政府部门和民间各自要致力于,与自动驾驶有关的问题处理和时间安排的实际应用的推进方针。
考虑到上述种种形势,这一次将驾驶员能够远程操作汽车的自动驾驶技术(以下简称“远程自动驾驶系统”)在道路上驾驶汽车的实证试验(以下简称“远程自动驾驶系统公共道路实证试验”)归为“道路交通法”(1965年第105号法)第77条规定的道路使用许可的行为。并且,为了可以在全国范围内安全并且顺利地实施与实验对象的技术水平相符的实证测试,制定了附件的“关于远程型自动驾驶系统的公共道路实证试验的道路使用许可申请的处理标准”。有关这个处理,我们希望可以在行政事务处理上不留遗憾。
远程型自动驾驶系统的公共道路实证试验的道路使用许可申请的处理标准
关于远离汽车的驾驶员通过通信技术来实现汽车驾驶操作的这种自动驾驶技术(以下简称“远程自动驾驶系统”)在公共道路上驾驶汽车的实证实验(以下简称“远程自动驾驶系统公共道路实证测试”),被归为“道路交通法”(以下简称“法律”)第七十七条规定的获得道路使用许可就可以实施的行为。
远程自动驾驶系统公共道路实证测试的道路使用许可申请的处理标准如下:
关于许可的审查标准
实验的目的等
(A)实证测试是以促进有关远程自动驾驶系统的实际应用的技术开发为目的。
(B)能够证明实验管理员和远程监控·操作员(远离运用了自动驾驶系统来实现移动的汽车(以下称为“测试车辆”),并且根据情况,运用自动驾驶系统来监视或操作测试车辆的移动,在法律上承担驾驶者责任与义务的人。下同。)(※)在执行主体的监督下,采纳了为确保安全所必需的实施系统(包括紧急联络系统)。
※远程监控·操作员允许多人申请。但是每个远程监控·操作员运行一个或多个测试车辆时,当前每个测试车辆的远程监视·操作员仅限于一人。
(C)在需要其他法律法规,如运输业务许可的情况下,有关机构可以确认(申请者)是否事先取得有关许可,或者确定是否能够取得相关许可。
测试时间和地点
(A)原则上要求测试地位于使用的无线通信系统不会中断的地方,具有确保车辆安全运行所需要的通信环境。
(B)基于远程自动驾驶系统,测试车辆的功能以及测试场地的交通状况,将测试设定在不会给一般道路使用者造成严重交通阻碍的时间和地点。
安全措施
(A)它必须是一个可以确保安全的实施计划,其中包含基于通信延迟可能性的安全措施,以及在远程监视·操作员能够掌握的周围环境非常局限的情况下的安全确保措施。
(B)在测试车辆的前方、后方和侧面标明正在使用远程式自动驾驶系统实现行驶。
远程式自动驾驶系统的结构等
(A)必须符合道路运输车辆安全标准(1954年第67号交通部部令)(包括采用本标准缓解措施的情况)。
(B)假设车辆在进行公共道路实证测试中可能发生的条件和情况,在实验设施中对车辆进行行驶测试,并且由此测试主体可以确保测试车辆在公共道路上安全行驶。
(C)远程监控·操作员能够准确地控制测试车辆的制动机能。
(D)如果通信的响应所需要的时间超过规定时间,测试车辆必须能够安全地自动停车。
(E)如有需要,远程监控·操作员可以根据视频掌握测试车辆的情况,并与测试车辆中的人进行通话。
紧急措施
(A)为了确保交通顺畅,有建立一个在紧急情况下,警察可以快速到达现场的体系。
(B)向警方提供发动机的停止方法或者其他的有效措施,以便在发生交通事故的情况下,警察可以根据需要停止测试车辆的发动机,确保不造成交通阻碍。
远程监控·操作员
(A)根据测试车辆的种类,依照法律规定必须取得驾驶所需的驾驶执照(不包括临时驾驶执照)。
(B)采取措施,使远程监控·操作员可以始终意识到自己承担法律上的驾驶人所承担的义务和责任。
行驶审查
警察官或警务人员(原则上由驾驶执照考官或者有此经验的人员)坐上测试车辆,来确认相关的操作员之一可以根据实证测试的环境(白天夜间,交通量),在必要的时间段或者时间内,操控测试车辆在全部的测试区段中,安全并且合法地行驶(不包括为了行驶审查而申请道路许可的情形)。
一名远程监控·操作员运行多个测试车辆时的审查标准
(A)在测试场地,已经利用了自动驾驶系统对每个测试车辆进行过单独的公共道路实证实验。并且已经确认运用这个自动驾驶系统以及测试车辆可以安全地在这个测试场地行驶。
(B)远程监控·操作员能够同时监控视频和声音,以便掌握测试车辆周围的环境和行驶方向。
(C)制定了安全相关的实施计划,其中包括在行驶过程中,远程监视·操作员对一辆测试车辆进行远程控制,而对其他测试车辆的监测和运行变得困难的情况下的安全措施。
※安全对策的例子
(i)其他车辆自动并且安全地停止行驶。
(ii)追加的远程监控·操作员可以快速启动其他测试车辆的监控和操作系统。)
(D)在行驶审查中,可以确认不通过远程监控·操作员的操作,所有的车辆也可以安全、合法地行驶(不包括为了行驶审查而申请道路使用许可的情况)。
(E)如果增加同时监视/操作的实验车辆数量,原则上是每增加一辆车,就属于增加一次新的实验,每一次都将视为新的实验来申请道路使用许可。
许可期限
根据测试现场的交通情况,许可期最长不超过6个月。
1(7)中行驶审查的道路使用许可的许可期限,由行驶审查所必需的时间来决定。
许可的条件
实验场所、试验时间等
(A)只能按照申请时规定的日期、时间、地点和驾驶方法在道路上行驶。
(B)不能使用没有申请许可的自动驾驶系统和测试车辆。
(C)非申请许可中的远程监控·操作员不应使用远程自动驾驶系统运行测试车辆。
(D)在不使用远程自动驾驶系统的情况下,不运行测试车辆(除了驾驶员乘坐测试车以外)。
行驶方法
(A)在测试车辆上附上远程监控·操作员的驾驶执照的副本。
(B)在远程监控·操作员使用远程自动驾驶系统操作测试车辆时,防止操作者的视野或遥控装置的操作受到干扰。
(C)远程监控·操作员使用远程自动驾驶系统行驶时,监控测试车辆周边的状况、行驶的方向以及测试车辆的行驶状态,在车辆处于紧急状态等的情况下,保持立即执行必要操作的状态。
(D)测试车辆的车速必须保证,其刹车到完全停车所需要的距离,与普通车辆在该道路规定的速度下行驶时踩刹车到完全停车的距离一样(见附录)。
交通事故等处理方法
(A)为了在发生交通事故的情况下,使消防队员能够妥善开展消防活动,应向消防机构提交有关测试车辆的运行、停车方法等,消防活动所需要的测试车辆信息以及测试日期等测试项目的文件,并向有关消防部门解释。
(B)发生交通事故时,向消防机关和警方进行必要的通报;并且就车内人员的救助和防止测试车辆在道路上发生危险的措施,向消防机关和警方请求协助。
(C)在道路实证测试中发生交通事故时,如果有由于远程自动驾驶系统的故障或者对自动驾驶系统的过于信赖而发生交通事故的可能性,应中止测试,并正确存储和利用测试车辆录制的视频和声音,包括远程监控·操作员视频、语音等在内的操作状态记录、通讯记录等,必要时提交给相关机构,就事故的再发采取一定的防止措施后,重新申请许可。
其他
根据道路或交通情况,确定交通安全平稳时的必要事项。
许可的指导事项
(A)在自动驾驶系统公共道路实证测试指南(2016年5月由国家警察总局编制)中,参照并且有效地利用与测试目的不违背的部分,比如确保赔偿能力的项目等。
(B)于审查标准和许可条件规定的是最低限度,远程监控·操作员应根据远程自动驾驶系统的功能和实际交通情况安全运行,同时,运行机构应努力收集预防性安全技术和碰撞后减损技术的相关信息,并在必要时考虑采用新技术。
(C)远程监控·操作员应携带驾驶执照。
(D)当远程监控·操作员离开遥控装置时,应采取措施防止他人进入测试车辆。
(E)在测试车辆上附上或者标明,根据法律规定应在测试车辆上附上或者标明的书面材料等。
(F)测试车辆上必须附有高速公路许可证的副本。
(G)测试机构在行驶(测试车辆)前应当向当地居民公布测试的有关内容,并对相关细节解释说明。
(H)特定案件的具体情况,立即向管辖的警察局报告。
(I)遵守包括“道路交通法”在内的相关法律法规。
(J)根据道路交通情况酌情考虑其他事项,以确保交通安全平稳。
附录:
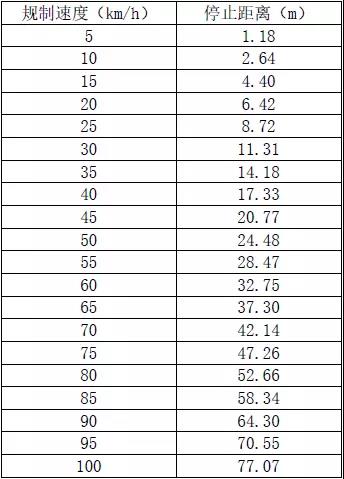
※1、该表显示运动神经正常的人,驾驶普通汽车在干燥平坦的路面上突然制动(空转时间0.75秒,摩擦系数0.7)的情况下的停车距离(四舍五入到小数点后第三位),通常用于警方对交通事故的调查。
※2、停车距离是指“在驾驶员感到危险并且踩下制动器,到制动器开始制动为止的行驶距离(空转距离),以及从制动开始到车辆停止的距离(制动距离)的总和”。
警察庁丙交企発第92号、丙交指第15号【期刊号】
丙規発第12号、丙運発第10号
2017年6月1日
近年来,在国内外研发的自动驾驶技术,将是我国减少交通事故、缓解交通拥堵不可缺少的技术。“日本复兴战略2016”(2016年6月2内阁会议决定)中提到:为了在2020年的东京奥运会和残奥会实现无人驾驶汽车这种服务,到2017年为止要就实现(无人驾驶)必要的实证测试这一点来进行制度上的环境整顿。另外,2016年“政府和民间的ITS设想·规划”(2016年5月20日高度情报通信网络社会推进战略总部决定)提出了政府部门和民间各自要致力于,与自动驾驶有关的问题处理和时间安排的实际应用的推进方针。
考虑到上述种种形势,这一次将驾驶员能够远程操作汽车的自动驾驶技术(以下简称“远程自动驾驶系统”)在道路上驾驶汽车的实证试验(以下简称“远程自动驾驶系统公共道路实证试验”)归为“道路交通法”(1965年第105号法)第77条规定的道路使用许可的行为。并且,为了可以在全国范围内安全并且顺利地实施与实验对象的技术水平相符的实证测试,制定了附件的“关于远程型自动驾驶系统的公共道路实证试验的道路使用许可申请的处理标准”。有关这个处理,我们希望可以在行政事务处理上不留遗憾。
远程型自动驾驶系统的公共道路实证试验的道路使用许可申请的处理标准
关于远离汽车的驾驶员通过通信技术来实现汽车驾驶操作的这种自动驾驶技术(以下简称“远程自动驾驶系统”)在公共道路上驾驶汽车的实证实验(以下简称“远程自动驾驶系统公共道路实证测试”),被归为“道路交通法”(以下简称“法律”)第七十七条规定的获得道路使用许可就可以实施的行为。
远程自动驾驶系统公共道路实证测试的道路使用许可申请的处理标准如下:
关于许可的审查标准
实验的目的等
(A)实证测试是以促进有关远程自动驾驶系统的实际应用的技术开发为目的。
(B)能够证明实验管理员和远程监控·操作员(远离运用了自动驾驶系统来实现移动的汽车(以下称为“测试车辆”),并且根据情况,运用自动驾驶系统来监视或操作测试车辆的移动,在法律上承担驾驶者责任与义务的人。下同。)(※)在执行主体的监督下,采纳了为确保安全所必需的实施系统(包括紧急联络系统)。
※远程监控·操作员允许多人申请。但是每个远程监控·操作员运行一个或多个测试车辆时,当前每个测试车辆的远程监视·操作员仅限于一人。
(C)在需要其他法律法规,如运输业务许可的情况下,有关机构可以确认(申请者)是否事先取得有关许可,或者确定是否能够取得相关许可。
测试时间和地点
(A)原则上要求测试地位于使用的无线通信系统不会中断的地方,具有确保车辆安全运行所需要的通信环境。
(B)基于远程自动驾驶系统,测试车辆的功能以及测试场地的交通状况,将测试设定在不会给一般道路使用者造成严重交通阻碍的时间和地点。
安全措施
(A)它必须是一个可以确保安全的实施计划,其中包含基于通信延迟可能性的安全措施,以及在远程监视·操作员能够掌握的周围环境非常局限的情况下的安全确保措施。
(B)在测试车辆的前方、后方和侧面标明正在使用远程式自动驾驶系统实现行驶。
远程式自动驾驶系统的结构等
(A)必须符合道路运输车辆安全标准(1954年第67号交通部部令)(包括采用本标准缓解措施的情况)。
(B)假设车辆在进行公共道路实证测试中可能发生的条件和情况,在实验设施中对车辆进行行驶测试,并且由此测试主体可以确保测试车辆在公共道路上安全行驶。
(C)远程监控·操作员能够准确地控制测试车辆的制动机能。
(D)如果通信的响应所需要的时间超过规定时间,测试车辆必须能够安全地自动停车。
(E)如有需要,远程监控·操作员可以根据视频掌握测试车辆的情况,并与测试车辆中的人进行通话。
紧急措施
(A)为了确保交通顺畅,有建立一个在紧急情况下,警察可以快速到达现场的体系。
(B)向警方提供发动机的停止方法或者其他的有效措施,以便在发生交通事故的情况下,警察可以根据需要停止测试车辆的发动机,确保不造成交通阻碍。
远程监控·操作员
(A)根据测试车辆的种类,依照法律规定必须取得驾驶所需的驾驶执照(不包括临时驾驶执照)。
(B)采取措施,使远程监控·操作员可以始终意识到自己承担法律上的驾驶人所承担的义务和责任。
行驶审查
警察官或警务人员(原则上由驾驶执照考官或者有此经验的人员)坐上测试车辆,来确认相关的操作员之一可以根据实证测试的环境(白天夜间,交通量),在必要的时间段或者时间内,操控测试车辆在全部的测试区段中,安全并且合法地行驶(不包括为了行驶审查而申请道路许可的情形)。
一名远程监控·操作员运行多个测试车辆时的审查标准
(A)在测试场地,已经利用了自动驾驶系统对每个测试车辆进行过单独的公共道路实证实验。并且已经确认运用这个自动驾驶系统以及测试车辆可以安全地在这个测试场地行驶。
(B)远程监控·操作员能够同时监控视频和声音,以便掌握测试车辆周围的环境和行驶方向。
(C)制定了安全相关的实施计划,其中包括在行驶过程中,远程监视·操作员对一辆测试车辆进行远程控制,而对其他测试车辆的监测和运行变得困难的情况下的安全措施。
※安全对策的例子
(i)其他车辆自动并且安全地停止行驶。
(ii)追加的远程监控·操作员可以快速启动其他测试车辆的监控和操作系统。)
(D)在行驶审查中,可以确认不通过远程监控·操作员的操作,所有的车辆也可以安全、合法地行驶(不包括为了行驶审查而申请道路使用许可的情况)。
(E)如果增加同时监视/操作的实验车辆数量,原则上是每增加一辆车,就属于增加一次新的实验,每一次都将视为新的实验来申请道路使用许可。
许可期限
根据测试现场的交通情况,许可期最长不超过6个月。
1(7)中行驶审查的道路使用许可的许可期限,由行驶审查所必需的时间来决定。
许可的条件
实验场所、试验时间等
(A)只能按照申请时规定的日期、时间、地点和驾驶方法在道路上行驶。
(B)不能使用没有申请许可的自动驾驶系统和测试车辆。
(C)非申请许可中的远程监控·操作员不应使用远程自动驾驶系统运行测试车辆。
(D)在不使用远程自动驾驶系统的情况下,不运行测试车辆(除了驾驶员乘坐测试车以外)。
行驶方法
(A)在测试车辆上附上远程监控·操作员的驾驶执照的副本。
(B)在远程监控·操作员使用远程自动驾驶系统操作测试车辆时,防止操作者的视野或遥控装置的操作受到干扰。
(C)远程监控·操作员使用远程自动驾驶系统行驶时,监控测试车辆周边的状况、行驶的方向以及测试车辆的行驶状态,在车辆处于紧急状态等的情况下,保持立即执行必要操作的状态。
(D)测试车辆的车速必须保证,其刹车到完全停车所需要的距离,与普通车辆在该道路规定的速度下行驶时踩刹车到完全停车的距离一样(见附录)。
交通事故等处理方法
(A)为了在发生交通事故的情况下,使消防队员能够妥善开展消防活动,应向消防机构提交有关测试车辆的运行、停车方法等,消防活动所需要的测试车辆信息以及测试日期等测试项目的文件,并向有关消防部门解释。
(B)发生交通事故时,向消防机关和警方进行必要的通报;并且就车内人员的救助和防止测试车辆在道路上发生危险的措施,向消防机关和警方请求协助。
(C)在道路实证测试中发生交通事故时,如果有由于远程自动驾驶系统的故障或者对自动驾驶系统的过于信赖而发生交通事故的可能性,应中止测试,并正确存储和利用测试车辆录制的视频和声音,包括远程监控·操作员视频、语音等在内的操作状态记录、通讯记录等,必要时提交给相关机构,就事故的再发采取一定的防止措施后,重新申请许可。
其他
根据道路或交通情况,确定交通安全平稳时的必要事项。
许可的指导事项
(A)在自动驾驶系统公共道路实证测试指南(2016年5月由国家警察总局编制)中,参照并且有效地利用与测试目的不违背的部分,比如确保赔偿能力的项目等。
(B)于审查标准和许可条件规定的是最低限度,远程监控·操作员应根据远程自动驾驶系统的功能和实际交通情况安全运行,同时,运行机构应努力收集预防性安全技术和碰撞后减损技术的相关信息,并在必要时考虑采用新技术。
(C)远程监控·操作员应携带驾驶执照。
(D)当远程监控·操作员离开遥控装置时,应采取措施防止他人进入测试车辆。
(E)在测试车辆上附上或者标明,根据法律规定应在测试车辆上附上或者标明的书面材料等。
(F)测试车辆上必须附有高速公路许可证的副本。
(G)测试机构在行驶(测试车辆)前应当向当地居民公布测试的有关内容,并对相关细节解释说明。
(H)特定案件的具体情况,立即向管辖的警察局报告。
(I)遵守包括“道路交通法”在内的相关法律法规。
(J)根据道路交通情况酌情考虑其他事项,以确保交通安全平稳。
附录:
※1、该表显示运动神经正常的人,驾驶普通汽车在干燥平坦的路面上突然制动(空转时间0.75秒,摩擦系数0.7)的情况下的停车距离(四舍五入到小数点后第三位),通常用于警方对交通事故的调查。
※2、停车距离是指“在驾驶员感到危险并且踩下制动器,到制动器开始制动为止的行驶距离(空转距离),以及从制动开始到车辆停止的距离(制动距离)的总和”。
- 下一篇:日本自动驾驶路测规范(3/3)
- 上一篇:日本自动驾驶路测规范(1/3)







最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
