




 广告
广告





















































自动驾驶基础(二十七)之毫米波雷达 多目标检测
2018-07-30 10:43:44· 来源:模拟世界

前文介绍了毫米波雷达的基础知识。毫米波 (mmWave) 是一类使用短波长电磁波的特殊雷达技术。雷达系统发射的电磁波信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射的信号,雷达系统可以确定物体的距离、速度和角度。
前文介绍了毫米波雷达的基础知识。毫米波 (mmWave) 是一类使用短波长电磁波的特殊雷达技术。雷达系统发射的电磁波信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射的信号,雷达系统可以确定物体的距离、速度和角度。
毫米波雷达可发射波长为毫米量级的信号。在电磁频谱中,这种波长被视为短波长,也是该技术的优势之一。而且,处理毫米波信号所需的系统组件(如天线)的尺寸确实很小。短波长的另一项优势是高准确度。工作频率为 76–81GHz(对应波长约为 4mm)的毫米波系统将能够检测小至零点几毫米的移动。
前面介绍FMCW毫米波雷达时,除了介绍对单一目标的检测,也介绍了有多个目标出现时如何消除虚假目标的问题。今天则会介绍如何检测多个物体的技术。先简单回顾一下FMCW雷达的基本概念。
FMCW雷达,可以连续发射调频信号,以测量距离以及角度和速度。这与传统的周期性发射短脉冲的传统脉冲雷达系统不同。在雷达系统中,其基本概念是指电磁信号发射过程中被其发射路径上的物体阻挡进行的反射。FMCW雷达系统所用信号的频率随时间变化呈线性升高。这种类型的信号也称为线性调频脉冲。下图以幅度(振幅)相对时间的函数,显示了线性调频脉冲信号表示。
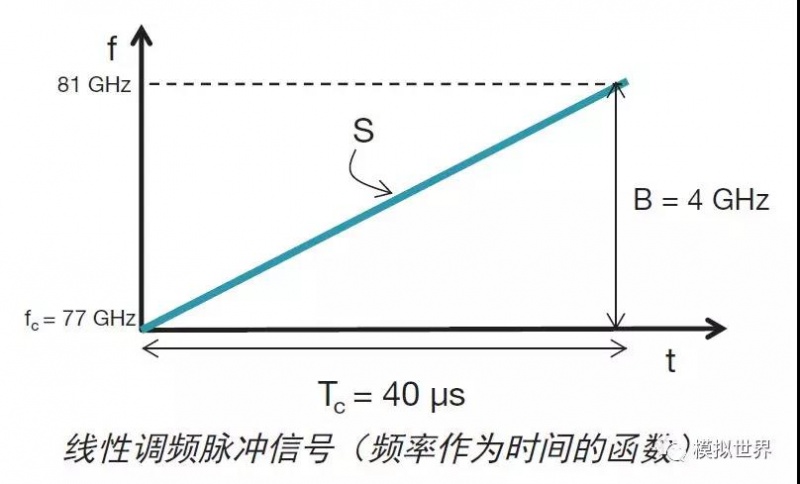
下图是一个线性调频脉冲信号,其启始频率是fc,带宽为B,持续时间是Tc。该线性调频脉冲的斜率 (S) 捕捉频率的变化率。在下图提供的示例中,fc = 77 GHz,B = 4 GHz,Tc = 40 μs,S = 100 MHz/μs.
FMCW 雷达系统发射线性调频脉冲信号,并捕捉其发射路径中的物体反射的信号。下图所示为 FMCW雷达主射频组件的简化框图。该雷达的工作原理如下:
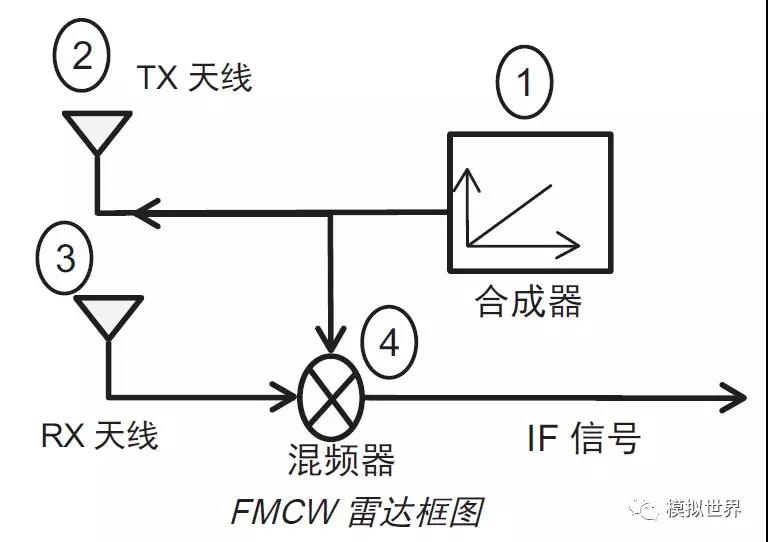
l 合成器生成一个线性调频脉冲。
l 该线性调频脉冲由发射天线(TX 天线)发射。
l 物体对该线性调频脉冲的反射生成一个由接收天线(RX 天线)捕捉的反射线性调频脉冲。
l “混频器”将 RX 和 TX 信号合并到一起,生成一个中频 (IF) 信号。
下图中的上半部分为针对检测到的单个物体的 TX和 RX 线性调频脉冲作为时间的函数。请注意,该RX 线性调频脉冲是 TX 线性调频脉冲的延时版本。延时 (
毫米波雷达可发射波长为毫米量级的信号。在电磁频谱中,这种波长被视为短波长,也是该技术的优势之一。而且,处理毫米波信号所需的系统组件(如天线)的尺寸确实很小。短波长的另一项优势是高准确度。工作频率为 76–81GHz(对应波长约为 4mm)的毫米波系统将能够检测小至零点几毫米的移动。
前面介绍FMCW毫米波雷达时,除了介绍对单一目标的检测,也介绍了有多个目标出现时如何消除虚假目标的问题。今天则会介绍如何检测多个物体的技术。先简单回顾一下FMCW雷达的基本概念。
FMCW雷达,可以连续发射调频信号,以测量距离以及角度和速度。这与传统的周期性发射短脉冲的传统脉冲雷达系统不同。在雷达系统中,其基本概念是指电磁信号发射过程中被其发射路径上的物体阻挡进行的反射。FMCW雷达系统所用信号的频率随时间变化呈线性升高。这种类型的信号也称为线性调频脉冲。下图以幅度(振幅)相对时间的函数,显示了线性调频脉冲信号表示。
下图是一个线性调频脉冲信号,其启始频率是fc,带宽为B,持续时间是Tc。该线性调频脉冲的斜率 (S) 捕捉频率的变化率。在下图提供的示例中,fc = 77 GHz,B = 4 GHz,Tc = 40 μs,S = 100 MHz/μs.
FMCW 雷达系统发射线性调频脉冲信号,并捕捉其发射路径中的物体反射的信号。下图所示为 FMCW雷达主射频组件的简化框图。该雷达的工作原理如下:
l 合成器生成一个线性调频脉冲。
l 该线性调频脉冲由发射天线(TX 天线)发射。
l 物体对该线性调频脉冲的反射生成一个由接收天线(RX 天线)捕捉的反射线性调频脉冲。
l “混频器”将 RX 和 TX 信号合并到一起,生成一个中频 (IF) 信号。
下图中的上半部分为针对检测到的单个物体的 TX和 RX 线性调频脉冲作为时间的函数。请注意,该RX 线性调频脉冲是 TX 线性调频脉冲的延时版本。延时 (
- 下一篇:智能驾驶时代,ECU的角色变了
- 上一篇:19家主机厂自动驾驶布局梳理



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
