




 广告
广告





















































车载传感器介绍
2019-01-09 16:05:16· 来源:泽尔测试

车载传感器是智能驾驶的重要组成设备,是车辆感知外界环境的关键所在。目前,ADAS (Advanced driver assistance system ,智能驾驶系统) 主要集中在激光雷达、单目相机、多目相机、毫米波雷达等方面。以Google、百度为代表的公司选择激光雷达作为其自动驾驶的主要传感器,以Tesla为代表的公司考虑到激光传感器成本因素后,选择以毫米波雷达、超声波雷达和Mobileye等传感器组合使用的方案,尽量避免使用激光雷达。
1 典型传感器介绍
车载传感器是智能驾驶的重要组成设备,是车辆感知外界环境的关键所在。目前,ADAS (Advanced driver assistance system ,智能驾驶系统) 主要集中在激光雷达、单目相机、多目相机、毫米波雷达等方面。以Google、百度为代表的公司选择激光雷达作为其自动驾驶的主要传感器,以Tesla为代表的公司考虑到激光传感器成本因素后,选择以毫米波雷达、超声波雷达和Mobileye等传感器组合使用的方案,尽量避免使用激光雷达。
1.1 激光雷达
1.1.1 雷达简介
激光雷达(英文:Lidar, Light detection and ranging) 是激光探测及测距的简称,是通过向目标发射脉冲激光以探测目标位置,速度等参数。激光雷达早期主要用于军事和民间测绘(GIS),考古学,地理学等领域[1],近年来随着自动驾驶技术的兴起,对于环境感知的要求越来越苛刻,激光雷达在自动驾驶领域的应用也随之展开。
与其他传感器相比,激光雷达选择使用工作频率较高的频段,主要有以下优点:
a) 高分辨率
激光雷达角分辨率不低于0.1mard,及可以分辨出3km距离上相聚0.3米的两个目标,并可同时跟踪多个目标,百米内的距离分辨率可达0.1m,速度分辨率可达1m/s; 距离和速度分辨率高可以利用距离多普勒成像技术获取目标的清晰图像。
b) 抗干扰性强
激光波长短,可发射发散角较小的光束,方向性好,只有在其传播路径上才能接收到,不易形成多路径效应;
c) 信息量大
微波雷达由于存在各种地面回拨的影响,低空存在一定无法探测的区域,而对于激光雷达,只有被照射的物体才会产生反射,不受地面回波的影响,理论上可以实现“零高度”工作,可以获得丰富的地面信息。此外,不仅可以获取目标的距离,还可以获取目标的速度,反射率,角度等信息,生成目标多维信息。
d) 可全天候工作
激光探测属于主动探测范畴,不依赖于外界光照条件或目标本身辐射特性,只需要发射激光光束,通过探测发射激光束的回波信号以获取目标信息。
激光雷达的缺点也十分明显:
a) 受天气和气候影响大
激光在天气情况良好的情况下衰减较小,传播距离远;在大雨,雾霾严重或者浓烟等恶略天气下衰减急剧加大,传播距离受影响。
b) 激光对射
对于激光波段一样,相互对射时,激光雷达无法判断激光源是哪个雷达,形成相对干涉,影响激光检测的稳定性。
1.1.2 激光测距
激光测距方法主要可分为3种:脉冲测距,相位测距和三角测距。
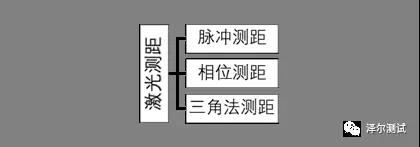
其中,脉冲测距和相位测距的工作原理是在短时间内向周围发送大量光子,通过计算反射回来光子的飞行时间(TOF, Time of Flight),计算与周围物体的距离。三角测距是通过测量激光照射点在相机中的成像位置获取距离信息。
I 脉冲测距
脉冲激光测距原理是,用脉冲激光器向目标发射一列很窄的光脉冲(脉冲宽度小于50ns),光达到目标表面后部分被反射,通过测量光脉冲从发射到返回接收机的时间,可算出激光雷达与目标之间的距离。
假设激光雷达与目标的距离为,光脉冲往返时间为,光的传播速度为,则:

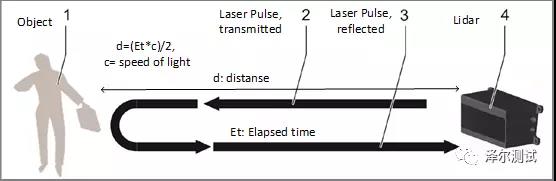
该测量方法用到了一个基准:光速,改基准带来的优点非常明显,测量速度快,由于采用高峰值的激光进行测量,其抗强光干扰能力强。该测量方法的缺点是探测电路设计难度大,难以提高检测精度,如果想将测距分辨率提高到1.5毫米,我们须将计时时钟分辨率提升到10皮秒,即设计带宽需要达到100G,现有技术很难达到。
II相位测距
相位测距法是利用特定的无线电波频段对激光雷达发出的激光进行幅度调制,然后测定调制光往返测线一次产生的相位延迟,再根据调制光的波长,换算出该相位延迟所代表的距离。如下图所示:
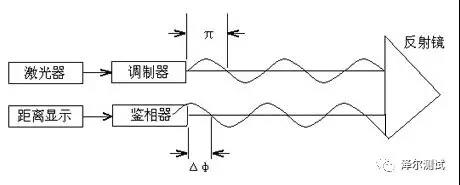
若调制光角频率为,在待测量距离上往返一次产生的相位延迟为,则对应时间 可表示为:

将此关系代入(3-6)式距离可表示为

式中:φ表示信号往返测线一次产生的总的相位延迟。ω表示调制信号的角频率,ω=2πf;
N——测线所包含调制半波长个数。Δφ——信号往返测线一次产生相位延迟不足π部分。
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。
相位测距法的最大优点是测距分辨率非常高,目前市场上相位测距仪都可以达到毫米量级分辨率。缺点是测量速度比脉冲测距慢,测准一个相位差往往需要做上几十到上百个周期,相当于测量时间加长。此外相位测距精度容易受到形状运动等因素影响,如果在测量的光斑里面有一前一后两个目标,实际测量距离是两个目标距离的一个平均距离,既不是前一个目标的距离也不是后一个目标的距离。
III三角测距
激光三角测距法通过测量激光照射点在相机中成像位置获取距离信息,如图,激光器LD 发出一束激光打在被测量物体上反射回来,经过镜头成像于CCD(成像屏幕) 上,由几何关系三角形相似得到被测距离。
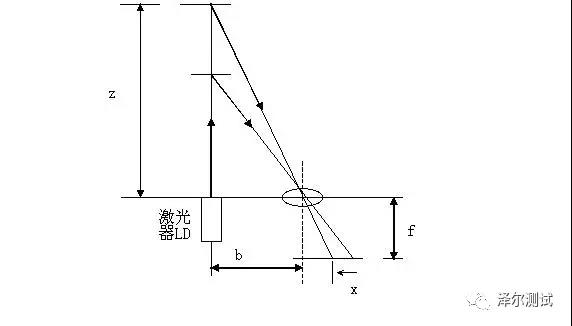
式中,b为激光器光轴与接收镜头光轴之间的距离;f为接收镜头的焦距;x为接收像点到镜头光轴的距离;其中,b和f已知,只要测出x的值就可以计算出目标的距离z。
三角测距法的优点是技术难度低,成本也很低,在近距离测距精度也很高。某些工业上使用激光测距已经可以做到百微米测量精度。缺点是检测精度随着检测距离的增加而逐渐变差,此外,CMOS相机必须用一个连续的激光同步进行照明,这种测距方式一般适合室内近距离工作,不适合在户外强光背景或者室内强光背景下工作。
表* 三种测距方法性能比较
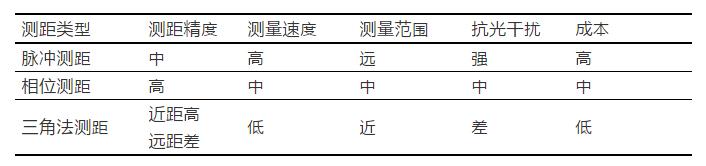
脉冲测距成本和技术难度比较大,距离测量范围和速度性能较好,距离检测精度较相位检测低一些,按目前检测技术,基本上可以实现厘米级精度。目前,车载激光雷达大部分采用这种测距方法。
车载传感器是智能驾驶的重要组成设备,是车辆感知外界环境的关键所在。目前,ADAS (Advanced driver assistance system ,智能驾驶系统) 主要集中在激光雷达、单目相机、多目相机、毫米波雷达等方面。以Google、百度为代表的公司选择激光雷达作为其自动驾驶的主要传感器,以Tesla为代表的公司考虑到激光传感器成本因素后,选择以毫米波雷达、超声波雷达和Mobileye等传感器组合使用的方案,尽量避免使用激光雷达。
1.1 激光雷达
1.1.1 雷达简介
激光雷达(英文:Lidar, Light detection and ranging) 是激光探测及测距的简称,是通过向目标发射脉冲激光以探测目标位置,速度等参数。激光雷达早期主要用于军事和民间测绘(GIS),考古学,地理学等领域[1],近年来随着自动驾驶技术的兴起,对于环境感知的要求越来越苛刻,激光雷达在自动驾驶领域的应用也随之展开。
与其他传感器相比,激光雷达选择使用工作频率较高的频段,主要有以下优点:
a) 高分辨率
激光雷达角分辨率不低于0.1mard,及可以分辨出3km距离上相聚0.3米的两个目标,并可同时跟踪多个目标,百米内的距离分辨率可达0.1m,速度分辨率可达1m/s; 距离和速度分辨率高可以利用距离多普勒成像技术获取目标的清晰图像。
b) 抗干扰性强
激光波长短,可发射发散角较小的光束,方向性好,只有在其传播路径上才能接收到,不易形成多路径效应;
c) 信息量大
微波雷达由于存在各种地面回拨的影响,低空存在一定无法探测的区域,而对于激光雷达,只有被照射的物体才会产生反射,不受地面回波的影响,理论上可以实现“零高度”工作,可以获得丰富的地面信息。此外,不仅可以获取目标的距离,还可以获取目标的速度,反射率,角度等信息,生成目标多维信息。
d) 可全天候工作
激光探测属于主动探测范畴,不依赖于外界光照条件或目标本身辐射特性,只需要发射激光光束,通过探测发射激光束的回波信号以获取目标信息。
激光雷达的缺点也十分明显:
a) 受天气和气候影响大
激光在天气情况良好的情况下衰减较小,传播距离远;在大雨,雾霾严重或者浓烟等恶略天气下衰减急剧加大,传播距离受影响。
b) 激光对射
对于激光波段一样,相互对射时,激光雷达无法判断激光源是哪个雷达,形成相对干涉,影响激光检测的稳定性。
1.1.2 激光测距
激光测距方法主要可分为3种:脉冲测距,相位测距和三角测距。
其中,脉冲测距和相位测距的工作原理是在短时间内向周围发送大量光子,通过计算反射回来光子的飞行时间(TOF, Time of Flight),计算与周围物体的距离。三角测距是通过测量激光照射点在相机中的成像位置获取距离信息。
I 脉冲测距
脉冲激光测距原理是,用脉冲激光器向目标发射一列很窄的光脉冲(脉冲宽度小于50ns),光达到目标表面后部分被反射,通过测量光脉冲从发射到返回接收机的时间,可算出激光雷达与目标之间的距离。
假设激光雷达与目标的距离为,光脉冲往返时间为,光的传播速度为,则:
该测量方法用到了一个基准:光速,改基准带来的优点非常明显,测量速度快,由于采用高峰值的激光进行测量,其抗强光干扰能力强。该测量方法的缺点是探测电路设计难度大,难以提高检测精度,如果想将测距分辨率提高到1.5毫米,我们须将计时时钟分辨率提升到10皮秒,即设计带宽需要达到100G,现有技术很难达到。
II相位测距
相位测距法是利用特定的无线电波频段对激光雷达发出的激光进行幅度调制,然后测定调制光往返测线一次产生的相位延迟,再根据调制光的波长,换算出该相位延迟所代表的距离。如下图所示:
若调制光角频率为,在待测量距离上往返一次产生的相位延迟为,则对应时间 可表示为:
将此关系代入(3-6)式距离可表示为
式中:φ表示信号往返测线一次产生的总的相位延迟。ω表示调制信号的角频率,ω=2πf;
N——测线所包含调制半波长个数。Δφ——信号往返测线一次产生相位延迟不足π部分。
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。
相位测距法的最大优点是测距分辨率非常高,目前市场上相位测距仪都可以达到毫米量级分辨率。缺点是测量速度比脉冲测距慢,测准一个相位差往往需要做上几十到上百个周期,相当于测量时间加长。此外相位测距精度容易受到形状运动等因素影响,如果在测量的光斑里面有一前一后两个目标,实际测量距离是两个目标距离的一个平均距离,既不是前一个目标的距离也不是后一个目标的距离。
III三角测距
激光三角测距法通过测量激光照射点在相机中成像位置获取距离信息,如图,激光器LD 发出一束激光打在被测量物体上反射回来,经过镜头成像于CCD(成像屏幕) 上,由几何关系三角形相似得到被测距离。
式中,b为激光器光轴与接收镜头光轴之间的距离;f为接收镜头的焦距;x为接收像点到镜头光轴的距离;其中,b和f已知,只要测出x的值就可以计算出目标的距离z。
三角测距法的优点是技术难度低,成本也很低,在近距离测距精度也很高。某些工业上使用激光测距已经可以做到百微米测量精度。缺点是检测精度随着检测距离的增加而逐渐变差,此外,CMOS相机必须用一个连续的激光同步进行照明,这种测距方式一般适合室内近距离工作,不适合在户外强光背景或者室内强光背景下工作。
表* 三种测距方法性能比较
脉冲测距成本和技术难度比较大,距离测量范围和速度性能较好,距离检测精度较相位检测低一些,按目前检测技术,基本上可以实现厘米级精度。目前,车载激光雷达大部分采用这种测距方法。
- 下一篇:李宗华:长安新能源汽车试验评价技术
- 上一篇:分布式双电机电动汽车横摆力矩控制研究







最新资讯
-
广汽神行数据仿真平台获A+级AI智驾仿真工具
2025-04-01 09:28
-
ECU的车规级试验:DV试验(十一:EMC标准及
2025-04-01 09:27
-
8岁以下儿童不用安全座椅,违法!
2025-04-01 09:25
-
L3强标真的要来了?
2025-04-01 09:24
-
美国L4试点管理规则AV STEP讲了点啥?
2025-04-01 09:23
